-
从零实现深度学习框架——RNN从理论到实战【实战】
引言
本着“凡我不能创造的,我就不能理解”的思想,本系列文章会基于纯Python以及NumPy从零创建自己的深度学习框架,该框架类似PyTorch能实现自动求导。
要深入理解深度学习,从零开始创建的经验非常重要,从自己可以理解的角度出发,尽量不使用外部完备的框架前提下,实现我们想要的模型。本系列文章的宗旨就是通过这样的过程,让大家切实掌握深度学习底层实现,而不是仅做一个调包侠。
上篇文章中,我们学习了RNN的理论部分,本文来看如何实现它,包括堆叠RNN和双向RNN。从而理解它们的原理。最后看一个应用到词性标注任务的实战。
RNNCell
首先实现单时间步RNN计算类,这是一个公共类:
class RNNCell(Module): def __init__(self, input_size, hidden_size: int, bias: bool = True, nonlinearity: str = 'tanh') -> None: ''' RNN单时间步的抽象 :param input_size: 输入x的特征数 :param hidden_size: 隐藏状态的特征数 :param bias: 线性层是否包含偏置 :param nonlinearity: 非线性激活函数 tanh | relu ''' super(RNNCell, self).__init__() # 输入x的线性变换 self.input_trans = Linear(input_size, hidden_size, bias=bias) # 隐藏状态的线性变换 self.hidden_trans = Linear(hidden_size, hidden_size, bias=bias) if nonlinearity == 'tanh': self.activation = F.tanh else: self.activation = F.relu def forward(self, x: Tensor, h: Tensor) -> Tensor: ''' 单个RNN的前向传播 :param x: 形状 [batch_size, input_size] :param h: 形状 [batch_size, hidden_size] :return: ''' # [batch_size, input_size] x [input_size, hidden_size] + [batch_size, hidden_size] x [hidden_size, hidden_size] # = [batch_size, hidden_size] h_next = self.activation(self.input_trans(x) + self.hidden_trans(h)) return h_next- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
激活函数支持
tanh和relu,这只是单时间步的RNN计算,RNN模型就是基于它来实现的。RNN
下面来实现简单RNN。
class RNN(Module): def __init__(self, input_size: int, hidden_size: int, batch_first: bool = False, num_layers: int = 1, nonlinearity: str = 'tanh', bias: bool = True, dropout: float = 0) -> None: ''' :param input_size: 输入x的特征数 :param hidden_size: 隐藏状态的特征数 :param batch_first: :param num_layers: 层数 :param nonlinearity: 非线性激活函数 tanh | relu :param bias: 线性层是否包含偏置 :param dropout: 用于多层堆叠RNN,默认为0代表不使用dropout ''' super(RNN, self).__init__() self.num_layers = num_layers self.hidden_size = hidden_size self.batch_first = batch_first # 支持多层 self.cells = ModuleList([RNNCell(input_size, hidden_size, bias, nonlinearity)] + [RNNCell(hidden_size, hidden_size, bias, nonlinearity) for _ in range(num_layers - 1)]) self.dropout = dropout if dropout: # Dropout层 self.dropout_layer = Dropout(dropout)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
从参数可以看到,我们支持多层RNN,同时在多层RNN之间经过了一层Dropout。
def forward(self, input: Tensor, h_0: Tensor) -> Tuple[Tensor, Tensor]: ''' RNN的前向传播 :param input: 形状 [n_steps, batch_size, input_size] 若batch_first=False :param h_0: 形状 [num_layers, batch_size, hidden_size] :return: output: (n_steps, batch_size, hidden_size)若batch_first=False 或 (batch_size, n_steps, hidden_size)若batch_first=True h_n: (num_layers, batch_size, hidden_size) ''' is_batched = input.ndim == 3 batch_dim = 0 if self.batch_first else 1 if not is_batched: # 转换为批大小为1的输入 input = input.unsqueeze(batch_dim) if h_0 is not None: h_0 = h_0.unsqueeze(1) if self.batch_first: batch_size, n_steps, _ = input.shape input = input.transpose((1, 0, 2)) # 将batch放到中间维度 else: n_steps, batch_size, _ = input.shape if h_0 is None: h = [Tensor.zeros((batch_size, self.hidden_size), device=input.device) for _ in range(self.num_layers)] else: h = h_0 h = list(F.unbind(h)) # 按层数拆分h output = [] for t in range(n_steps): inp = input[t] for layer in range(self.num_layers): h[layer] = self.cells[layer](inp, h[layer]) inp = h[layer] if self.dropout and layer != self.num_layers - 1: inp = self.dropout_layer(inp) # 收集最终层的输出 output.append(h[-1]) output = F.stack(output) if self.batch_first: output = output.transpose((1, 0, 2)) h_n = F.stack(h) return output, h_n- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
为了简化实现,将batch维度放到维度
1。由于包含多层,每层含有不同的隐藏状态,所以需要按层数来拆分
h。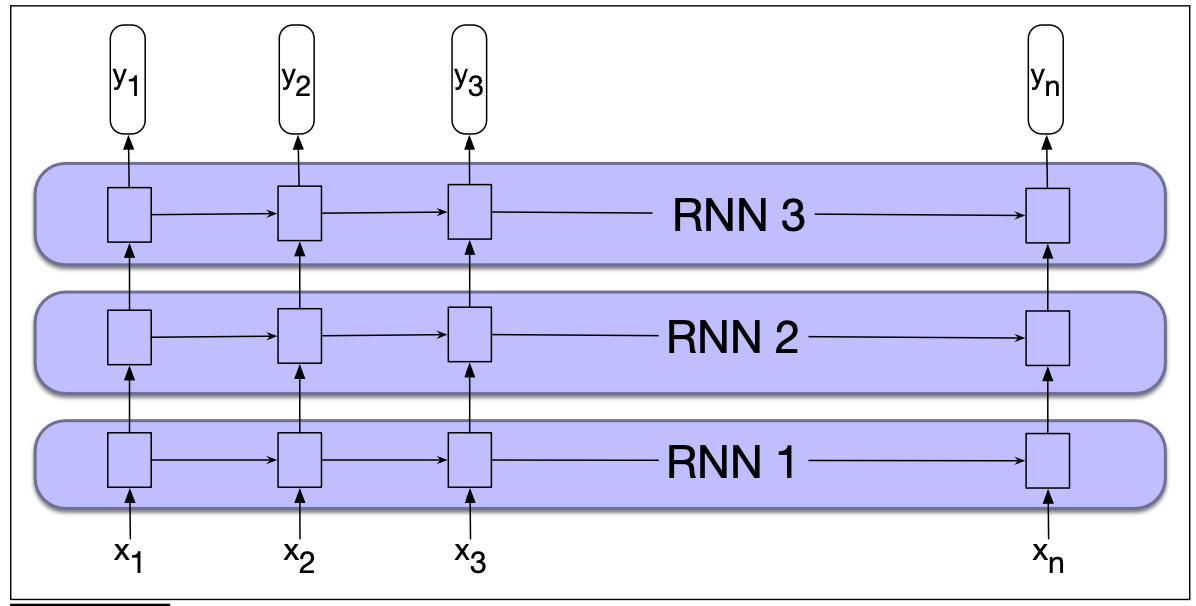
多层的情况下,需要在合适的位置增加Dropout。比如上图的例子中,在RNN1和RNN2以及RNN2和RNN3的连接处增加Dropout。
双向RNN
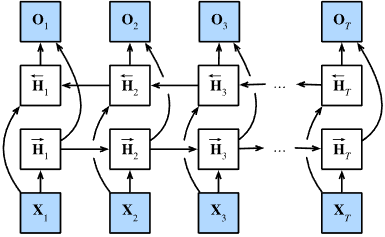
双向RNN其实就是多了另一个反方向处理的RNN,因此我们首先增加新的用于处理反序输入的RNN:
# 支持多层 self.cells = ModuleList([RNNCell(input_size, hidden_size, bias, nonlinearity)] + [RNNCell(hidden_size, hidden_size, bias, nonlinearity) for _ in range(num_layers - 1)]) if self.bidirectional: # 支持双向 self.back_cells = copy.deepcopy(self.cells)- 1
- 2
- 3
- 4
- 5
- 6
最简单的方法,就是将输入逆序,然后依照正向过程重新,重新跑一遍反向RNN过程。但这样会有重复代码,因此我们把RNN沿着某个方向的运算过程抽成一个函数。
def forward(self, input: Tensor, h_0: Tensor) -> Tuple[Tensor, Tensor]: ''' RNN的前向传播 :param input: 形状 [n_steps, batch_size, input_size] 若batch_first=False :param h_0: 形状 [num_layers, batch_size, hidden_size] :return: num_directions = 2 if self.bidirectional else 1 output: (n_steps, batch_size, num_directions * hidden_size)若batch_first=False 或 (batch_size, n_steps, num_directions * hidden_size)若batch_first=True 包含每个时间步最后一层(多层RNN)的输出h_t h_n: (num_directions * num_layers, batch_size, hidden_size) 包含最终隐藏状态 ''' is_batched = input.ndim == 3 batch_dim = 0 if self.batch_first else 1 if not is_batched: # 转换为批大小为1的输入 input = input.unsqueeze(batch_dim) if h_0 is not None: h_0 = h_0.unsqueeze(1) if self.batch_first: batch_size, n_steps, _ = input.shape input = input.transpose((1, 0, 2)) # 将batch放到中间维度 else: n_steps, batch_size, _ = input.shape if h_0 is None: num_directions = 2 if self.bidirectional else 1 h = Tensor.zeros((self.num_layers * num_directions, batch_size, self.hidden_size), dtype=input.dtype, device=input.device) else: h = h_0 hs = list(F.unbind(h)) # 按层数拆分h if not self.bidirectional: # 如果是单向的 output, h_n = one_directional_op(input, self.cells, n_steps, hs, self.num_layers, self.dropout_layer, self.batch_first) else: output_f, h_n_f = one_directional_op(input, self.cells, n_steps, hs[:self.num_layers], self.num_layers, self.dropout_layer, self.batch_first) output_b, h_n_b = one_directional_op(F.flip(input, 0), self.back_cells, n_steps, hs[self.num_layers:],self.num_layers, self.dropout_layer, self.batch_first, reverse=True) output = F.cat([output_f, output_b], 2) h_n = F.cat([h_n_f, h_n_b], 0) return output, h_n- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
我们这里输出的维度和PyTorch保持一致。那么其中的
one_directional_op是怎么实现的呢?def one_directional_op(input, cells, n_steps, hs, num_layers, dropout, batch_first, reverse=False): ''' 单向RNN运算 Args: input: [n_steps, batch_size, input_size] cells: n_steps: hs: num_layers: dropout: batch_first: reverse: Returns: ''' output = [] for t in range(n_steps): inp = input[t] for layer in range(num_layers): hs[layer] = cells[layer](inp, hs[layer]) inp = hs[layer] if dropout and layer != num_layers - 1: inp = dropout(inp) # 收集最终层的输出 output.append(hs[-1]) output = F.stack(output) if reverse: output = F.flip(output, 0) # if batch_first: output = output.transpose((1, 0, 2)) h_n = F.stack(hs) return output, h_n- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
这里要注意的是
output = F.flip(output, 0)` 将输出按时间步维度逆序,使得时间步t=0上,是看了整个序列的结果。最后我们通过词性标注任务实战来应用我们的RNN。
词性标注实战
词性标注任务可以看成是多类别文本分类问题,我们使用NLTK提供的宾州树库(Penn Treebank)样例数据,首先加载词性标注语料库:
def load_treebank(): from nltk.corpus import treebank sents, postags = zip(*(zip(*sent) for sent in treebank.tagged_sents())) vocab = Vocabulary.build(sents, reserved_tokens=["<pad>"]) tag_vocab = Vocabulary.build(postags) train_data = [(vocab.to_ids(sentence), tag_vocab.to_ids(tags)) for sentence, tags in zip(sents[:3000], postags[:3000])] test_data = [(vocab.to_ids(sentence), tag_vocab.to_ids(tags)) for sentence, tags in zip(sents[3000:], postags[3000:])] return train_data, test_data, vocab, tag_vocab- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
我们采用前3000句作为训练数据,其余的作为测试数据。然后实现我们的数据集类:
class RNNDataset(Dataset): def __init__(self, data): self.data = np.asarray(data) def __len__(self): return len(self.data) def __getitem__(self, i): return self.data[i] @staticmethod def collate_fn(examples): inputs = [Tensor(ex[0]) for ex in examples] targets = [Tensor(ex[1]) for ex in examples] inputs = pad_sequence(inputs) targets = pad_sequence(targets) mask = inputs.data != 0 return inputs, targets, Tensor(mask)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
为了对齐批次内数据的长度,需要对输入序列和输出序列进行补齐,同时用
mask记录了哪些是经过补齐的标记。然后基于我们上面实现的RNN来实现该词性标注分类模型,这里同样也叫RNN:
class RNN(nn.Module): def __init__(self, vocab_size: int, embedding_dim: int, hidden_dim: int, output_dim: int, n_layers: int, dropout: float, bidirectional: bool = False): super(RNN, self).__init__() self.embedding = nn.Embedding(vocab_size, embedding_dim) # 调用我们模型库中的RNN self.rnn = nn.RNN(embedding_dim, hidden_dim, batch_first=True, num_layers=n_layers, dropout=dropout, bidirectional=bidirectional) num_directions = 2 if bidirectional else 1 self.output = nn.Linear(num_directions * hidden_dim, output_dim) def forward(self, input: Tensor, hidden: Tensor = None) -> Tensor: embeded = self.embedding(input) output, _ = self.rnn(embeded, hidden) # pos tag任务利用的是包含所有时间步的output outputs = self.output(output) log_probs = F.log_softmax(outputs, axis=-1) return log_probs- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
这里在序列标注任务中,需要使用序列全部状态的隐藏层,存储在变量
output中。最后,在训练和预测阶段,需要使用
mask来保证仅对有效标记求损失、对正确预测结果以及总的标记计数。训练代码如下:
embedding_dim = 128 hidden_dim = 128 batch_size = 32 num_epoch = 10 n_layers = 2 dropout = 0.2 # 加载数据 train_data, test_data, vocab, pos_vocab = load_treebank() train_dataset = RNNDataset(train_data) test_dataset = RNNDataset(test_data) train_data_loader = DataLoader(train_dataset, batch_size=batch_size, collate_fn=train_dataset.collate_fn, shuffle=True) test_data_loader = DataLoader(test_dataset, batch_size=batch_size, collate_fn=test_dataset.collate_fn, shuffle=False) num_class = len(pos_vocab) # 加载模型 device = cuda.get_device("cuda:0" if cuda.is_available() else "cpu") model = RNN(len(vocab), embedding_dim, hidden_dim, num_class, n_layers, dropout, bidirectional=True) model.to(device) # 训练过程 nll_loss = NLLLoss() optimizer = SGD(model.parameters(), lr=0.1) model.train() # 确保应用了dropout for epoch in range(num_epoch): total_loss = 0 for batch in tqdm(train_data_loader, desc=f"Training Epoch {epoch}"): inputs, targets, mask = [x.to(device) for x in batch] log_probs = model(inputs) loss = nll_loss(log_probs[mask], targets[mask]) # 通过bool选择,mask部分不需要计算 optimizer.zero_grad() loss.backward() optimizer.step() total_loss += loss.item() print(f"Loss: {total_loss:.2f}") # 测试过程 acc = 0 total = 0 model.eval() # 不需要dropout for batch in tqdm(test_data_loader, desc=f"Testing"): inputs, targets, mask = [x.to(device) for x in batch] with no_grad(): output = model(inputs) acc += (output.argmax(axis=-1).data == targets.data)[mask.data].sum().item() total += mask.sum().item() # 输出在测试集上的准确率 print(f"Acc: {acc / total:.2f}")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
我们通过
model.train()来model.eval()来控制需不需要进行Dropout。最终,在双向RNN中训练了10个批次,结果为:Training Epoch 9: 94it [02:00, 1.29s/it] Loss: 103.25 Testing: 29it [00:05, 5.02it/s] Acc: 0.70- 1
- 2
- 3
- 4
由于电脑上没有GPU,因此速度较慢,就只训练了10个批次,看起来效果还不错,测试集上的准确率达到了70%。
完整代码
https://github.com/nlp-greyfoss/metagrad
参考
- Speech and Language Processing
- 自然语言处理:基于预训练模型的方法
- https://nn.labml.ai/lstm/index.html
-
相关阅读:
Linux tar命令最佳实践《Linux零基础实战》
哪里有期货开户的正规途径?
数字孪生赋能实景三维中国建设分论坛成功举办
python在centos下安装以及配置
ELA--学习笔记
【Java I/O 流】对象流:ObjectInputStream 和 ObjectOutputStream
【机器学习】线性分类【下】经典线性分类算法
基于随机森林、svm、CNN机器学习的风控欺诈识别模型
crp Week1周报
3D漫游:所见即所得的形式,构建线上数字展厅
- 原文地址:https://blog.csdn.net/yjw123456/article/details/125494068
