-
C-V2X(CANoe)CAPL接收CAN消息
1. 简述
创建两个ECU节点,一个用来发送CAN消息,一个用来接收CAN消息。
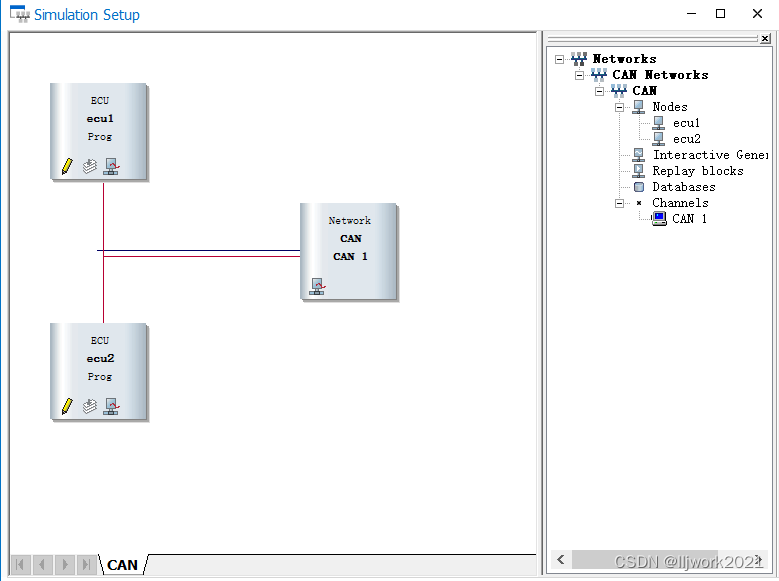
2. ECU1
/* ecu1.can */ /*@!Encoding:936*/ includes { } variables { } on preStart { write("Hello ECU1!\n"); } on start { message 0x01 msg; msg.can = 1; msg.dlc = 8; msg.byte(0) = 0x11; msg.byte(1) = 0x22; msg.byte(2) = 0x33; msg.byte(3) = 0x44; msg.byte(4) = 0x55; msg.byte(5) = 0x66; msg.byte(6) = 0x77; msg.byte(7) = 0x88; output(msg); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
3. ECU2
/* ecu2.can */ /*@!Encoding:936*/ includes { } variables { } on preStart { write("Hello ECU2!\n"); } on message 0x01 { write("ECU2: this.id = %x",this.id);//获取报文ID write("ECU2: this.name = %s",this.name);//获取报文名字 write("ECU2: this.can = %d",this.can);//获取当前报文在哪路can上 write("ECU2: this.dir = %d",this.dir);//获取当前报文是TX还是RX write("ECU2: this.dlc = %d",this.dlc);//获取当前报文的报文长度 write("ECU2: this.byte(6) = %x",this.byte(0)); write("ECU2: this.byte(7) = %x",this.byte(1)); write("ECU2: this.byte(6) = %x",this.byte(2)); write("ECU2: this.byte(7) = %x",this.byte(3)); write("ECU2: this.byte(6) = %x",this.byte(4)); write("ECU2: this.byte(7) = %x",this.byte(5)); write("ECU2: this.byte(6) = %x",this.byte(6)); write("ECU2: this.byte(7) = %x",this.byte(7)); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
4. 测试
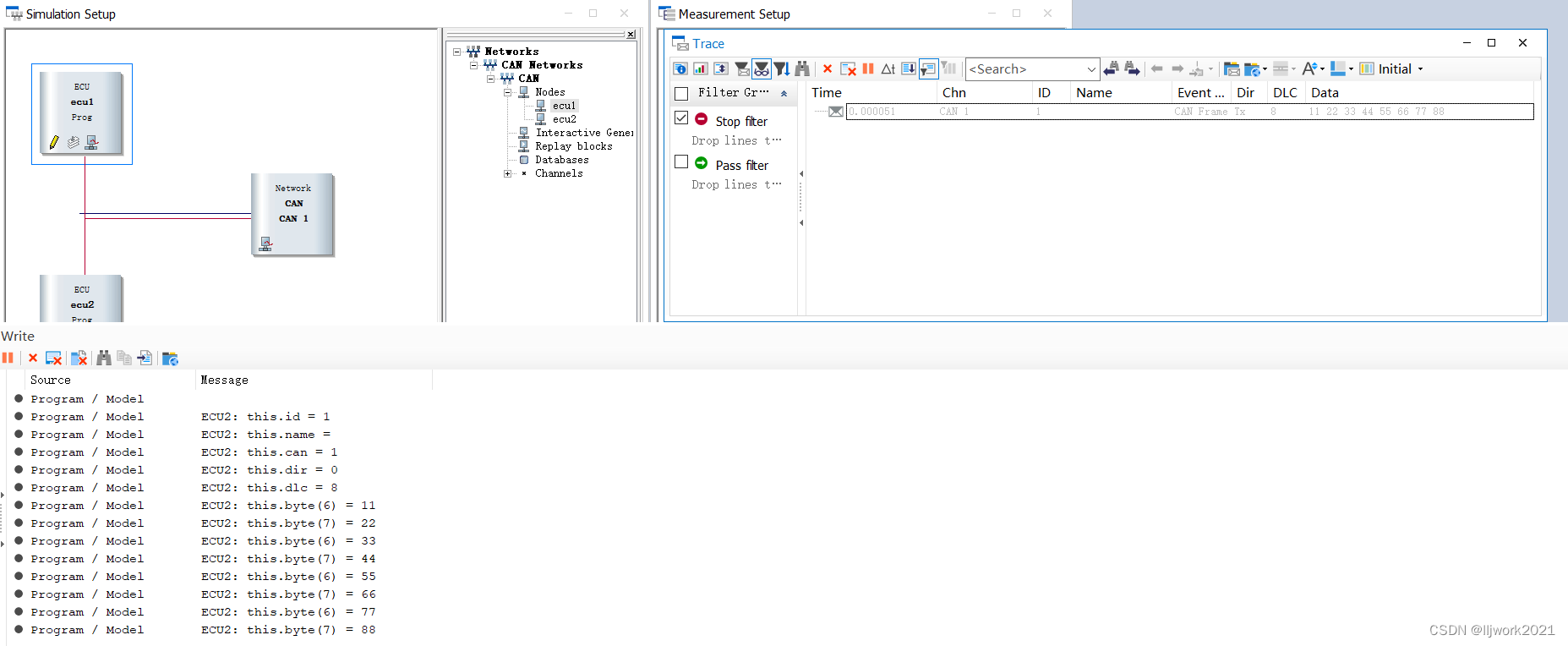
-
相关阅读:
Latex+论文+工具+邮箱客户端不能登录
MiniConda、CUDA、CUDnn以及pytorch环境的配置以及坑
OpenAI内斗剧情反转!微软力保ChatGPT之父回归?
C语言-文件读写fscanf函数
电脑键盘功能基础知识,快速入门,抓住这份详细教程
思科防火墙解析(ASA)
软件性能瓶颈问题之数据库性能问题定位
文件操作防护
HTTP、HTTPS协议以及抓包工具
TVS的原理及选型
- 原文地址:https://blog.csdn.net/qq_40723777/article/details/125622501