-
ROS2自学笔记:参数
参数为ROS2系统中的全局字典,类似于编程语言里的全局变量,具有以下特点:
1 全局共享字典
2 由键和值构成
3 可以动态监控,在一个程序里对参数的修改在其他程序里也会生效在终端操作参数:
1 查询参数列表ros2 param list
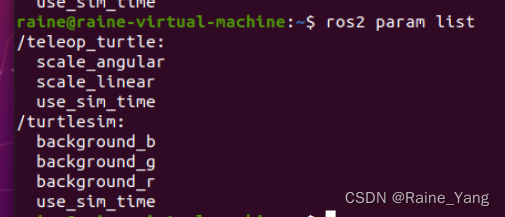
2 获取参数描述
ros2 param describe (节点名) (参数名)

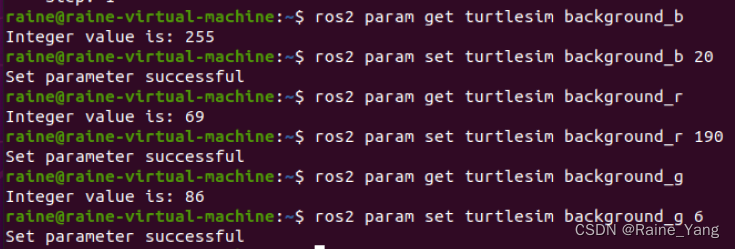
3 获取参数ros2 param get (节点名)(参数名)
4 修改参数
ros2 param set (节点名) (参数名)(设置值)
5 保存参数
保存一个节点全部参数ros2 param dump (节点名)
如果要保存参数到另一个文件,可以使用重定向将终端信息保存到一个yaml文件里(参数文件类型为yaml)
ros2 param dump (节点名) >> (文件名).yaml


6 读取参数
将一个节点所有参数设为保存的参数文件里的值ros2 param load (节点名)(参数文件)

示例1
在程序中创建,读取,修改参数import rclpy from rclpy.node import Node class ParameterNode(Node): def __init__(self, name): super().__init__(name) self.timer = self.create_timer(2, self.timer_callback) self.declare_parameter('robot_name', 'mbot') def timer_callback(self): robot_name_param = self.get_parameter('robot_name').get_parameter_value().string_value self.get_logger().info("Hello %s !" % robot_name_param) new_name_param = rclpy.parameter.Parameter('robot_name', rclpy.Parameter.Type.STRING, 'mbot') all_new_parameters = [new_name_param] self.set_parameters(all_new_parameters) def main(args=None): rclpy.init(args=args) node = ParameterNode("param_declare") rclpy.spin(node) node.destroy_node() rclpy.shutdown()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
1 self.timer = self.create_timer(2, self.timer_callback)
创建定时器,每隔1秒执行self.timer_callback函数2 self.declare_parameter(‘robot_name’, ‘mbot’)
创建参数,名称robot_name,值为mbot (参数为键-值对)3 robot_name_param = self.get_parameter(‘robot_name’).get_parameter_value().string_value
使用get_parameter(‘robot_name’)读取robot_name参数,再利用get_parameter_value()读取参数该键对应值,最后使用string_value读取String值4 self.get_logger().info(“Hello %s !” % robot_name_param)
把参数值打印到终端5 new_name_param = rclpy.parameter.Parameter(‘robot_name’, rclpy.Parameter.Type.STRING, ‘mbot’)
rclpy.parameter.Parameter修改参数值,该函数参数为:参数名,参数数据类型,参数值6 all_new_parameters = [new_name_param]
self.set_parameters(all_new_parameters)
更新参数列表并上传至ROS2系统示例2
利用参数动态调节图像处理阈值
(图像处理主体函数可以参考https://blog.csdn.net/Raine_Yang/article/details/125349724?spm=1001.2014.3001.5501)import rclpy from rclpy.node import Node from sensor_msgs.msg import Image from cv_bridge import CvBridge import cv2 import numpy as np lower_red = np.array([0, 90, 128]) upper_red = np.array([180, 255, 255]) class ImageSubscriber(Node): def __init__(self, name): super().__init__(name) self.sub = self.create_subscription(Image, 'image_raw', self.listener_callback, 10) self.cv_bridge = CvBridge() self.declare_parameter('red_h_upper', 0) self.declare_parameter('red_h+lower', 0) def object_detect(self, image): upper_red[0] = self.get_parameter('red_h_upper').get_parameter_value().integer_value lower_red[0] = self.get_parameter('red_h_lower').get_parameter_value().integer_value self.get_logger().info('Get Red H Upper: %d, Lower: %d' % (upper_red[0], lower_red[0])) hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) mask_red = cv2.inRange(hsv_img, lower_red, upper_red) contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) for cnt in contours: if cnt.shape[0] < 150: continue (x, y, w, h) = cv2.boundingRect(cnt) cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2) cv2.circle(image, (int(x + w / 2), int(y + h / 2), 5, (0, 255, 0), -1) cv2.imshow("object", image) cv2.waitKey(10) def listener_callback(self, data): self.get_logger().info('Receiving video frame') image = self.cv_bridge.imgmsg_to_cv2(data, 'bgr8') self.object_detect(image) def main(args=None): rclpy.init(args=args) rclpy.ImageSubscriber("param_object_detect") rclpy.spin(node) node.destroy_node() rclpy.shutdown()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
1 self.declare_parameter(‘red_h_upper’, 0)
self.declare_parameter(‘red_h+lower’, 0)
创建参数red_h_upper和red_h_lower,初始值为02 upper_red[0] = self.get_parameter(‘red_h_upper’).get_parameter_value().integer_value
lower_red[0] = self.get_parameter(‘red_h_lower’).get_parameter_value().integer_value
将阈值上下限里面红色的值分别赋为red_h_lower,red_h_upper在终端通过修改阈值即可手动选取要识别的颜色范围

-
相关阅读:
flink-cdc同步mysql数据到hive
通过51单片机控制SG90舵机按角度正反转转动
Python 正则表达式:强大的文本处理工具
uniapp map polygons 区域填充色(fillColor)在ios显示正常,但在安卓手机显示是黑色的,怎么解决?
电梯物联网网关软硬件一体化解决方案
python文件数据分析治理提取
关于控件的句柄随笔
详解【计算机类&面试真题】军队文职考试——第5期:什么是网桥?防火墙的端口防护是什么?| ARP地址解析协议的工作原理 | TCP的三次握手过程,若两次握手可以吗? | 差错检测及常见的差错检测技术
ATFX汇市:8月名义与核心CPI走势分化,美国通胀率算升高还是降低?
信号和电源隔离的有效设计技术
- 原文地址:https://blog.csdn.net/Raine_Yang/article/details/125619852