-
【开发教程4】开源蓝牙心率防水运动手环-外部 Flash 读写
开源蓝牙心率防水运动手环
——疯壳·智能穿戴开发系列
外部 Flash 读写
1 SPI+简介本节中,我们将使用 DA14580 自带的 SPI+来进行对外部 Flash 的读写操作。
SPI(Serial Peripheral interface),串行外围设备接口,是是 Motorola 首先在其 MC68HCXX 系列处理器上定义的。SPI 接口主要应用在EEPROM、FLASH、实时时钟、AD 转换器,还有数字信号处理器和数字信号解码器之间。
该接口一般使用 4 条线:串行时钟线(SCLK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线 MOSI 和低电平有效的从机选择线 NSS。我们 DA14580 的这个 SPI+接口支持 SPI 总线的一个子集。这个串行接口在主/从模式可以发送和接受 8、16 或 32 位,并且在主模式可以发送 9 位。SPI+接口有双向的 2*16 位字的 FIFO,功能得到了增强。
我们这个接口可以工作在主或从模式;有 8、9、16、32 位的操作方式;SPI 控制器的时钟达到 16MHz,SPI 时钟源可以通过编程进行 1、2、4、8 分频;SPI 的时钟线达到 8MHz;支持 SPI 的 0、1、2、3 四种工作模式;SPI——DO 的空闲电平可以通过编程设置;可屏蔽的中断发生器;单向读和写模式降低总线负载。2 硬件设计
本次我们所使用的外部 Flash 是 W25X20CL,它一共有 8 个引脚。1 号引脚 CS用于芯片的选择。2 号引脚 DO 是数据输出引脚。3 号引脚 WP 是写保护。4 号是GND。5 号 DIO 引脚既可以作为数据输入,也可以作为数据输出。6 脚 CLK 是 Flash的串行时钟信号。第 7 脚用于暂停 SPI 的通信。最后 VCC 就是电源脚。
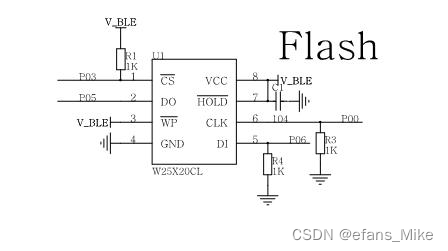
图 13 软件设计
要通过 SPI 进行对外部 Flash 的读写操作,我们首先是进行相关时钟引脚的配置,也就是下面的函数 periph_init()。
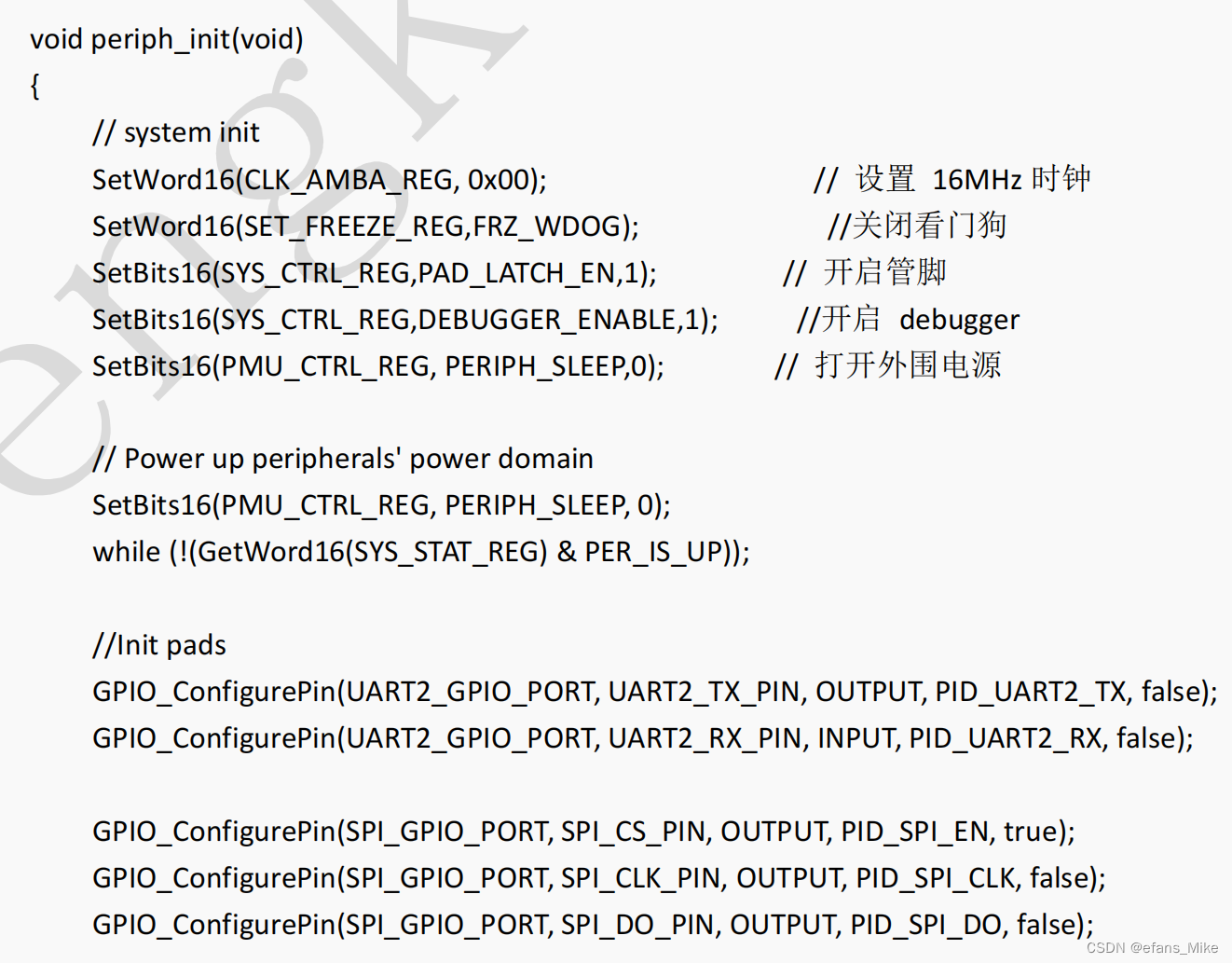
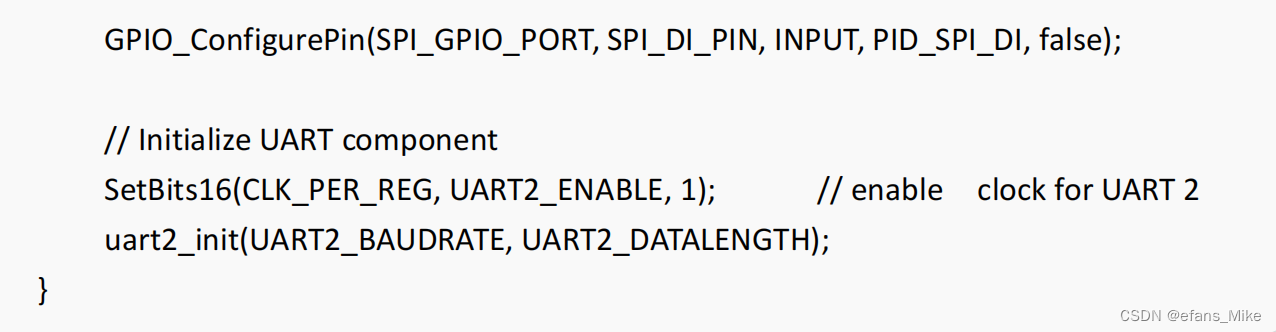
在 periph_init()中,我们完成了 SPI,uart2 的管脚配置,以及对串口 2 进行初始化。然后,我们要进行的是对 SPI 接口的一个初始化。
void spi_init(SPI_Pad_t *cs_pad_param, SPI_Word_Mode_t bitmode, SPI_Role_t role, SPI_Polarity_Mode_t clk_pol, SPI_PHA_Mode_t pha_mode, SPI_MINT_Mode_t irq, SPI_XTAL_Freq_t freq)
第一个参数 cs_pad_param 是分配给 SPI CS 信号的端口管脚,我们这里用的是 0.3 脚。
第二个参数bitmode 是 SPI 操作的位数,有 8.9.16.32 位操作模式,我们这里用的 8 位,所以填写 SPI_MODE_8BIT。
第三个参数 role 是用来配置我们 SPI 的工作方式,我们这里用的是主 SPI,因此选择 SPI_ROLE_MASTER。
第 四 个 参 数 clk_pol 是 用 来 选 择 SPI 时 钟 空 闲 极 性 , 我 们 用 的 是SPI_CLK_IDLE_POL_LOW,表示串行同步时钟的空闲状态为低电平。参数 pha_mode 是选择 SPI 的采样边沿,我们这里选的是 SPI_PHA_MODE_0。
最后两个参数 irq 和 freq 分别是用来配置 SPI 中断和时钟分频。我们选择SPI_MINT_DISABLE 和 SPI_XTAL_DIV_8。以上是我们对 SPI 的初始化设置,当然,大家也可以根据自己的需求进行配置。对 SPI 初始化设置完成之后,我们就可以开始读写外部 Flash 了,通过调用:
int32_t spi_flash_write_data (uint8_t *wr_data_ptr, uint32_t address, uint32_t size);
int32_t spi_flash_read_data (uint8_t *rd_data_ptr, uint32_t address, uint32_tsize)。4 实验现象
首先,插好 Jlink 和 USB 转串口,然后打开打开串口调试助手。
(1)选择串口号,我们图中是 COM1,这个根据实际情况选择。
(2)配置串口参数,波特率为 115200,数据位 8,停止位 1,没有校验位和控制流,与下图一致。
(3)点击打开串口,4 是串口接收框。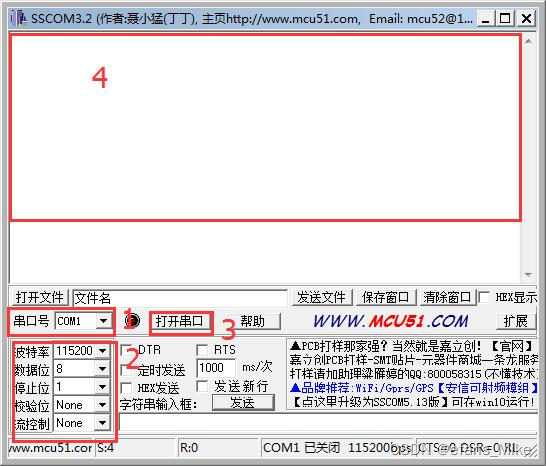
图 2
配置完串口之后,打开我们提供的代码。(1)点击仿真按键。
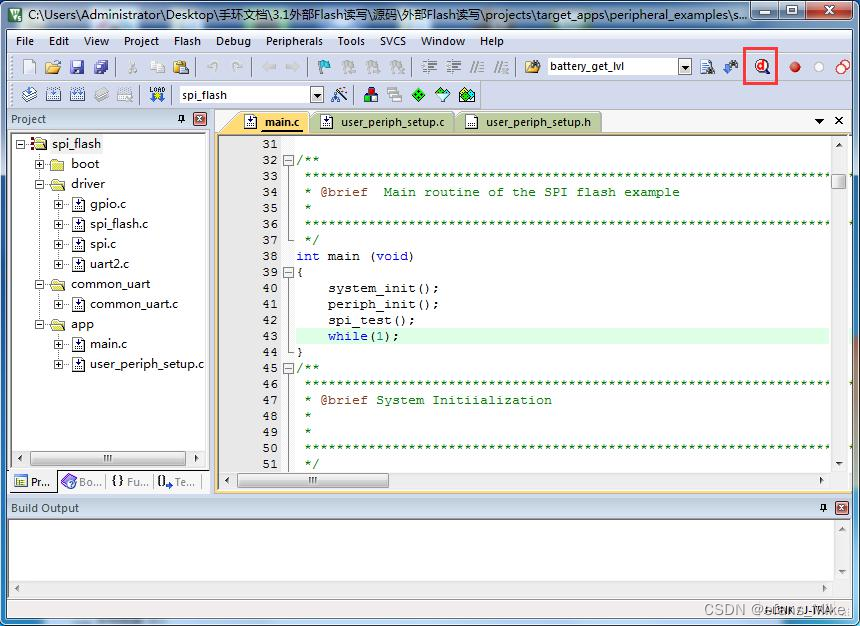
图 3
(2)点击运行代码。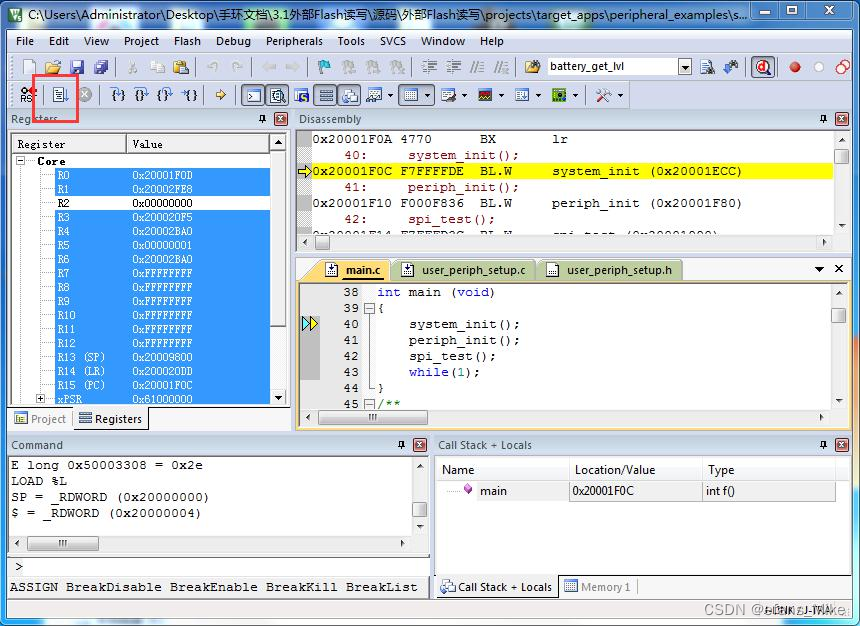
图 4
完成之后,就能看到串口调试助手接收框信息如下。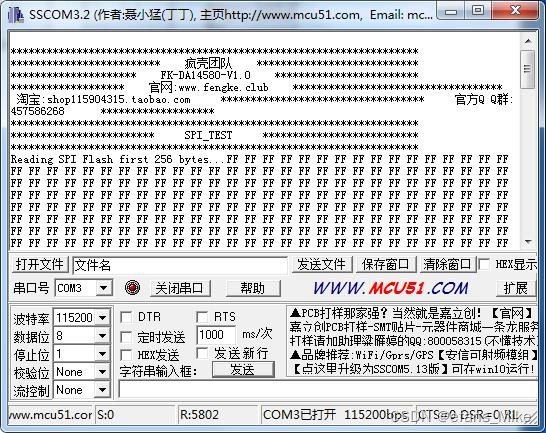
图 5更多完整学习资料和对应开源套件,请登陆官网:“疯壳”
-
相关阅读:
物联网AI MicroPython传感器学习 之 LCD1602液晶屏
PVE虚拟化平台之安装iStoreOS软路由系统
程序员脱单
无缝数据转换!使用C++ 实现 Excel文件与CSV之间的相互转换
Java中JVM的xmx和xms配置成一样的好处
计划跳槽需要做哪些准备?
Matlab:查找命令行窗口或历史记录中的文本
R语言ggplot2可视化:使用patchwork包将多个ggplot2可视化结果组合起来、两个可视化图像纵向组合之后再和另外一个可视化结果横向组合
生成对抗网络(GAN)
初识Numpy
- 原文地址:https://blog.csdn.net/efans_Mike/article/details/125895961