-
最小生成树 Minimum Spanning Tree
0.构建最小生成树
给你一个points 数组,表示 2D 平面上的一些点,其中 points[i] = [xi, yi] 。 连接点 [xi, yi] 和点 [xj, yj] 的费用为它们之间的 曼哈顿距离 :|xi - xj| + |yi - yj| ,其中 |val| 表示 val 的绝对值。 请你返回将所有点连接的最小总费用。只有任意两点之间 有且仅有 一条简单路径时,才认为所有点都已连接。- 1
- 2
- 3
- 4
- 5
示例 1:
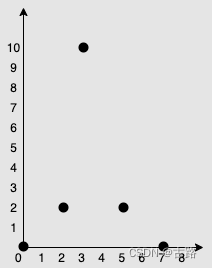
输入:points = [[0,0],[2,2],[3,10],[5,2],[7,0]] 输出:20- 1
- 2
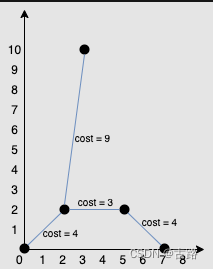
解释: 我们可以按照上图所示连接所有点得到最小总费用,总费用为 20 。 注意到任意两个点之间只有唯一一条路径互相到达。- 1
- 2
- 3
- 4
示例 2: 输入:points = [[3,12],[-2,5],[-4,1]] 输出:18 示例 3: 输入:points = [[0,0],[1,1],[1,0],[-1,1]] 输出:4 示例 4: 输入:points = [[-1000000,-1000000],[1000000,1000000]] 输出:4000000 示例 5: 输入:points = [[0,0]] 输出:0- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
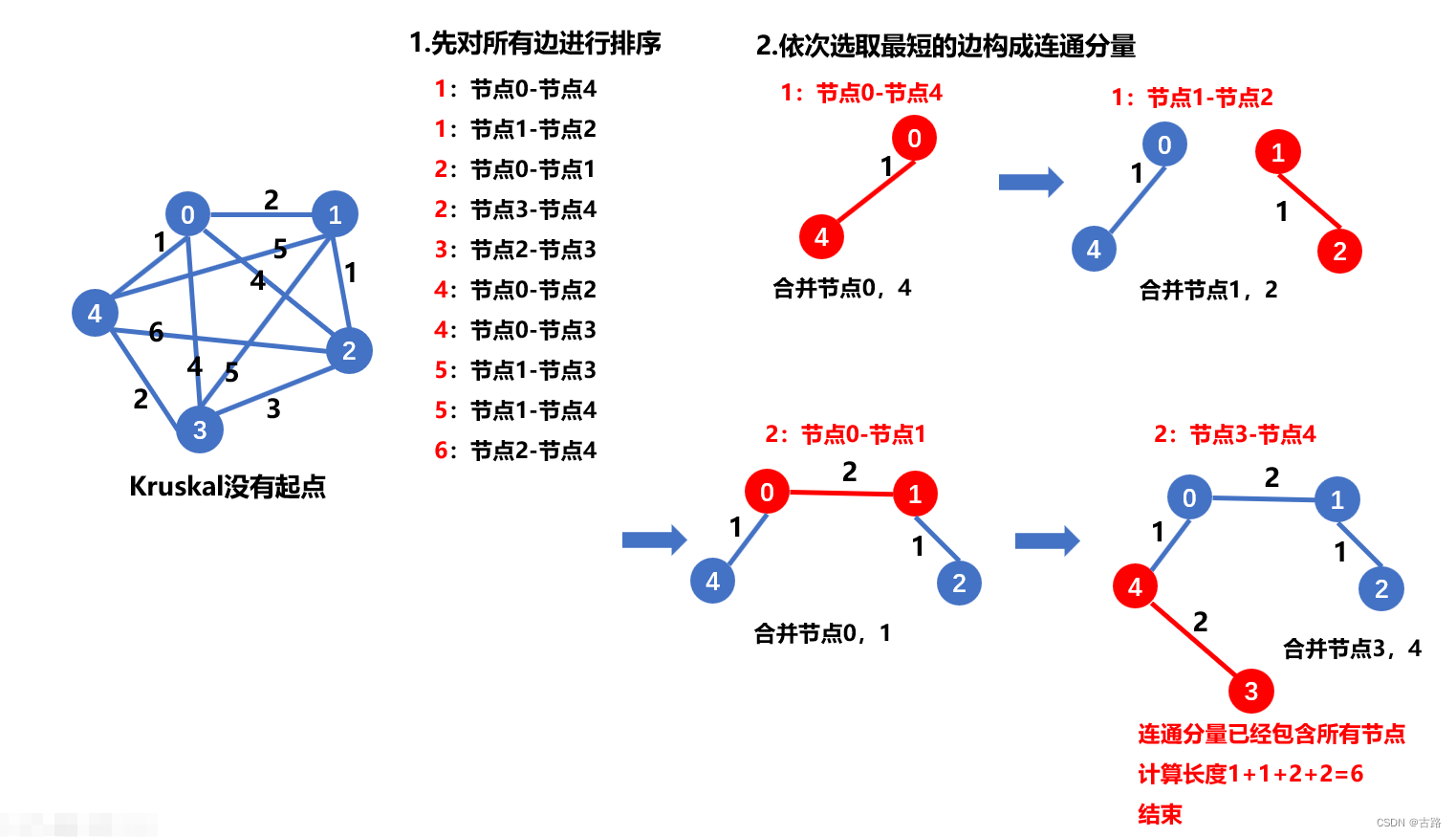
1.Kruskal算法
Kruskal算法思路:
- 将每个边按权重从小到大的排序
- 依次添加边
- 利用并查集判断新添加的边是否回环
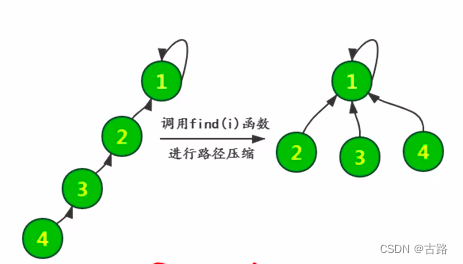
/* * @Date: 2022-06-30 * @Author: bFeng */ /* * @lc app=leetcode.cn id=1584 lang=cpp * * [1584] 连接所有点的最小费用 */ // @lc code=start class UnionFind { public: UnionFind(int n) { count_ = n; parent_.resize(n); for (int i = 0; i < n; ++i) { parent_[i] = i; // 自己为自己的父节点 } } // 并 void Union(int point1, int point2) { int f1 = Find(point1); int f2 = Find(point2); if (f1 == f2) return; // 根节点相同,已经在一个图中了 parent_[f1] = f2; // f1(point1的祖先) 的父节点设为 f2(point2的祖先) } // 查 // int Find(int point) { // // 如果父节点不是自己,则一直向上找到根节点 // while (parent_[point] != point) { // parent_[point] = parent_[parent_[point]]; // point = parent_[point]; // } // return parent_[point]; // } // 查 递归 // int Find(int point) { // if (parent_[point] == point) // return point; // else // return find(parent_[point]); // } // 如果根节点为同一个,则是连通的 // 查 递归 int Find(int i) { if (parent_[i] == i) return i; else { // 路径压缩 parent_[i] = Find(parent_[i]); return parent_[i]; } } // 如果根节点为同一个,则是连通的 bool Connected(int point1, int point2) { return Find(point1) == Find(point2); } private: int count_; std::vector<int> parent_; }; struct Edge { int p1_; int p2_; int manhattan_; Edge(int p1, int p2, int manhattan) : p1_(p1), p2_(p2), manhattan_(manhattan) {} }; class Solution { public: int minCostConnectPoints(vector<vector<int>>& points) { int points_size = points.size(); UnionFind union_find(points_size); std::vector<Edge> edges; for (int i = 0; i < points_size; ++i) { for (int j = i + 1; j < points_size; ++j) { int i_x = points[i][0]; int i_y = points[i][1]; int j_x = points[j][0]; int j_y = points[j][1]; int manhattan = std::abs(i_x - j_x) + std::abs(i_y - j_y); edges.emplace_back(i, j, manhattan); } } // 若是最大生成树,把这里的 ‘<’ 改为 ‘>’ 即可 std::sort(edges.begin(), edges.end(), [&](Edge& a, Edge& b) { return a.manhattan_ < b.manhattan_; }); int res_mst = 0; // 贪心选择 for (auto edge : edges) { int point1 = edge.p1_; int point2 = edge.p2_; int distance = edge.manhattan_; if (union_find.Connected(point1, point2)) continue; res_mst += distance; union_find.Union(point1, point2); } return res_mst; } }; // @lc code=end- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- Kruskal 算法以边为单元,时间 O ( m l o g ( m ) ) O(m log(m)) O(mlog(m)) 主要取决于边数,比较适合于稀疏图.
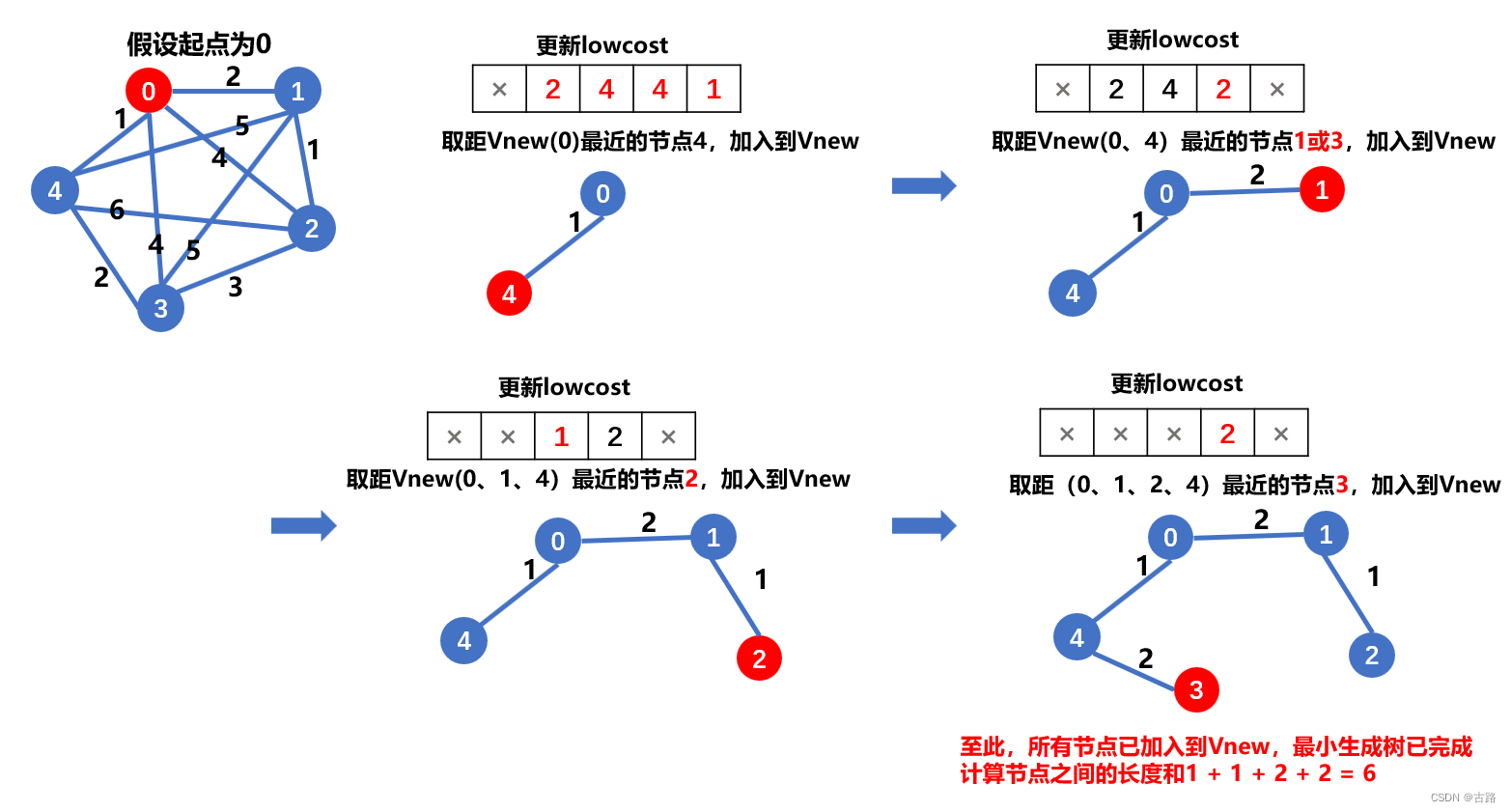
2.Prim算法
prim 算法其实就是 BFS 思想。
/* * @Date: 2022-06-30 * @Author: bFeng */ /* * @lc app=leetcode.cn id=1584 lang=cpp * * [1584] 连接所有点的最小费用 */ // @lc code=start struct Edge { int p1_; int p2_; int manhattan_; Edge(int p1, int p2, int manhattan) : p1_(p1), p2_(p2), manhattan_(manhattan) {} }; // 注意优先队列 class Compare = std::less<typename Container::value_type> // less 时是最大堆 // 若要构建最大生成树,把此处的 ‘>’ 改为 '<' struct Cmp { bool operator()(Edge& a, Edge& b) { return a.manhattan_ > b.manhattan_; } }; class Solution { public: int minCostConnectPoints(vector<vector<int>>& points) { int points_size = points.size(); // 示例1: points_size = 5 visited_.resize(points_size); // 自上而下,自左到右 对节点编号 0 1 2 3 4 // 邻接表 // graph[0]: (p1, w01),(p2, w02),(p3, w03),(p4, w04) // graph[1]: (p2, w12),(p3, w13),(p4, w14) // graph[2]: (p3, w23),(p4, w24) // graph[3]: (p4, w34) // graph[4]: std::vector<std::vector<pair<int, int>>> graph(points_size); for (int i = 0; i < points_size; ++i) { for (int j = i + 1; j < points_size; ++j) { int i_x = points[i][0]; int i_y = points[i][1]; int j_x = points[j][0]; int j_y = points[j][1]; int manhattan = std::abs(i_x - j_x) + std::abs(i_y - j_y); graph[i].push_back({j, manhattan}); graph[j].push_back({i, manhattan}); } } int res_mst = 0; visited_[0] = true; cut(0, graph); // 贪心选择 while(!edge_queue_.empty()) { // 取出这一列表中最小权重的边 Edge edge = edge_queue_.top(); edge_queue_.pop(); int to_point = edge.p2_; int weight = edge.manhattan_; if (visited_[to_point]) continue; res_mst += weight; visited_[to_point] = true; // BFS cut(to_point, graph); } return res_mst; } private: std::priority_queue<Edge, std::vector<Edge>, Cmp> edge_queue_; // std::vector<bool> visited_ = {false}; void cut(int point, std::vector<std::vector<std::pair<int,int>>>& graph) { for (auto& p : graph[point]) { // 遍历一个表,构建边并排序 int to_point = p.first; int weight = p.second; if (visited_[to_point]) continue; edge_queue_.push({point, to_point, weight}); } } };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
注意优先队列的 cmp ,有点反直觉啊。
- 时间复杂度 O ( n 2 ) O(n^2) O(n2), 适合稠密图
-
相关阅读:
m基于自适应遗传优化的IEEE-6建设费用和网络损耗费用最小化电网规划算法matlab仿真
NYIST计科ACM第四次招新赛( Round 2 )
oppo手机便签隐藏了一条怎样打开?手机如何找到隐藏便签?
kali更换国内源 2022年更新
【Java八股40天-Day6】 多线程及高并发1
【LeetCode每日一题】——38.外观数列
第十六章 协程
六、C语言循环语句
JAVACPU占用过高、内存泄漏问题排查
重新整理 .net core 实践篇 ———— linux 上线篇 [外篇]
- 原文地址:https://blog.csdn.net/fb_941219/article/details/125543610