-
Xavier MAC与PHY自适应速率分析-代码分析
1. xavier与marvell 88e1512 的原理图连接
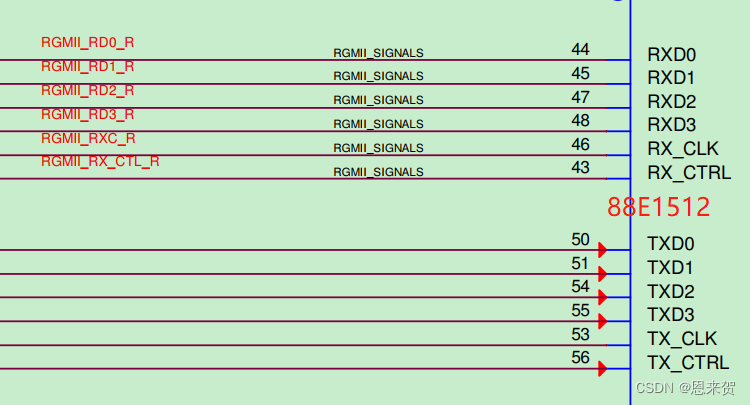
为RGMII接口,连接定义参考如:
其中,发送端有:n TXC:发送端参考时钟
n TD[0:3]:发送数据引脚
n TX_CTL:发送控制引脚
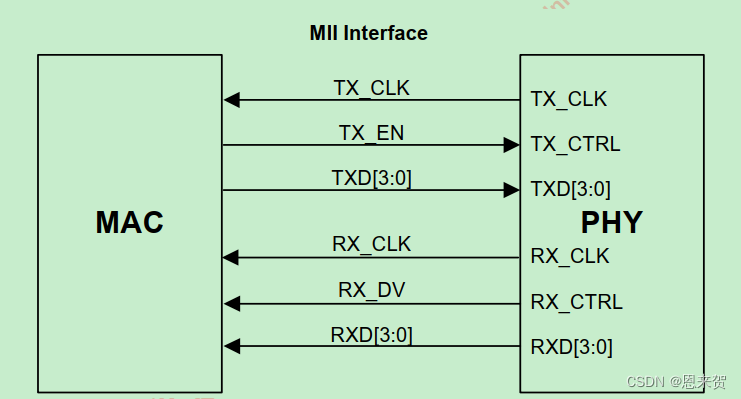
TX_CTL信号线上传送TX_EN和TX_ER两种信息,在TXC的上升沿发送TX_EN,下降沿发送TX_ER。
注:在千兆速率下,向PHY提供TXC信号,TXD、TXEN、TXER信号与此时钟信号同步。
在10/100M速率下,PHY提供 TXCLK时钟信号,其它信号与此信号同步。其工作频率为25MHz(100M网络)或2.5MHz(10M网络)。
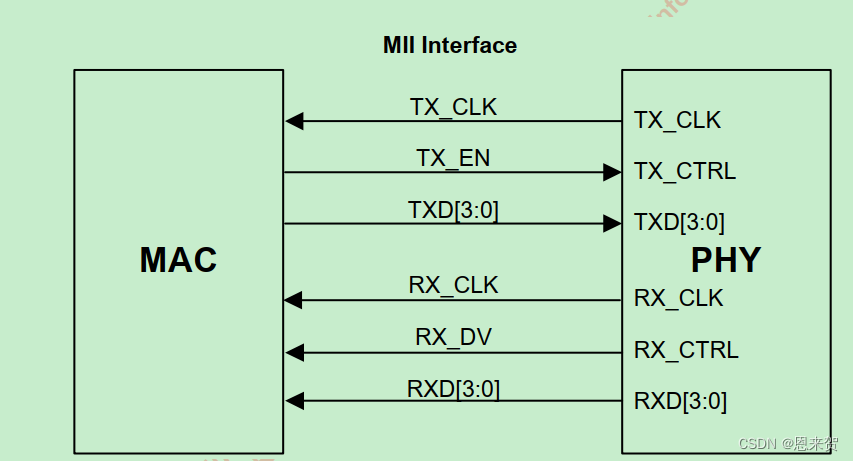
类似于如下的MII接口模式:
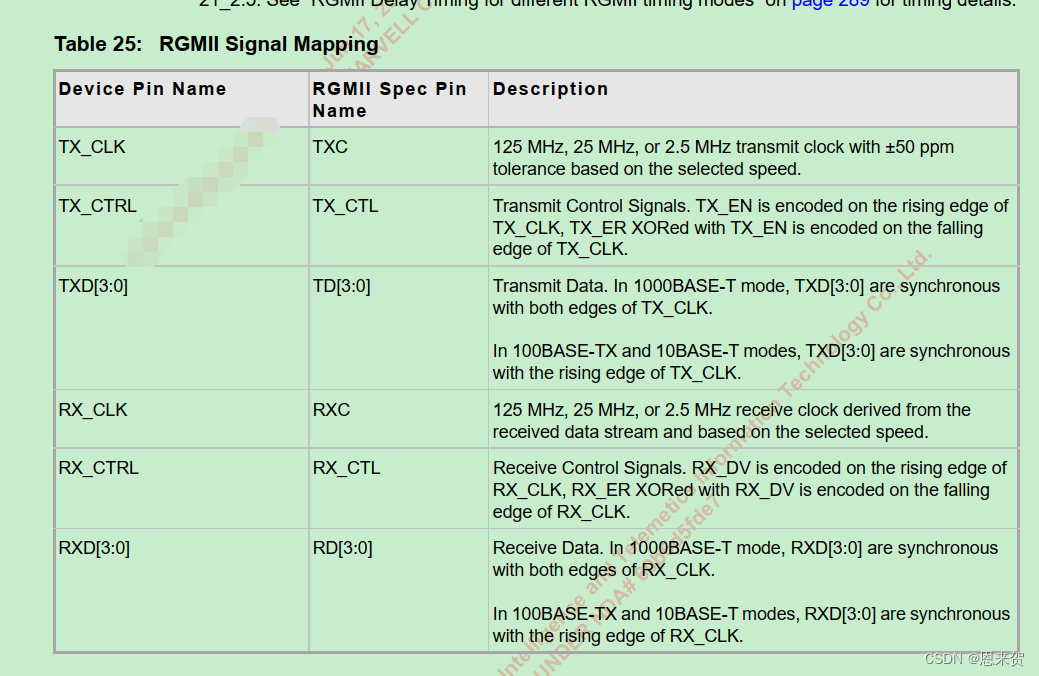
88E1512RGMII寄存器说明
从代码看速率自适应的过程
硬件 xavier
软件 linux-4.9
kernel-4.9/kernel/nvidia/drivers/net/ethernet/nvidia/eqos/init.c
eqos_init_module-> platform_driver_register(&eqos_driver)static struct platform_driver eqos_driver = {
.probe = eqos_probe,
.remove = eqos_remove,eqos_open
eqos_init_phy
of_phy_connect(dev, pdata->phy_node,
&eqos_adjust_link, 0, pdata->interface);
关键是这个判断速率的函数:eqos_adjust_link
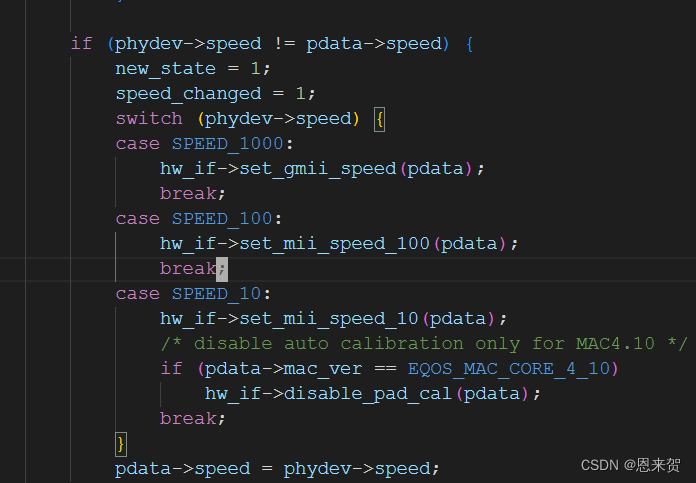
MAC配置100M,1000M hw_if->set_gmii_speedstatic INT set_gmii_speed(struct eqos_prv_data *pdata) { MAC_MCR_PS_WR(0); MAC_MCR_FES_WR(0); if (tegra_platform_is_unit_fpga()) CLK_CRTL0_TX_CLK_WR(0); return Y_SUCCESS; } ```c MAC配置100M:hw_if->set_mii_speed_100 ```c static INT set_mii_speed_100(struct eqos_prv_data *pdata) { MAC_MCR_PS_WR(0x1); MAC_MCR_FES_WR(0x1); if (tegra_platform_is_unit_fpga()) CLK_CRTL0_TX_CLK_WR(0); return Y_SUCCESS; } ```c MAC配置10M : ```c static INT set_mii_speed_10(struct eqos_prv_data *pdata) { MAC_MCR_PS_WR(0x1); MAC_MCR_FES_WR(0); if (tegra_platform_is_unit_fpga()) CLK_CRTL0_TX_CLK_WR(1); return Y_SUCCESS; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
#define MAC_MCR_PS_WR(data) do {\ ULONG v;\ MAC_MCR_RD(v);\ v = (v & (MAC_MCR_RES_WR_MASK_7))\ |(((0) & (MAC_MCR_MASK_7))<<7);\ v = ((v & MAC_MCR_PS_WR_MASK)\ |((data & MAC_MCR_PS_MASK)<<15));\ MAC_MCR_WR(v);\ } while (0)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
配置时钟速率
if (speed_changed) { hw_if->set_tx_clk_speed(pdata, phydev->speed); /* recalibrate if speed 10 to 100 or 1000mbps */ if (pdata->oldspeed == SPEED_10) hw_if->pad_calibrate(pdata); pdata->oldspeed = pdata->speed; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
static INT set_tx_clk_speed(struct eqos_prv_data *pdata, INT speed) { /* set eqos_tx clock to 125/25/2.5MHz based on speed */ if (tegra_platform_is_silicon()) { struct platform_device *pdev = pdata->pdev; int ret; ret = clk_set_rate(pdata->tx_clk, (speed == SPEED_10) ? 2500 * 1000 : (speed == SPEED_100) ? 25000 * 1000 : 125000 * 1000); if (ret) { dev_err(&pdev->dev, "failed to set tx_clk to %sMHz\n", (speed == SPEED_10) ? "2.5" : (speed == SPEED_100) ? "25" : "125"); return Y_FAILURE; } } return Y_SUCCESS; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
-
相关阅读:
Java中使用Jsoup实现网页内容爬取与Html内容解析并使用EasyExcel实现导出为Excel文件
EOFError: marshal data too short
基于ARM的字符串拷贝实验(嵌入式系统)
[附源码]Python计算机毕业设计Django校友社交系统
1.10.C++项目:仿muduo库实现并发服务器之Acceptor模块的设计
Vue项目实战之人力资源平台系统(七)员工管理模块
还在拿flex进行布局吗?快来试试grid网格布局吧
JDK动态代理
【网络安全】——sql注入之云锁bypass
设计模式-装饰器模式
- 原文地址:https://blog.csdn.net/enlaihe/article/details/125527360