-
【车联网原型系统|六】效果展示
物联网原型系统导航
【车联网原型系统|一】项目介绍+需求分析+概要设计 https://blog.csdn.net/weixin_46291251/article/details/125807297
【车联网原型系统|二】数据库+应用层协议设计 https://blog.csdn.net/weixin_46291251/article/details/125808107
【车联网原型系统|三】树莓派设计+模拟基站程序 https://blog.csdn.net/weixin_46291251/article/details/125808229
【车联网原型系统|四】adhoc组网+frp内网穿透 https://blog.csdn.net/weixin_46291251/article/details/125808621
【车联网原型系统|五】前后端分离 https://blog.csdn.net/weixin_46291251/article/details/125808674
【车联网原型系统|六】效果展示 https://blog.csdn.net/weixin_46291251/article/details/125808845
【源码下载】 https://download.csdn.net/download/weixin_46291251/86227197
【车联网原型系统|六】效果展示
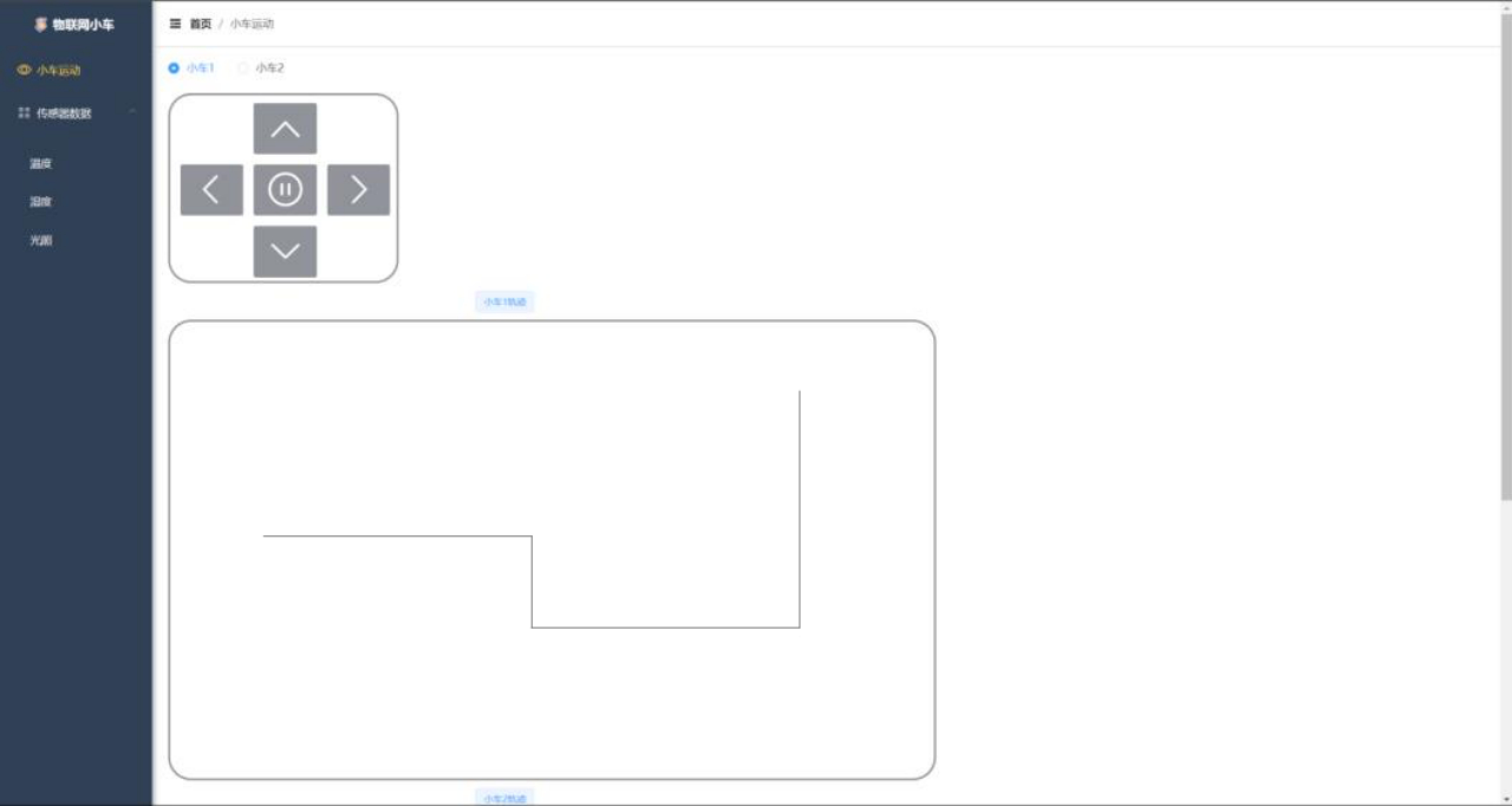
小车

运动
前端页面可以控制小车运动,且当小车运动时,前端页面可以实时显示小车运动的轨迹。
避障
小车在遇到障碍物时,优先避障。
小车会自动选择一个安全的方向移动,然后等待下一条运动指令。

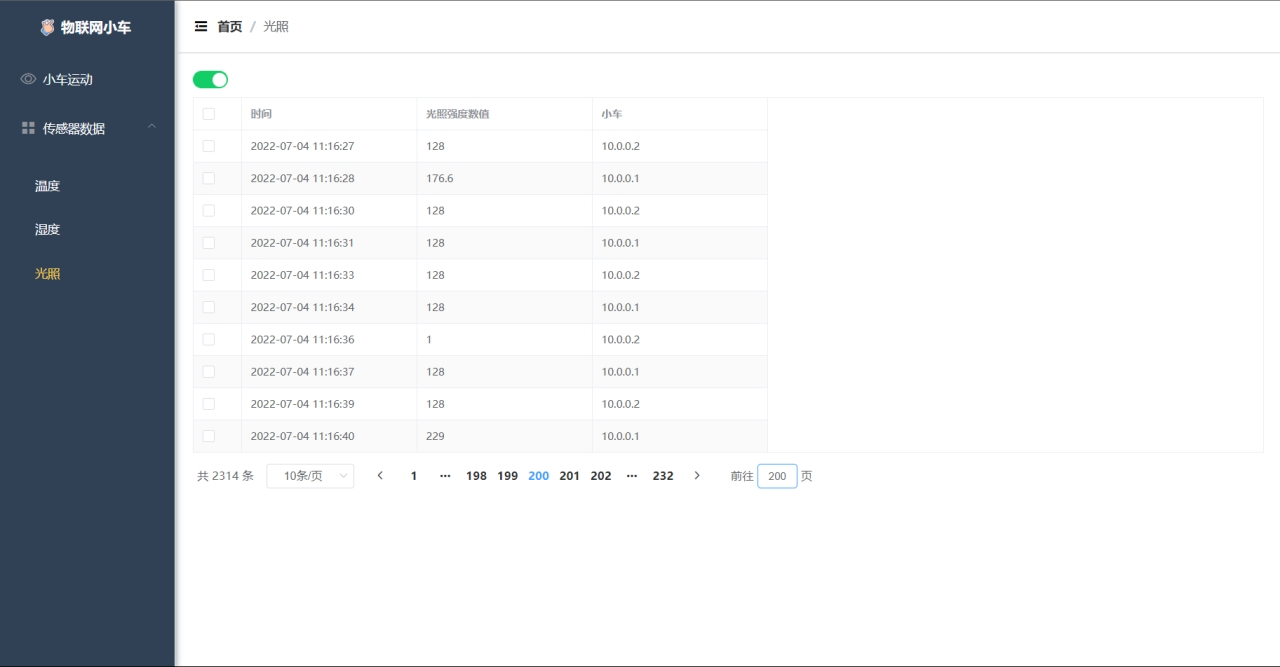
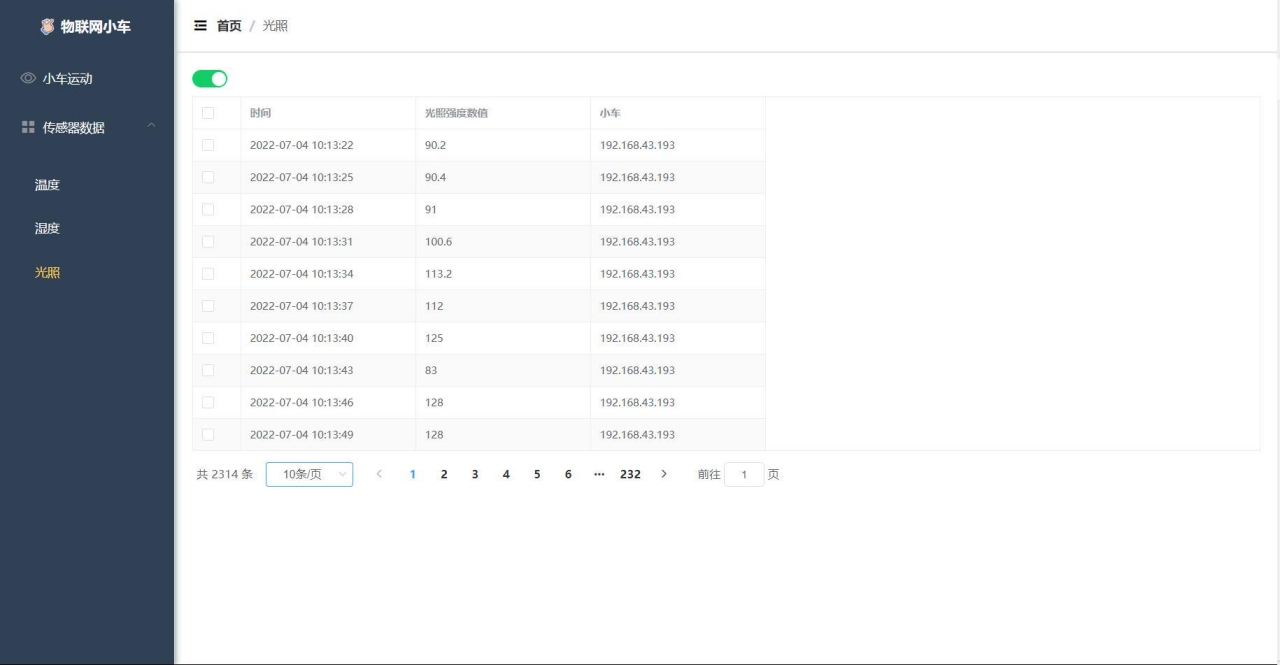
环境监测
前端页面可以实时显示小车传感器监测的环境数据。
后台展示

基站部署了Django写的服务程序,启动服务,如上图;
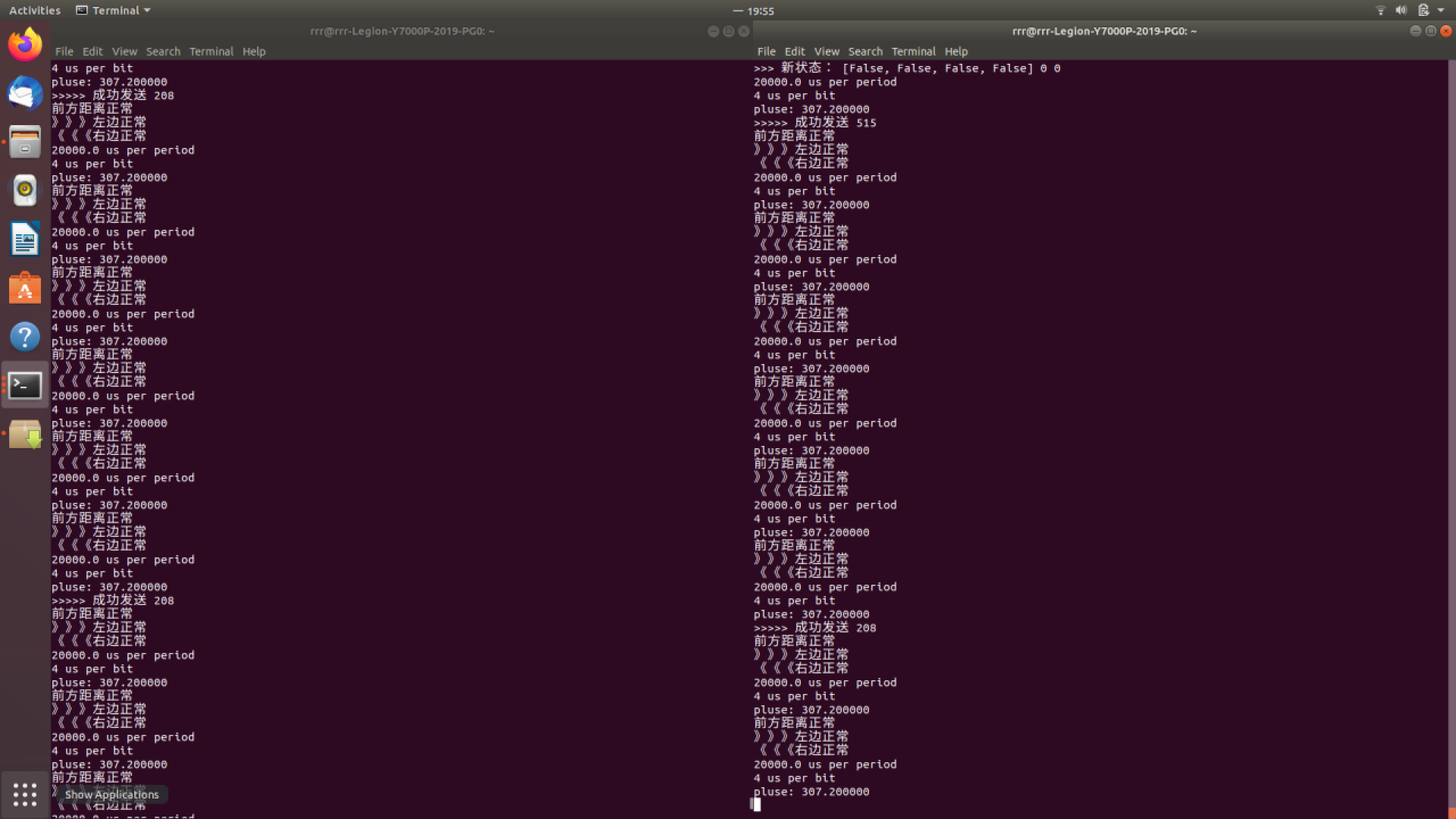
接收到来自基站的指令:
-
相关阅读:
$nextTick 原理及作用
数据结构之链表
java 云MAS业务平台_中国移动
pickle反序列化RCE分析
nginx的安装与配置启动(linux)
Nginx
用C语言实现单链表的基本操作(附有完整代码)
图划分(Graph Partition&Re-ordering): METIS(5.x)&ParMETIS(4.x)使用实践
NumPY创建数组(ndarray)对象方法应用
(数据科学学习手札157)pandas新增case_when方法
- 原文地址:https://blog.csdn.net/weixin_46291251/article/details/125808845