-
Ubuntu18.04配置Cube-SLAM
Code:https://github.com/shichaoy/cube_slam
Notes:本文描述笔者再Ubuntu18.04安装Cube-SLAM遇到的相关问题和解决方法。
配置相关问题或者Object SLAM相关科研问题欢迎通过邮件联系笔者交流:lidong8421bcd@gmail.com(基本保证两个工作日内回复邮件)
配置过程
1.环境配置
ROS环境配置:
mkdir -p ~/catkin_ws_Cube-SLAM/src cd catkin_ws_Cube-SLAM/src/ catkin_init_workspace cd .. catkin_make source devel/setup.sh catkin_make install echo "source ~/catkin_ws_Cube-SLAM/devel/setup.bash" >> ~/.bashrc- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
代码下载:
cd src/ git clone https://github.com/shichaoy/cube_slam.git- 1
- 2
2.代码编译
编译依赖项:
cd cube-slam/ sh install_dependenices.sh- 1
- 2
编译工作空间:
cd ../.. catkin_make -j4- 1
- 2
catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/src/下面文件报错如下:error: ‘std::vector’ has not been declared error: expected ‘,’ or ‘...’ before ‘<’ token error: ‘all_strings’ was not declared in this scope- 1
- 2
- 3
分析:看github的issue,这个问题是Ubuntu18.04编译经常会出现的问题。
解决方法:
-
1 :在功能包的CMAKELIST中添加
set(CMAKE_CXX_STANDARD 14),在几个C++文件中添加:#include,error: ‘iota’ is not a member of ‘std’报错问题没了 -
2:在以下几个文件中添加:
#include相关报错问题解决
catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/src/box_proposal_detail.cpp catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/src/object_3d_util.cpp catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/src/matrix_utils.cpp catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/include/detect_3d_cuboid/detect_3d_cuboid.h catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/include/detect_3d_cuboid/matrix_utils.h catkin_ws_Cube-SLAM/src/cube_slam/detect_3d_cuboid/include/detect_3d_cuboid/object_3d_util.h- 1
- 2
- 3
- 4
- 5
- 6
- 3 :orb_object_slam下C++文件报错:
error: ‘usleep’ was not declared in this scope,经典ORB-SLAM2报错问题
解决方法:在相关报错的文件上加入头文件
#include。#以下文件要添加#includecatkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/src/LocalMapping.cc catkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/src/LoopClosing.cc catkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/src/System.cc catkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/src/Viewer.cc - 1
- 2
- 3
- 4
- 5
完成之后编译成功。
运行:
roslaunch object_slam object_slam_example.launch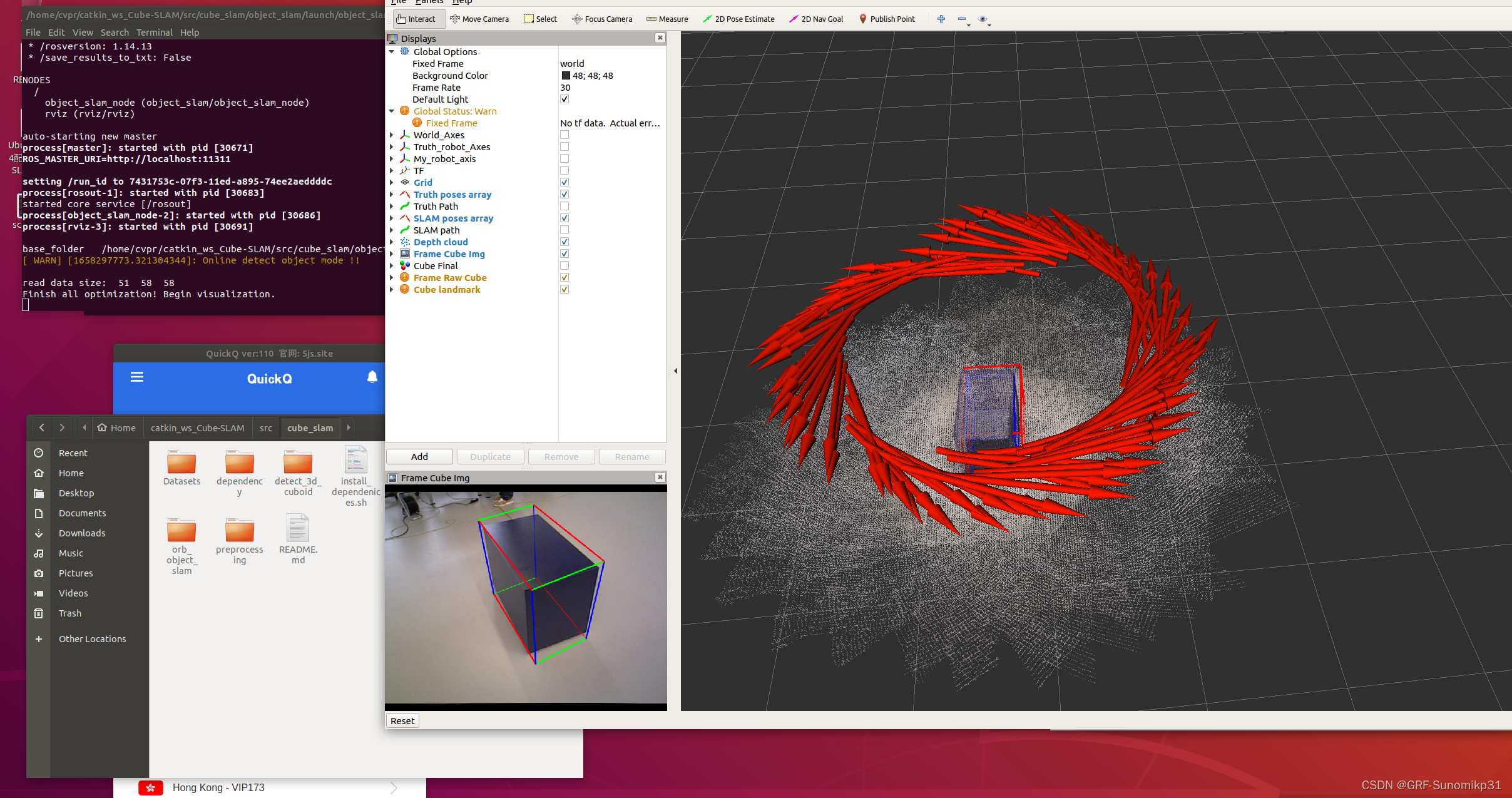
demo可以正常跑。
3.数据集下载
这里因为作者使用的数据集有格式要求,暂且使用作者给的两个数据集(作者处理好了相关格式),后续会自己制作数据集测试。 这里作者给了两个数据集,分别对应静态情况和动态情况。
(1)Static datasets
- 在https://drive.google.com/open?id=1FrBdmYxrrM6XeBe_vIXCuBTfZeCMgApL链接上下载,数据集名字为:Seq_07
(2)Dynamic datasets
- 在 https://drive.google.com/drive/folders/1T2PmK3Xt5Bq9Z7UhV8FythvramqhOo0a?usp=sharing下载,数据集名字为:0018
这里我将两个数据集解压之后放到该路径下:
catkin_ws_Cube-SLAM/src/cube_slam/Datasets4.设置路径启动代码
(1)跑Static datasets
-
这里需要先将
mono.launch文件中中的路径修改为自己数据集的路径,我这里修改为:/home/cvpr/catkin_ws_Cube-SLAM/src/cube_slam/Datasets/seq_07-20220720T061819Z-001/seq_07 -
然后报错如下:
Loading ORB Vocabulary. This could take a while... terminate called after throwing an instance of 'std::bad_alloc' what(): std::bad_alloc [ros_mono-3] process has died [pid 1257, exit code -6, cmd /home/cvpr/catkin_ws_Cube-SLAM/devel/lib/orb_object_slam/ros_mono /home/cvpr/catkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/Vocabulary/ORBvoc.bin /home/cvpr/catkin_ws_Cube-SLAM/src/cube_slam/orb_object_slam/Examples/Monocular/KITTI04-12_me.yaml /camera/image_raw:=/kitti/left/image_raw __name:=ros_mono __log:=/home/cvpr/.ros/log/48a4443c-07f6-11ed-a895-74ee2aeddddc/ros_mono-3.log]. log file: /home/cvpr/.ros/log/48a4443c-07f6-11ed-a895-74ee2aeddddc/ros_mono-3*.log- 1
- 2
- 3
- 4
- 5
这里是词袋文件的问题,即
mono.launch中args="$(find orb_object_slam)/Vocabulary/ORBvoc.bin并没有找到这个文件;解决方法:这里
cube_slam/orb_object_slam/Vocabulary提供了将txt词袋转换为二进制的bin词袋的代码。这里我使用这个代码进行词袋转换有点问题,索性就直接下载了一个二进制词袋:https://github.com/nxyzgf/sgg-dbow2/blob/master/ORBvoc.bin- 运行时,仍然报错:
Gtk-ERROR **: 04:42:33.691: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported;这里这应该是linux系统同时安装了GTK+ 2.x 和 GTK+ 3导致的,参考:https://blog.csdn.net/weixin_39768247/article/details/111855987/,卸载opencv之后又重新装一边,同时将ROS的workspace中的build和devel删除重新编译。
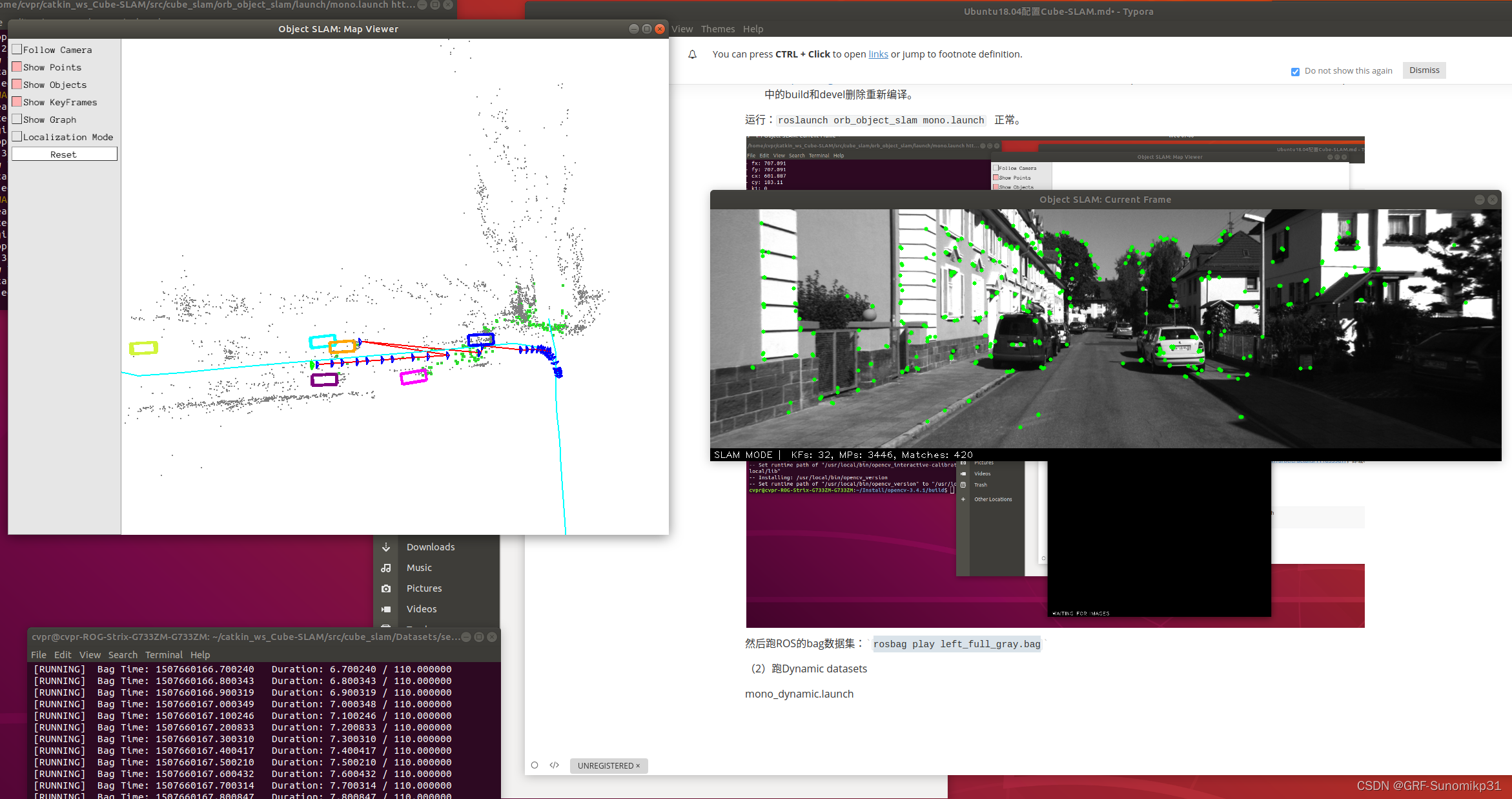
运行:
roslaunch orb_object_slam mono.launch正常。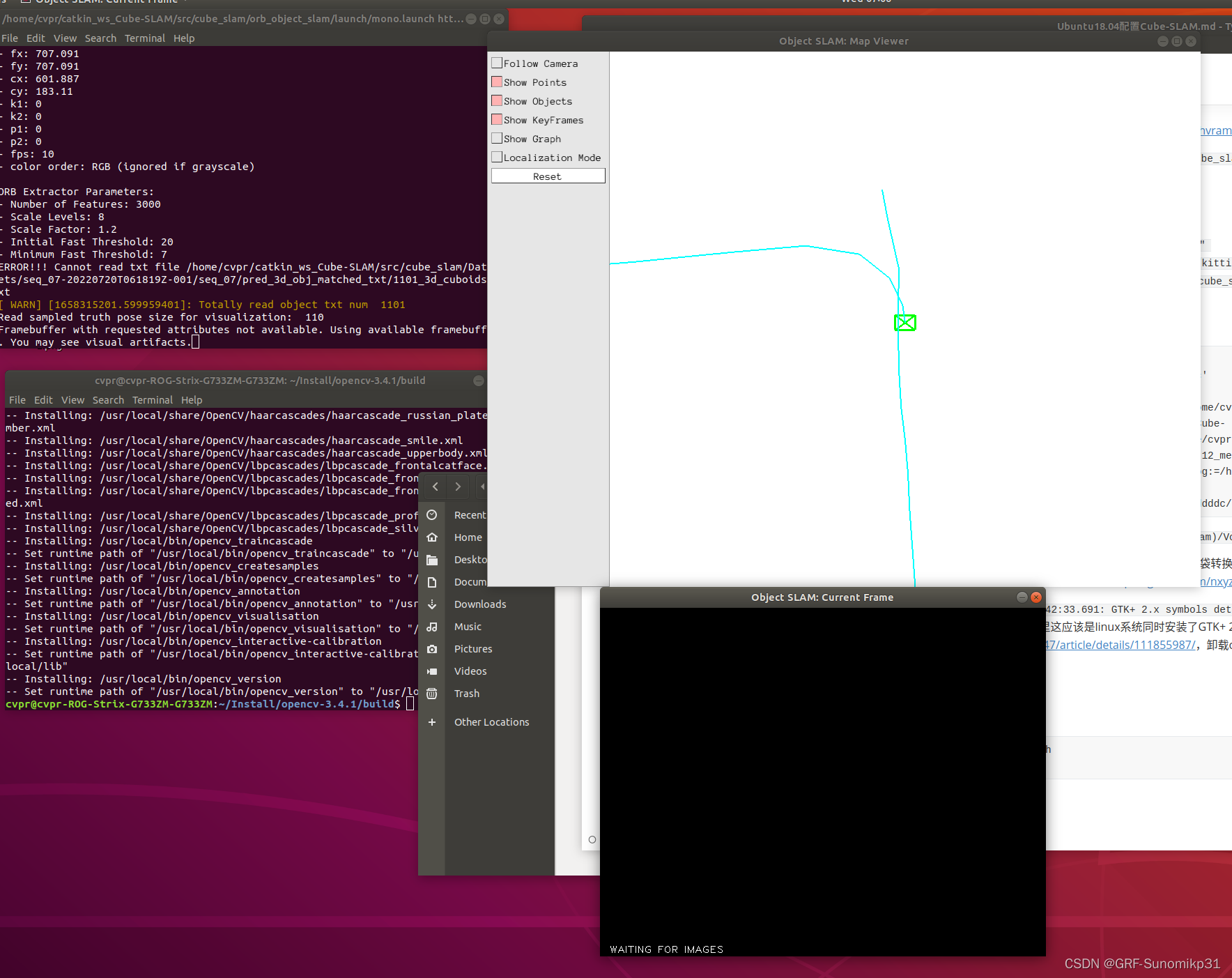
然后跑ROS的bag数据集:
rosbag play left_full_gray.bag
(2)跑Dynamic datasets
- 先修改mono_dynamic.launch文件:将文件中
改为自己数据集的地址:/home/cvpr/catkin_ws_Cube-SLAM/src/cube_slam/Datasets/0018-20220720T062223Z-001/0018即可
运行:
roslaunch orb_object_slam mono_dynamic.launch rosbag play mono.bag- 1
- 2
效果如下:

-
相关阅读:
mysql8多主多从复制搭建
【iOS开发】——Category底层原理、Extension、关联对象
云积天赫AI营销:重塑品牌营销新生态
空间域图像增强处理-含Labview程序
大模型,重构自动驾驶
碳关税及相关概念
LeetCode每日一题(321. Create Maximum Number)
【JavaSE】继承
GoLand软件编码区中出现英文输入异常解决方法
如何创建书画家百度百科词条?书画家百度百科怎么做?
- 原文地址:https://blog.csdn.net/qq_44847636/article/details/125899174