-
第七篇,STM32串口通信编程
1.通信的基本概念
(1)串行通信和并行通信
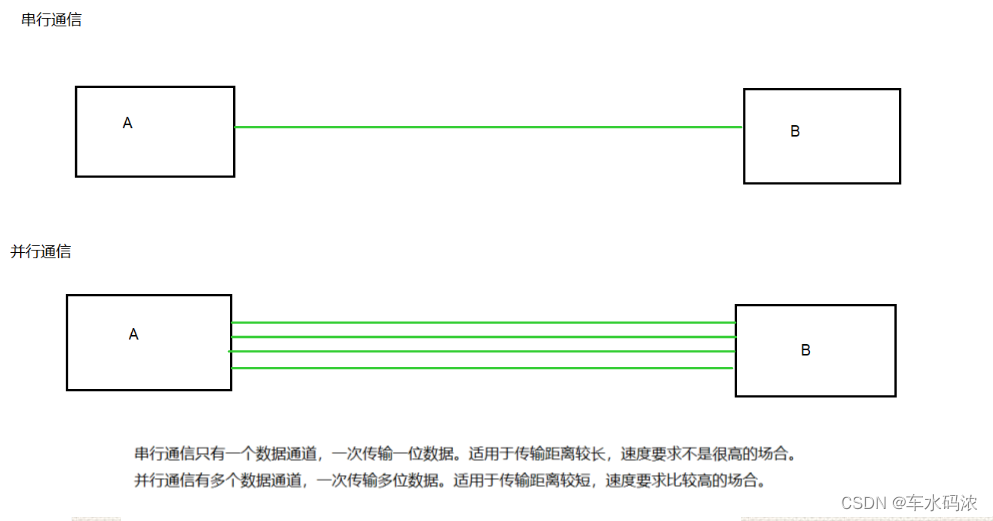
(2)单工,半双工和全双工
(3)通信速率
单位时间内传输的比特数表示传输速度,叫做波特率(bps)
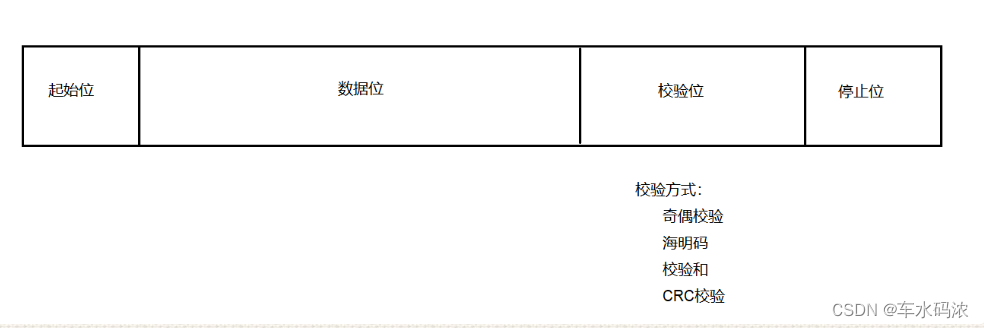
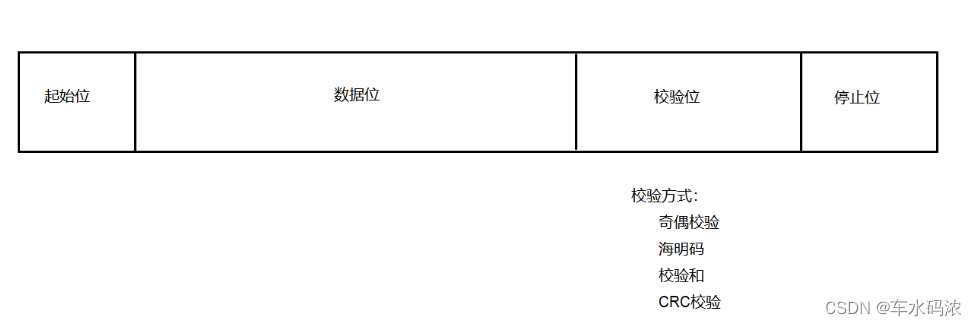
(4)通信协议(串口)
通信协议就是通信双方约定好的数据格式
2.串口的硬件连接
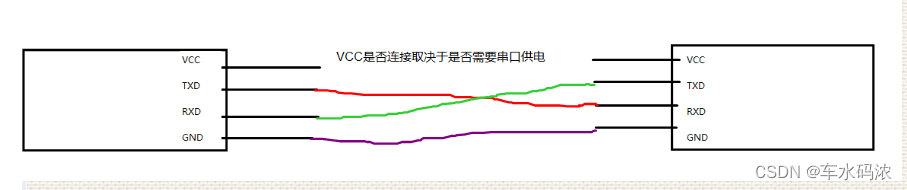
UART ----------------- 通用异步收发器
USART --------------- 通用同步/异步收发器
3.stm32的串口开发
(1)原理图
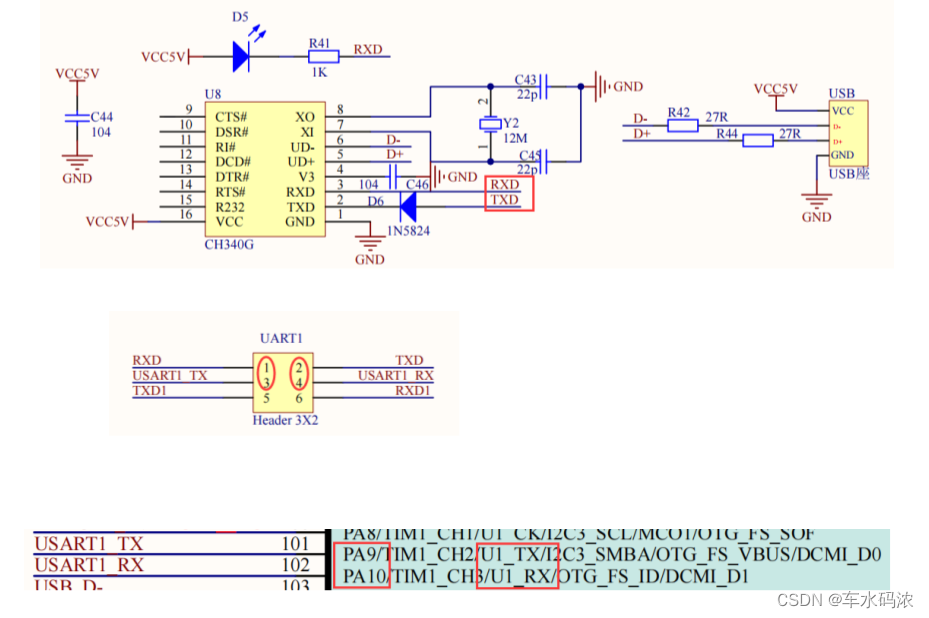
USB调试口连接到了CPU的PA9 PA10,它们具有串口复用的功能
(2)CPU芯片手册


(3)串口接口的编程实现
在工程中添加串口库函数源码

1)开启GPIOA和USART1的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
2)将PA9 PA10配置为复用功能,并且映射到串口1
GPIO_Init(...); GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
3)初始化串口
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct); 参数: USARTx - 哪个串口
USART_InitStruct - 串口初始化结构
typedef struct
{
uint32_t USART_BaudRate; /*!< 波特率 */
uint16_t USART_WordLength; /*!< 数据位长度 @ref USART_Word_Length */
uint16_t USART_StopBits; /*!< 停止位长度 @ref USART_Stop_Bits */
uint16_t USART_Parity; /*!< 校验方式 @ref USART_Parity */
uint16_t USART_Mode; /*!< 发送/接收模式 @ref USART_Mode */
uint16_t USART_HardwareFlowControl; /*!< 硬件流控制 @ref USART_Hardware_Flow_Control */ } USART_InitTypeDef;
4)使能串口
USART_Cmd(USART1,ENABLE);
5)数据的发送和接收
发送:
//轮询
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
//传入往哪个串口发送什么数据
//每次发送前查询上一个数据是否发送完成
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
//传入哪个串口的什么标志,返回SET表示有该标志,返回RESET表示没有该标志
//USART_FLAG_TC ----- 发送完成标志
———————————————————————————————————————————
练习:
实现串口1字符串的发送
———————————————————————————————————————————
//功能函数代码
- #include <stm32f4xx.h>
- #include <usart.h>
- #include <stdio.h>
- #include <string.h>
- #include <includes.h>
- //stm32开发板上运行程序,如果主机运行了调试器,程序就会使用主机的输入输出设备
- //这是方式叫半主机模式,printf如果要通过串口打印,必须关闭半主机模式
- #pragma import(__use_no_semihosting)
- struct __FILE{
- int handle;
- };
- FILE __stdout;
- //定义_sys_exit函数避免使用半主机模式
- void _sys_exit(int x)
- {
- x = x;
- }
- //重定义fputc
- int fputc(int ch,FILE *F)
- {
- //等待上一个数据发送完成
- while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
- //发送
- USART_SendData(USART1,ch);
- return ch;
- }
- void usart1_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- USART_InitTypeDef USART_InitStruct;
- NVIC_InitTypeDef NVIC_InitStruct;
- //1.开启GPIOA和USART1时钟
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
- //2.配置PA9 PA10为串口功能
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;//复用模式
- GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;//推挽输出
- GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;//高速
- GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;//无上下拉
- GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
- GPIO_Init(GPIOA,&GPIO_InitStruct);
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
- //3.初始化串口 8N1
- USART_InitStruct.USART_BaudRate = 115200;//波特率
- USART_InitStruct.USART_WordLength = USART_WordLength_8b;//8位数据位
- USART_InitStruct.USART_StopBits = USART_StopBits_1;//1位停止位
- USART_InitStruct.USART_Parity = USART_Parity_No;//无校验
- USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;//发送接收模式
- USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件流控制
- USART_Init(USART1,&USART_InitStruct);
- //4.开启串口接收中断(清除中断标志)
- USART_ClearITPendingBit(USART1, USART_IT_RXNE);
- USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
- //5.初始化NVIC
- NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
- NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x2;//抢占优先级
- NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x2;//响应优先级
- NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;//使能
- NVIC_Init(&NVIC_InitStruct);
- //.使能串口
- USART_Cmd(USART1,ENABLE);
- }
- //发送一个字符(轮询)
- void uart1_putc(char ch)
- {
- //等待上一个数据发送完成
- while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
- USART_SendData(USART1,ch);
- }
-
相关阅读:
Postman
【登录问题:拦截器和过滤器的应用】
最小特权原则 (POLP)
UML反刍
linux生产者消费者模型
常见限流算法(固定or滑动窗口、漏桶、令牌桶)
【架构设计】.Net Core负载均衡实现
解决【面板运行时发生错误: ‘解析软件列表发生错误,已尝试自动修复,请刷新页面重试!‘】的图文教程
c语言练习87:合并两个有序数组
【斗破年番】彩鳞换装美翻,雁落天惨死,萧炎暗杀慕兰三老遇险,彩鳞霸气护夫
- 原文地址:https://blog.csdn.net/weixin_44651073/article/details/125609944
