-
Proteus软件初学笔记
文章目录
Proteus软件初学
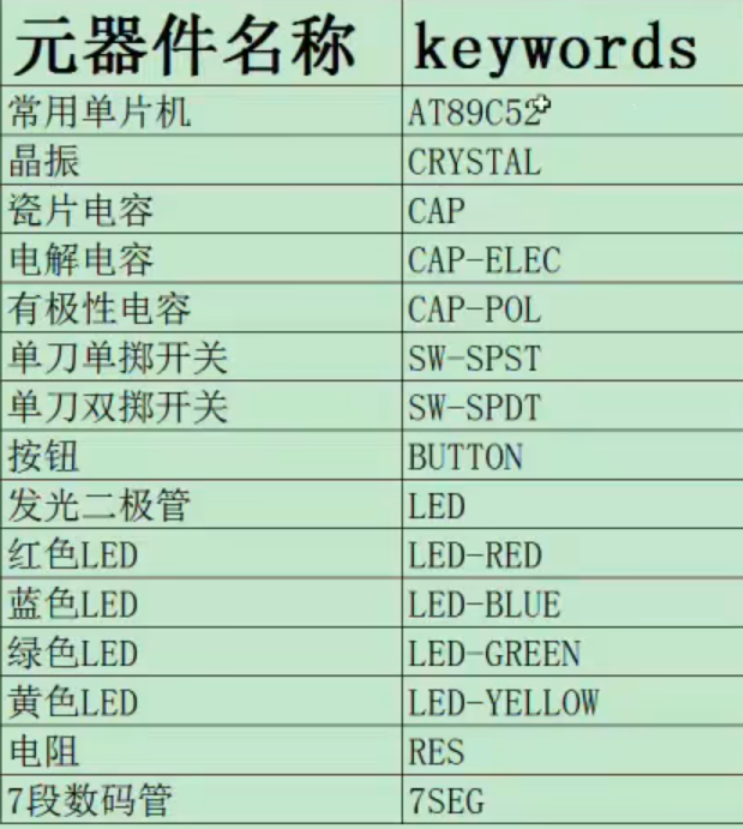
一、常用元器件
二、学习视频
Proteus使用教程可以查看该视频链接,我觉得讲的挺好的:https://www.bilibili.com/video/BV1Y7411N7YK?p=2
Keil5 结合Proteus 的使用可以看一下该视频:
https://www.bilibili.com/video/BV1H7411n7AY?p=4&spm_id_from=pageDriver
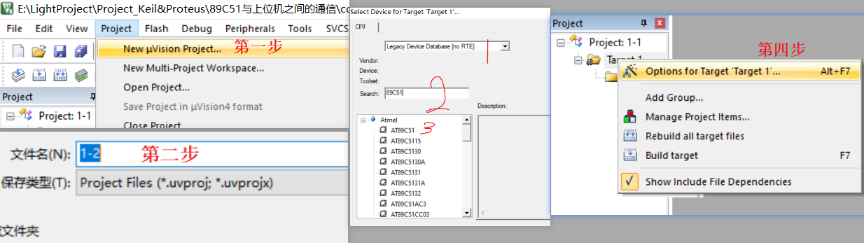
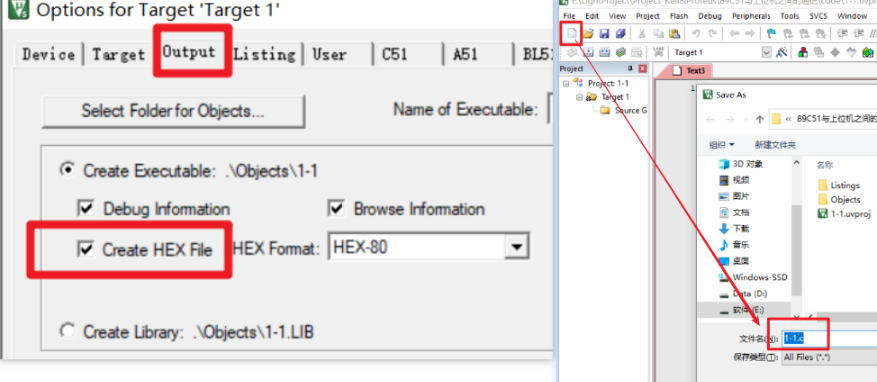
三、Project
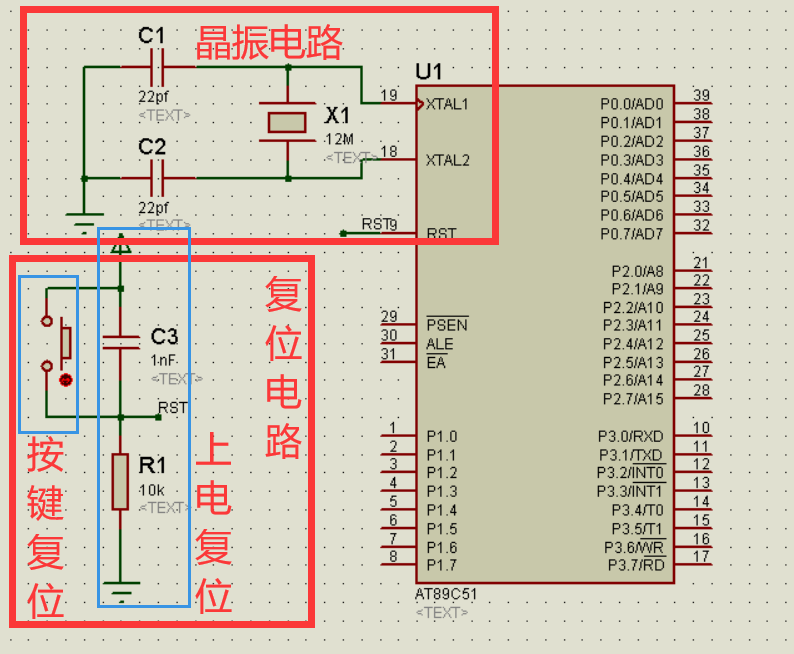
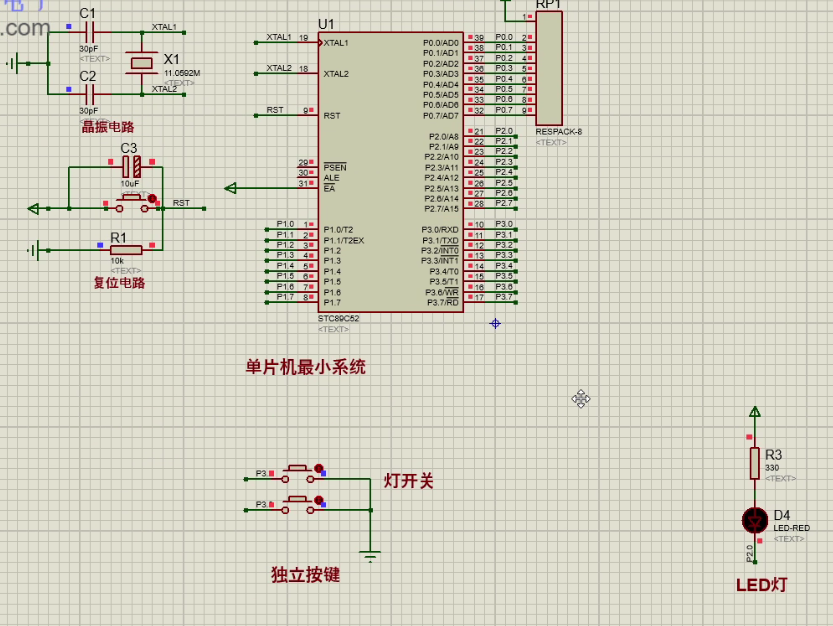
1、晶振电路和复位电路
时钟电路
- 芯片:AYM89C51
- 晶振:CRY,12M
- 电容:CAP,22pf
- 作用:晶振电路是给单片机提供时钟信号的。晶振电路产生单片机必须要用到的时钟频率,单片机发送的所有指令都是建立在这个基础上的
- 晶振的时钟频率越高,单片机的运行速度越快。它是一条条的从ROM中获取指令,然后再去执行。单片机每访问一次存储的时间叫做机器周期,机器周期又被分为12个时钟周期
复位电路:上电复位,按键复位
- 电阻:RES
- 作用:利用它把电路恢复到起始状态,像计算器的清零按钮的作用一样,以便回到原始状态,重新进行计算。
2、LED流水灯的实现
2.1、LED原理
LED,选带ACTIVE的,可以看得到元器件的可视化,是亮还是灭
电流方向:P ----> N
如果是硅,0.7V,如果是锗,0.3V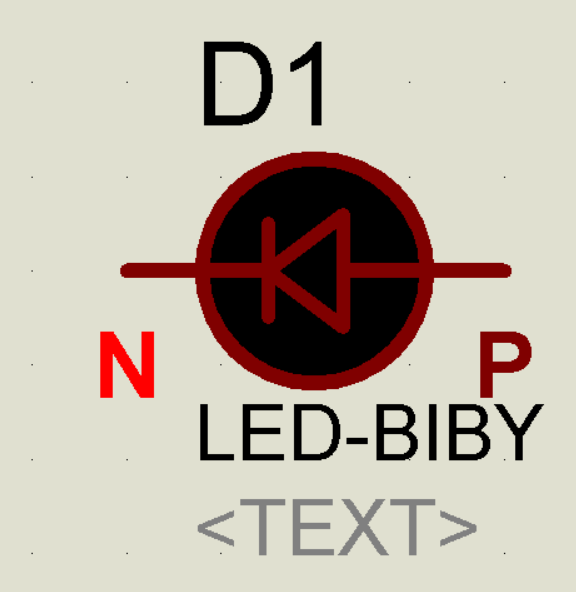
2.2、供阳极接法和供阴极接法
供阳极接法:将所有LED的P极接一起,此时N极需要接低电平,低电平亮,高电平灭,低电平有效
供阴极接法:将所有LED的N极接一起,此时P极需要接高电平,高电平有效
单片机可以吸入的电流为20mA,所以阳极接法需要有电阻(电阻阻值不得小于250)才能与单片机相连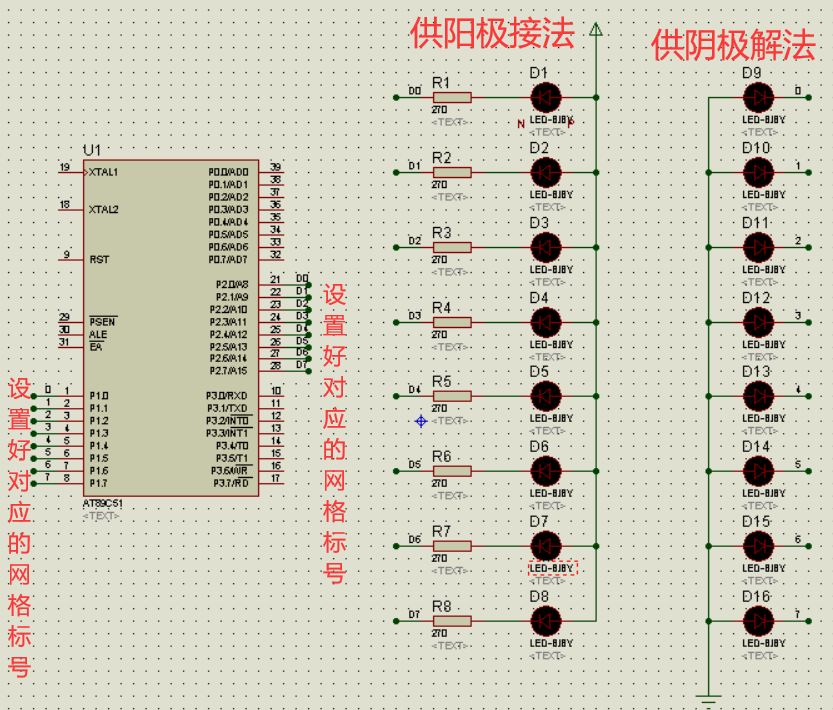
2.3、呼吸灯实现闪烁的代码
#include"reg51.h" // sbit 表示对位进行控制 sbit LED0 = P2^0; /* * 延时函数 * 延时函数`delay()`的本质:通过空语句占用程序的时间,从而达到延时的效果 */ void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } void main() { while(1) { LED0 = 0;//亮 delay(5);//加入延时函数 LED0 = 1;//灭 delay(5);//加入延时函数 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
2.4、呼吸灯实现代码(供阳极和供阴极接法)
#include"reg51.h" // sbit 表示对位进行控制 sbit LED0 = P2^0; /* * 延时函数 */ void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } /* * 实现流水灯效果 */ void led() { int i=0; for(i=0;i<8;i++) { /* * 因为是低电平亮,所以进行取反操作, * 因为实现流水灯操作,所以进行移位操作 * P2 为供阳极接法 * P1 为供阴极接法 */ P2=~(0x01<<i);//~0000 0001 ->0000 0010 -> 0000 0100 P1=(0x01<<i);//~0000 0001 ->0000 0010 -> 0000 0100 delay(50); } } void main() { while(1) { led(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
2.5、通用流水灯的操作
将输出的数据用数组进行表示,用 for循环将其遍历出来
代码如下:#include"reg51.h" // 轮流滚动的小灯数据 unsigned char leddat[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } void led() { int i=0; for(i=0;i<8;i++) { P2=~leddat[i]; delay(100); } } void main() { // 保证程序能够不断运行 while(1) { led(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
2.6、实现花式流水灯效果
#include"reg51.h" unsigned char leddat[50]={ 0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x81,0x82, 0x84,0x88,0x90,0xA0,0xC0,0xC1,0xC2,0xC4,0xC8,0xD0, 0xE0,0xE1,0xE2,0xE4,0xE8,0xF0,0xF1,0xF2,0xF4,0xF8, 0xF9,0xFA,0xFC,0xFD,0xFE,0xFF,0xFF,0x00,0xFF,0x00 }; /*延迟函数 */ void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } void led() { int i=0; for(i=0;i<50;i++) { P2 = ~leddat[i]; delay(100); } } void main() { while(1) { led(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
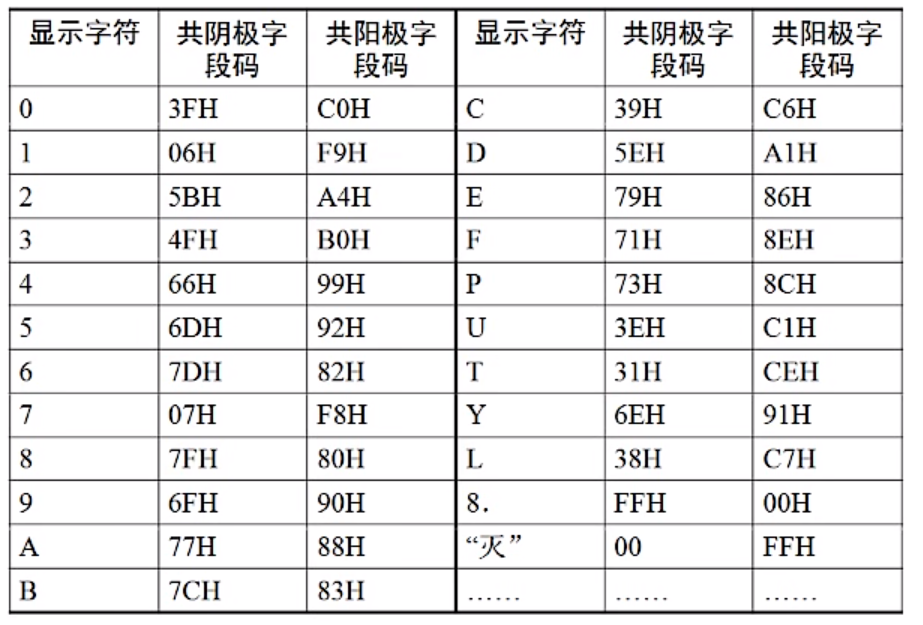
3、数码管
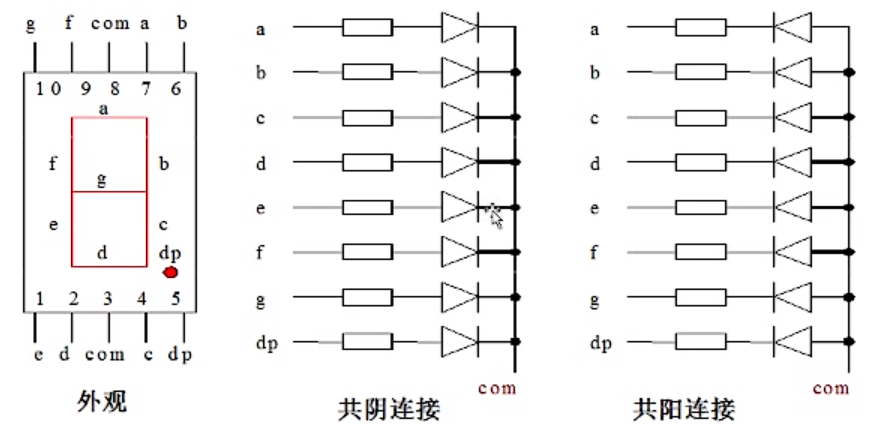
3.1、数码管的结构和原理
3.2、数码管上显示字母和数字
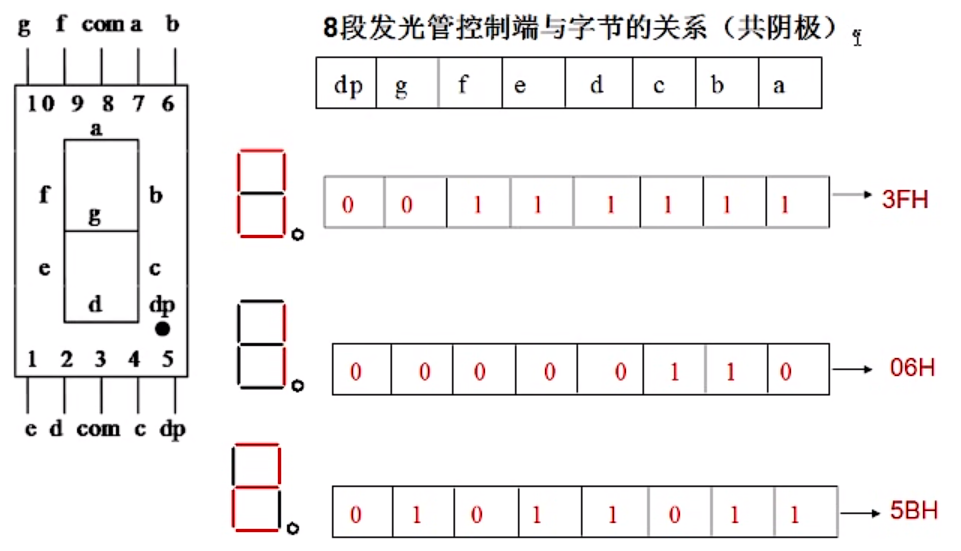
- dp:是小数点位置
3.3、LED数码管的静态显示和动态显示
1、静态显示方式
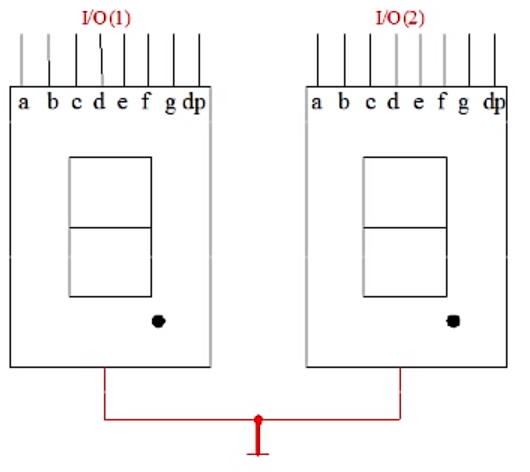
2、特点
- 公共端直接接地(供阴极)或接电源(供阳极)
- 每个数码的段选线与一组 I/O 接口线相连
- 每个数码管一直显示
3、实现效果 :从0–9反复变化的电路图
以阴极接法为例
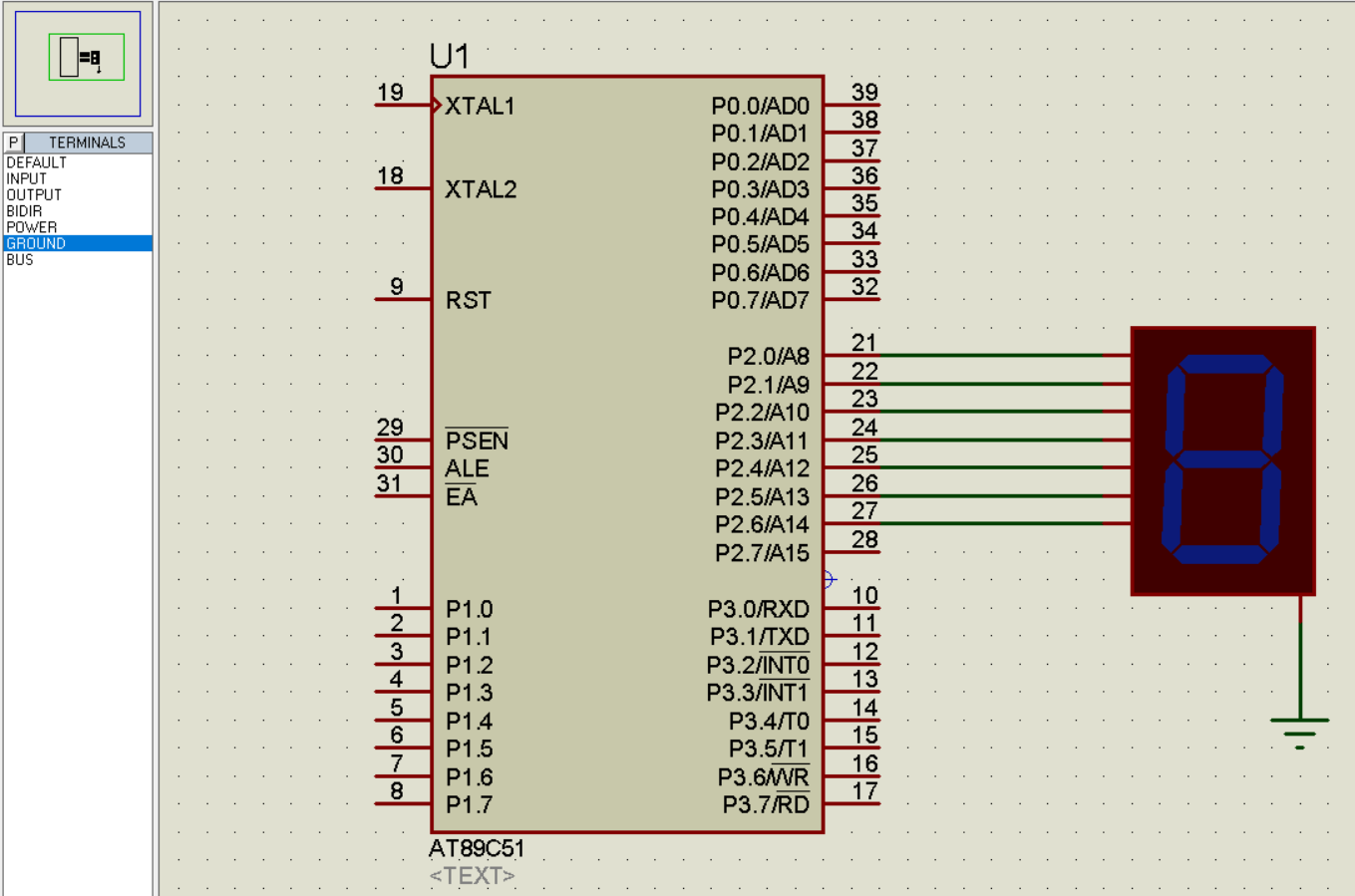
4、代码
#include"reg51.h" unsigned char s[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};// 供阴0--9 /* * 延迟函数 */ void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } /* * 显示函数 */ void seg() { //P2 = 0x3F;//0011 1111 int i =0; for(i=0;i<10;i++) { P2 = s[i]; delay(300); } } void main() { while(1) { seg(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
注意:供阳极接法同上,需要更换的是数码管,接法以及代码中的取反
3.4、LED数码管的动态显示
1、原理
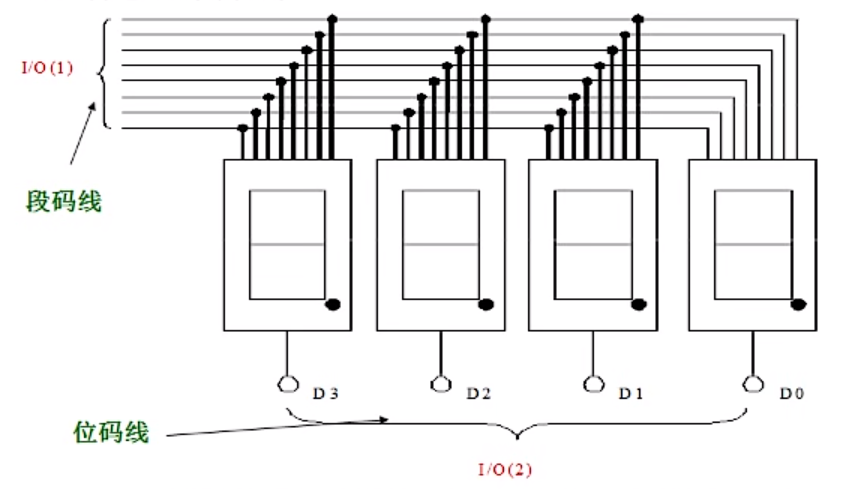
- 特点
- 从下到上依次为:a,b,c,d,e,f,g,db
- 所有数码管的段选线与一组 I/O 接口线并连在一起
- 每个数码管的公共端由一根 I/O 线控制
- 显示为逐个显示
2、实现效果
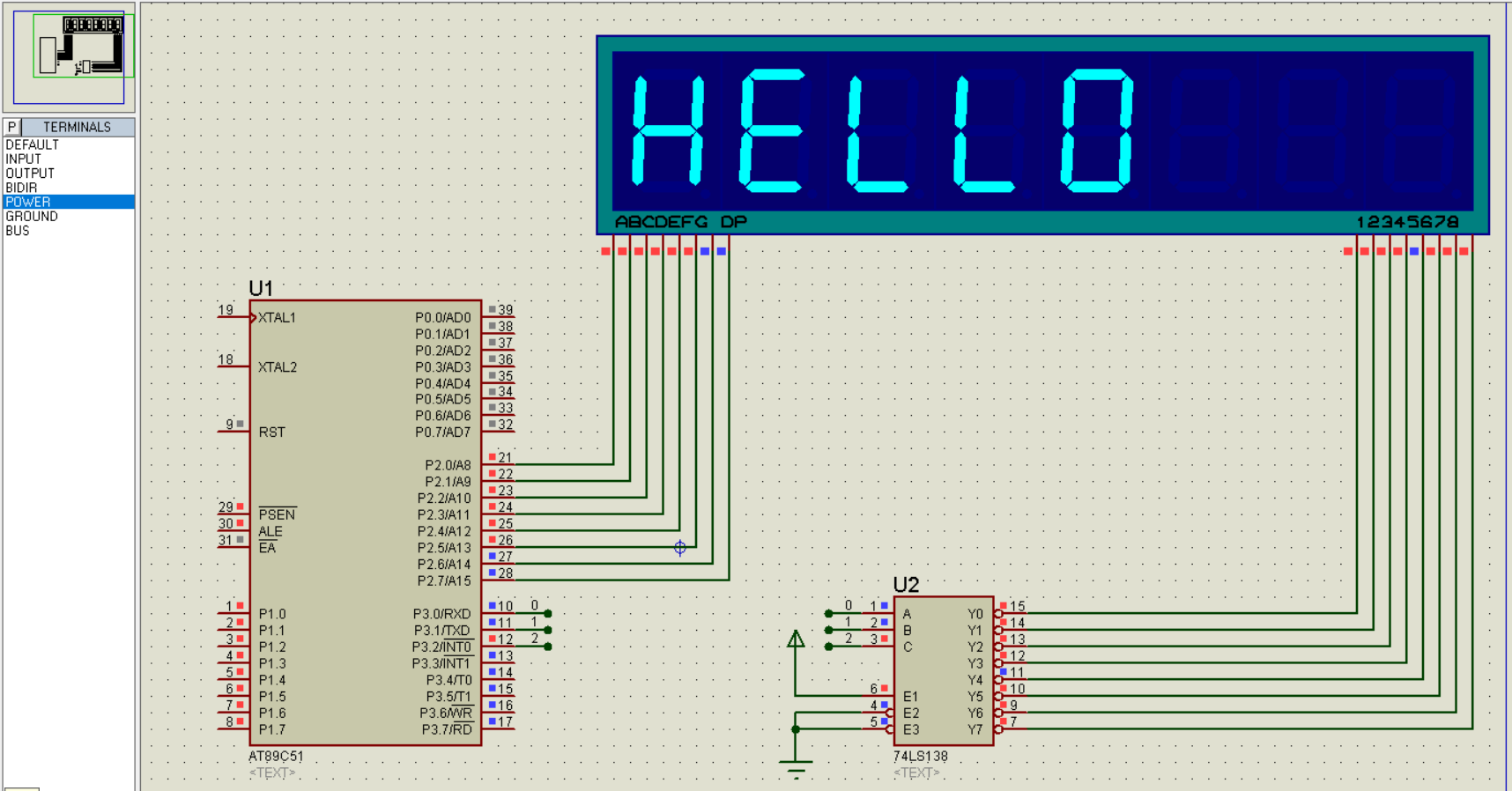
3、代码
#include"reg51.h" unsigned char s[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};// 供阴0--9 unsigned char str[]={0x76,0x79,0x38,0x38,0x3F};// HELLO unsigned char wei[]={0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07};//显示不同的位 // 若将显示器1-8直接与单片机10-17连接,显示不同的位使用以下这种 // unsigned char wei[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; /* * 延迟函数 */ void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } /* * 显示函数 */ void seg() { //P2 = 0x3F;//0011 1111 int i =0; for(i=0;i<5;i++) { P3=wei[i]; P2 = str[i];//0011 1111 delay(5); } } void main() { while(1) { seg(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
4、按键
4.1、键盘的基本原理
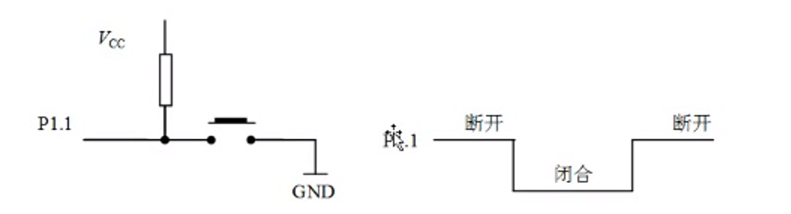
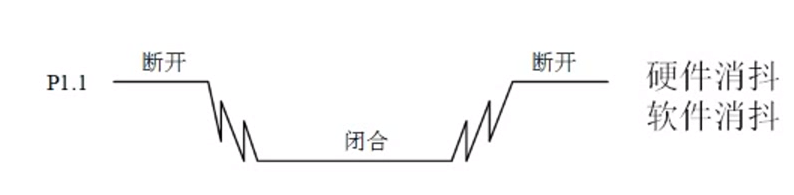
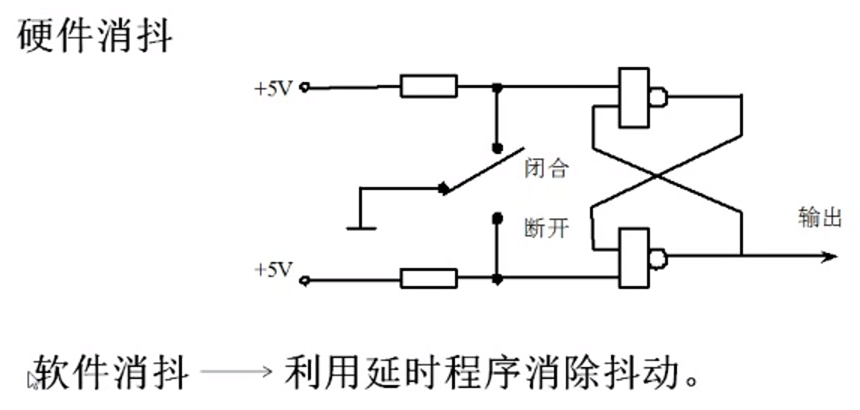
4.2、抖动的消除
抖动大概10ms~20ms
4.3、键盘的分类
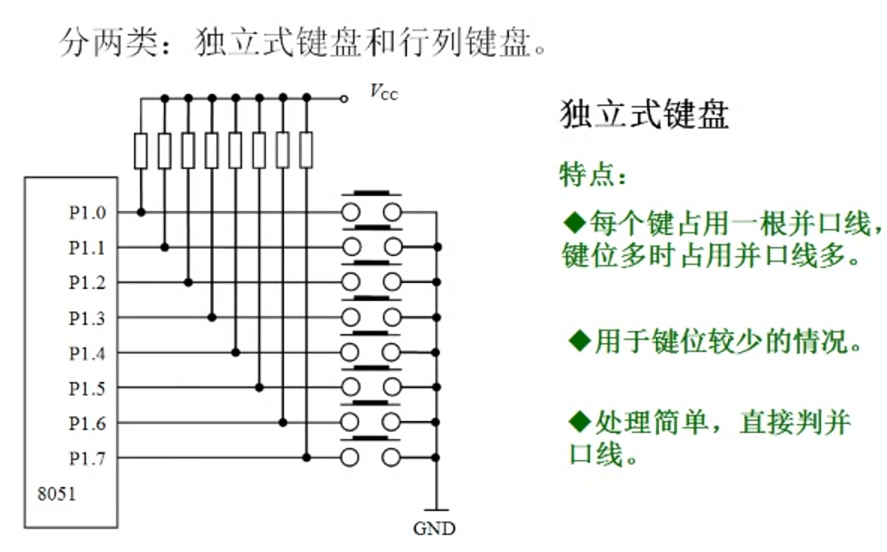
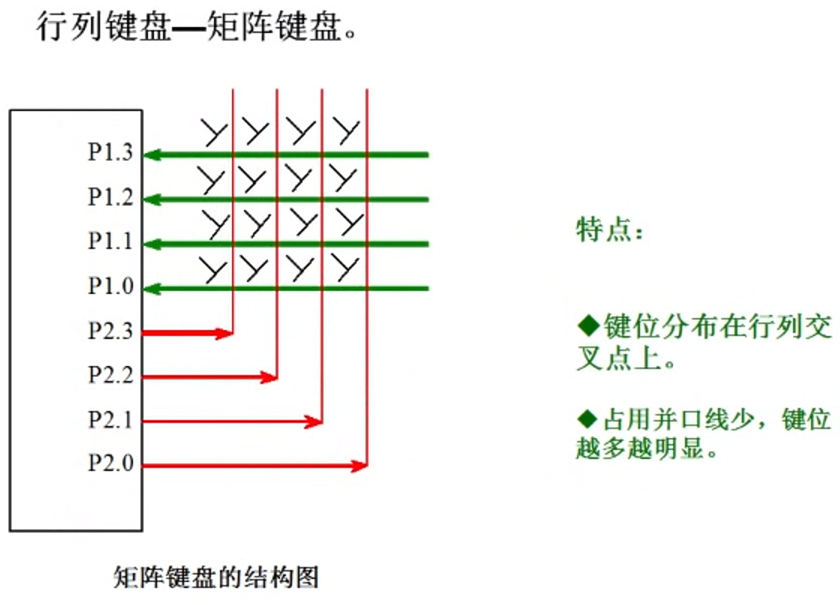
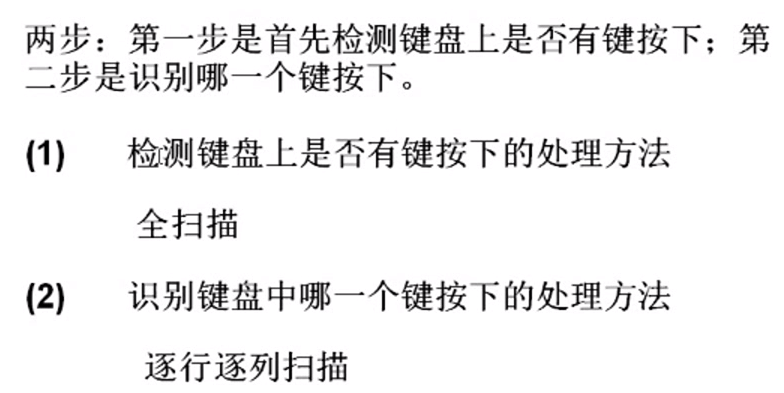
4.4、矩阵键盘键位的识别
4.5、实现效果
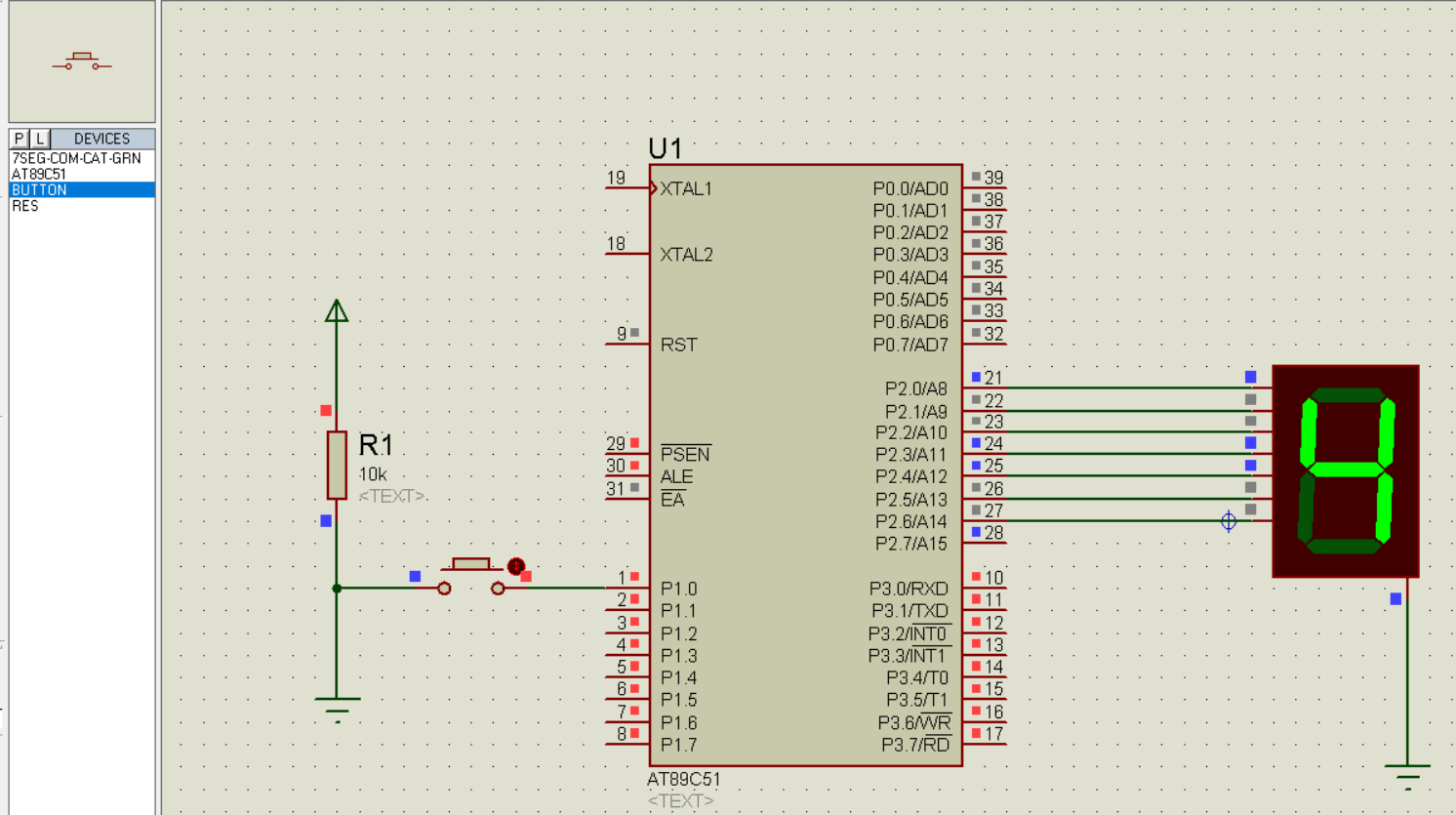
代码
#include"reg51.h" sbit key0=P1^0; unsigned char s[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};// 供阴0--9 unsigned char num=0,flag=0; void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } // 按键操作 void key() { // if(key0==0) // { // num++; // } if(key0==0&&flag==0) { flag=1; } if(flag==1&&key0==1) { num++; flag=0; } } // 数码管操作,利用标志位消除抖动 void seg() { P2=s[num]; if(num==10) { num=0; } } void main() { while(1) { key(); seg(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
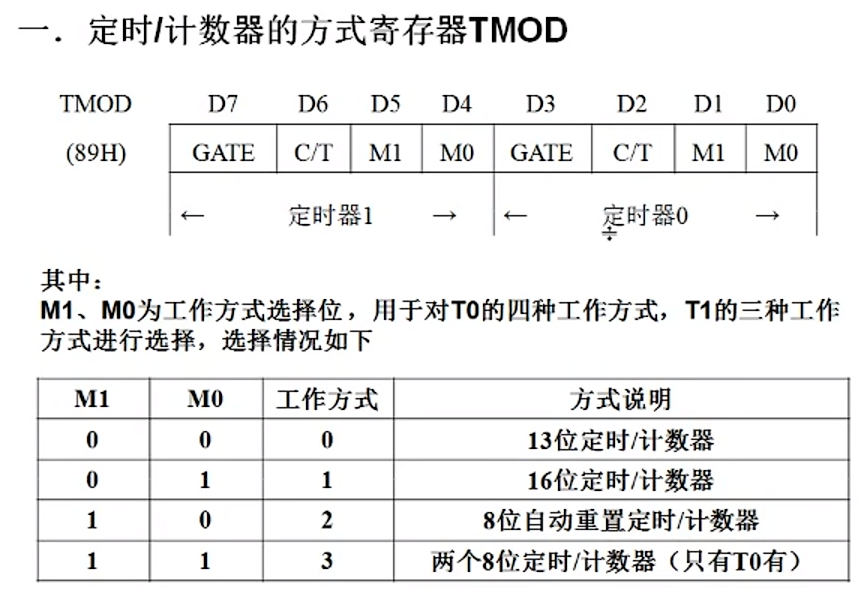
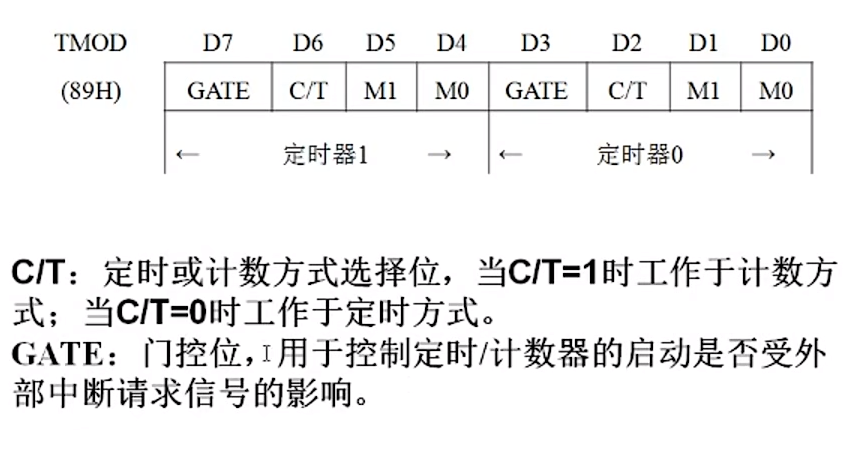
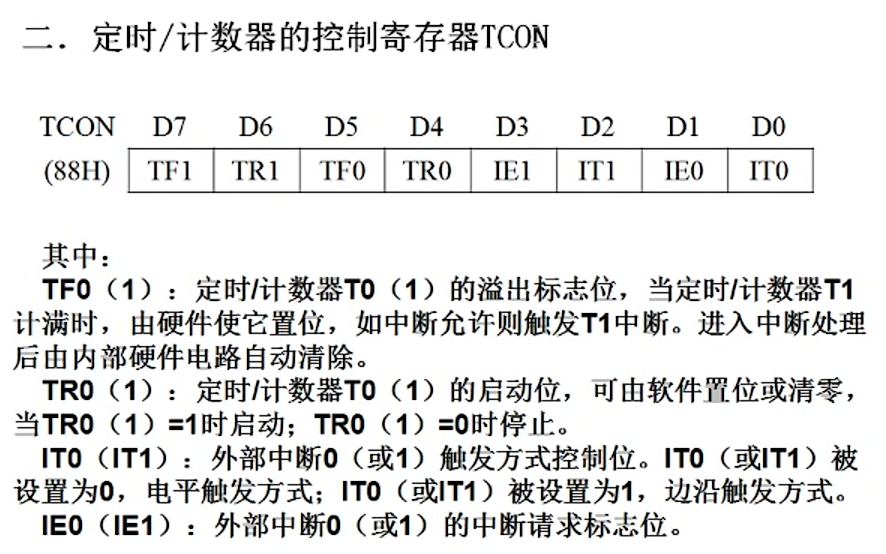
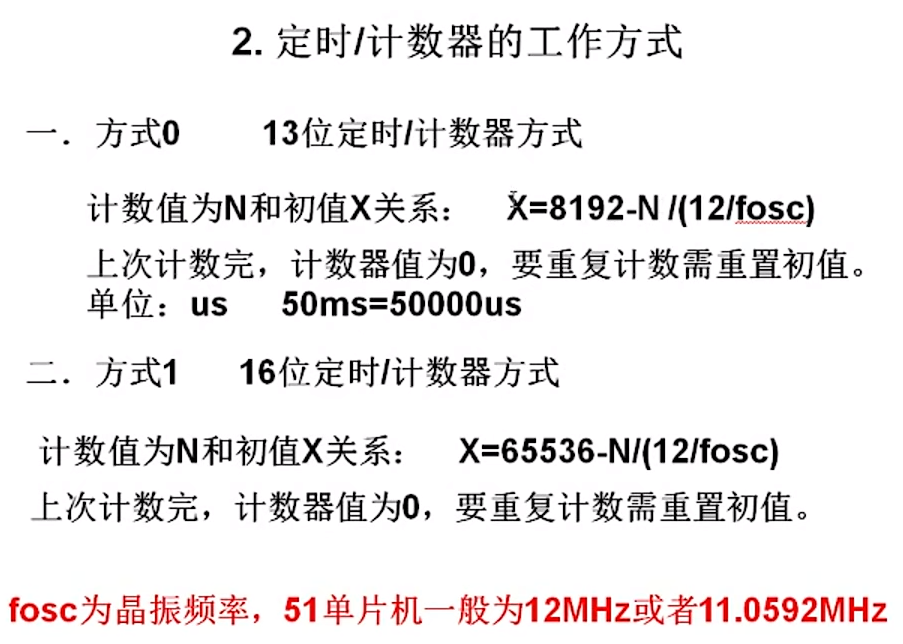
5、定时器
5.1、定时/计数器的方式和控制寄存器
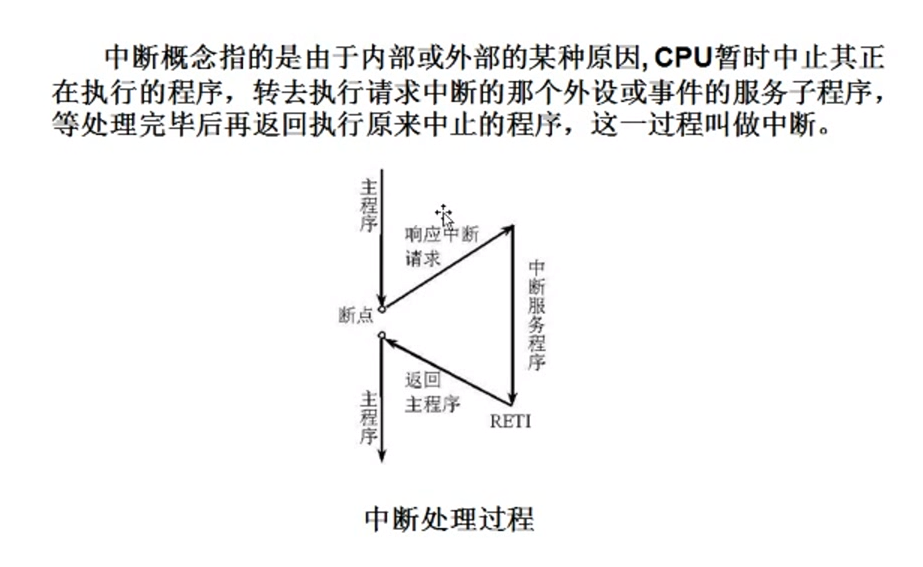
6、中断
6.1、中断简介
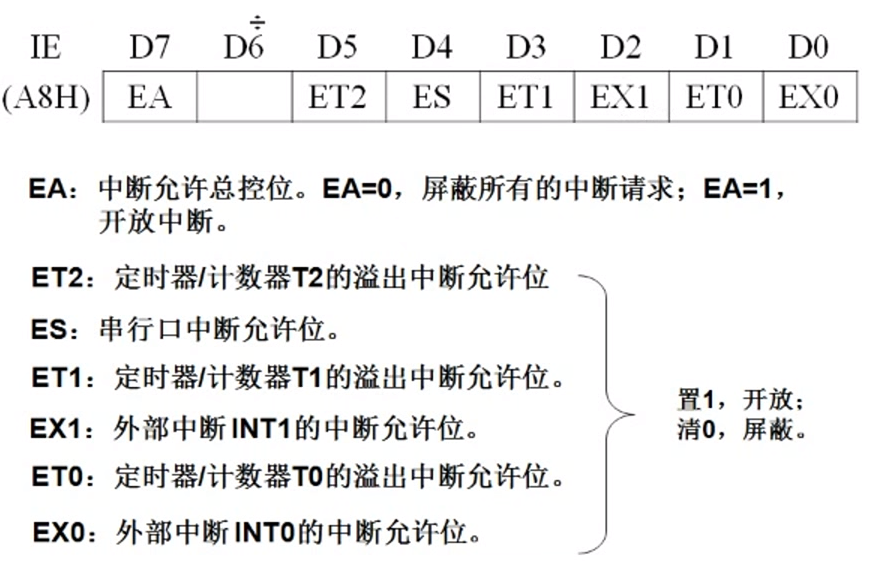
6.2、中断允许控制
标识中带
T的表示与定时器有关
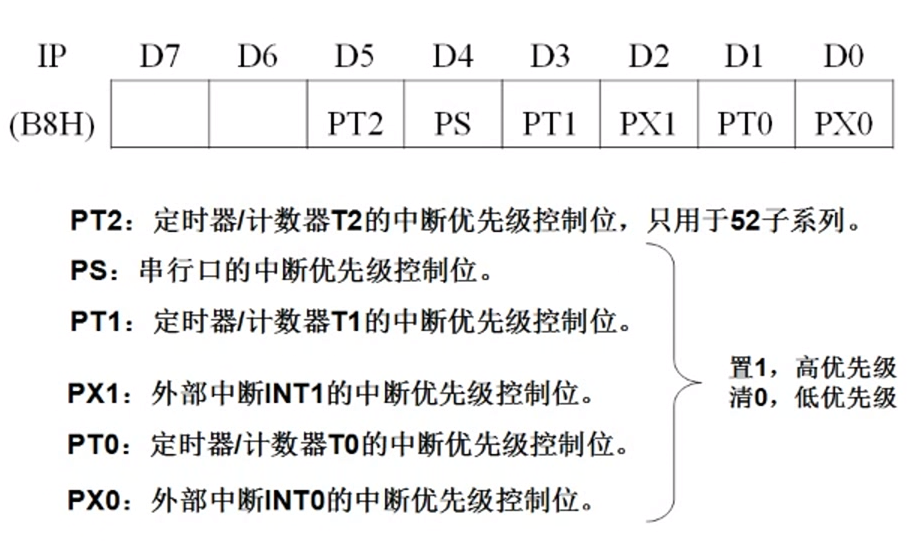
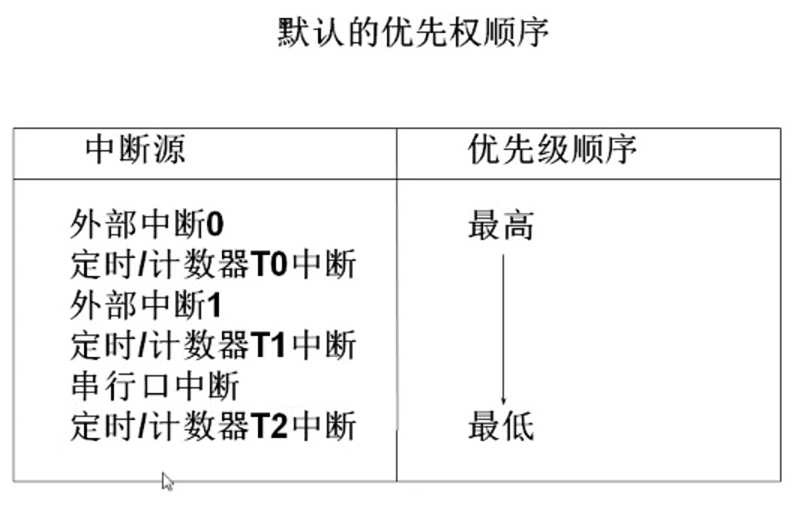
6.3、优先权控制
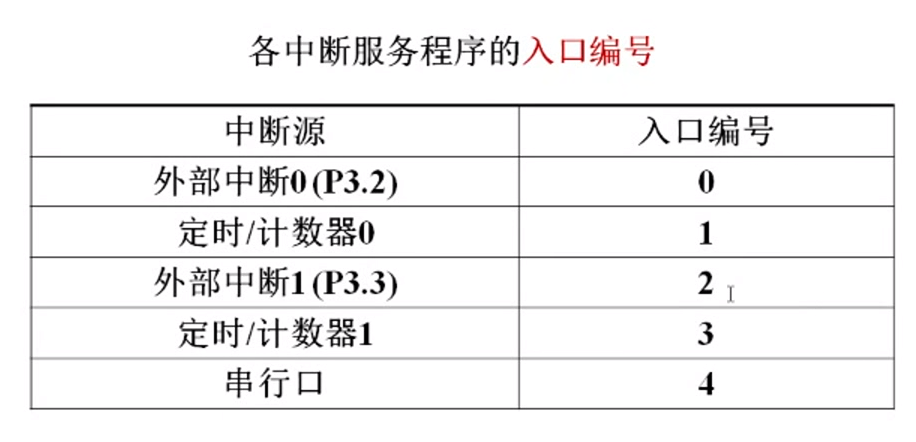
6.4、各中断服务程序的入口编号
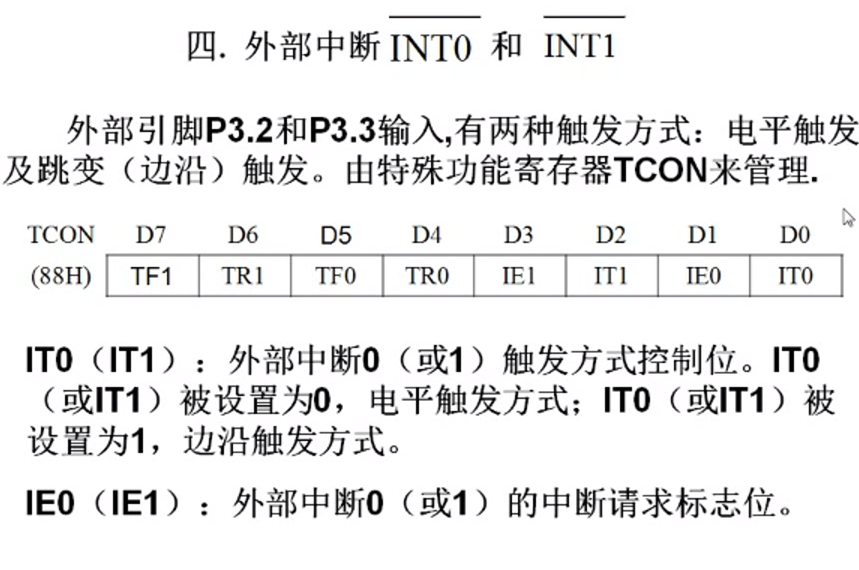
6.5、外部中断
外部中断,低电平,下降沿触发。
6.6、电路图
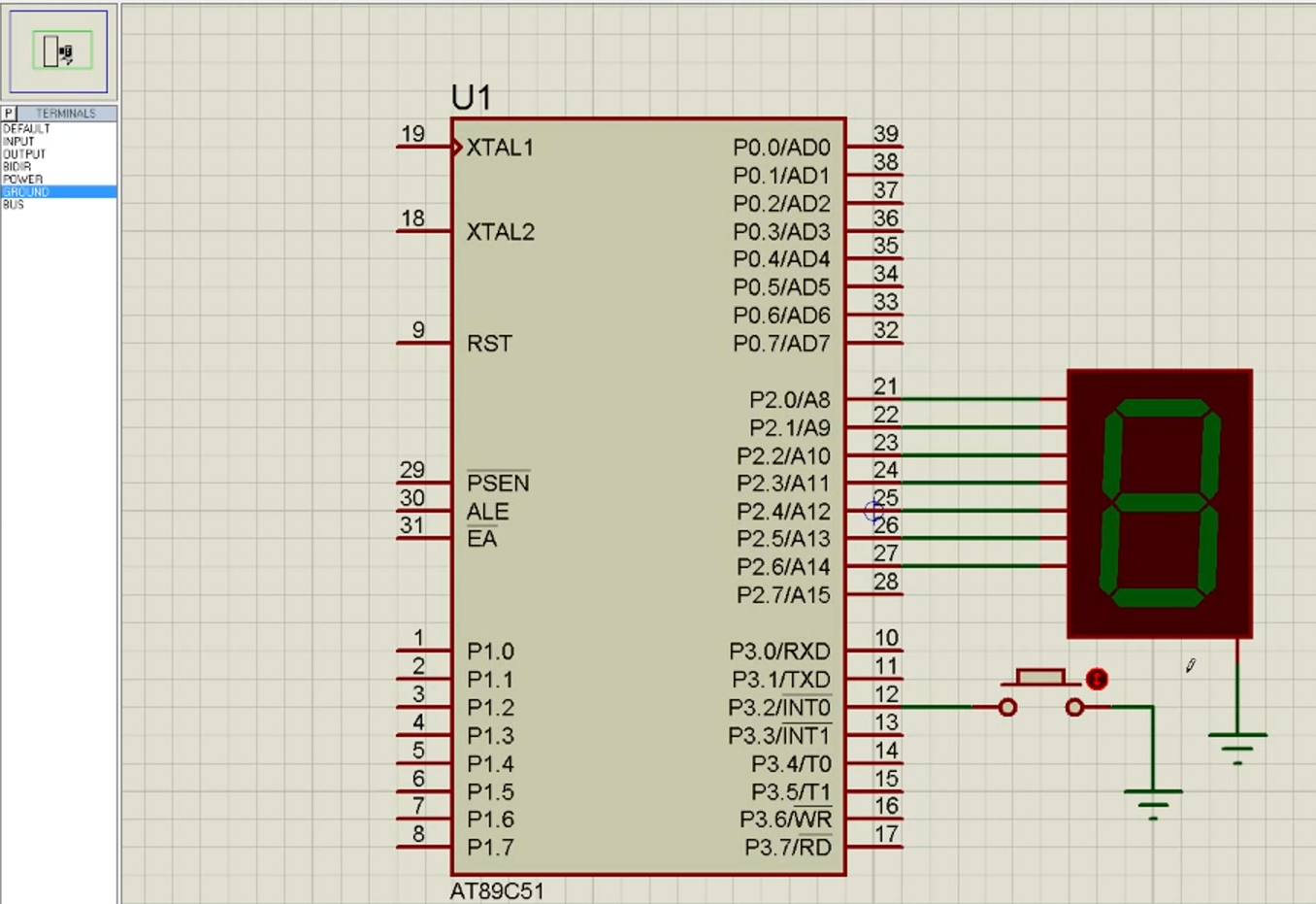
6.7、代码
实现防抖动操作,按一下键盘num值加一次
#include"reg51.h" sbit ex=P3^2; unsigned char s[]={0x3F,0x06,0x5B,0x4F,0x66,0x7D,0x07,0x7F,0x6F};//供阴极0-9 unsigned char num=0; void initex() { IT0=1;//设置边沿触发 EX0=1;//打开外部中断 EA=1;//进行使能,开启总中断 ex=1;设置为下降沿 } void display() { P2=s[num]; if(num===10) { num=0; } } void main() { initex(); while(1) { display(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
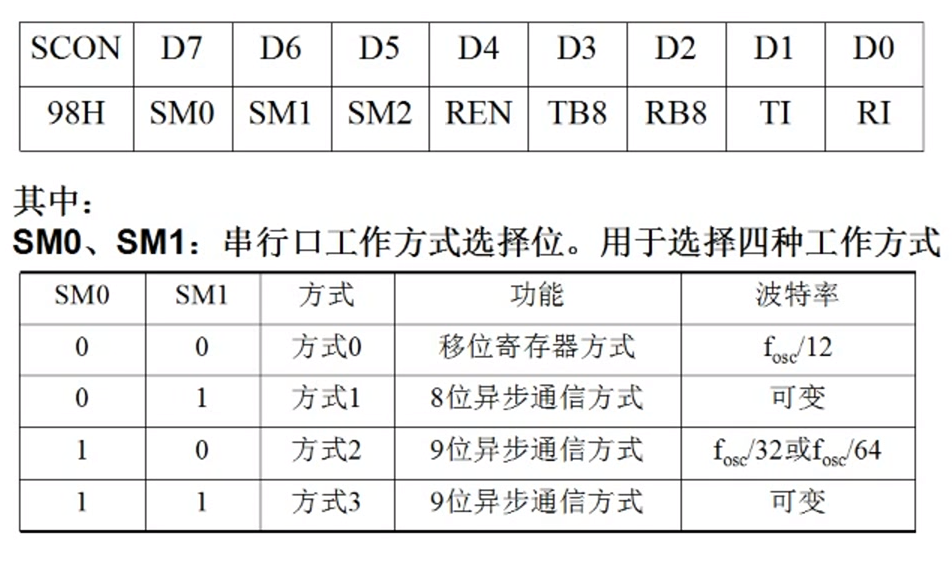
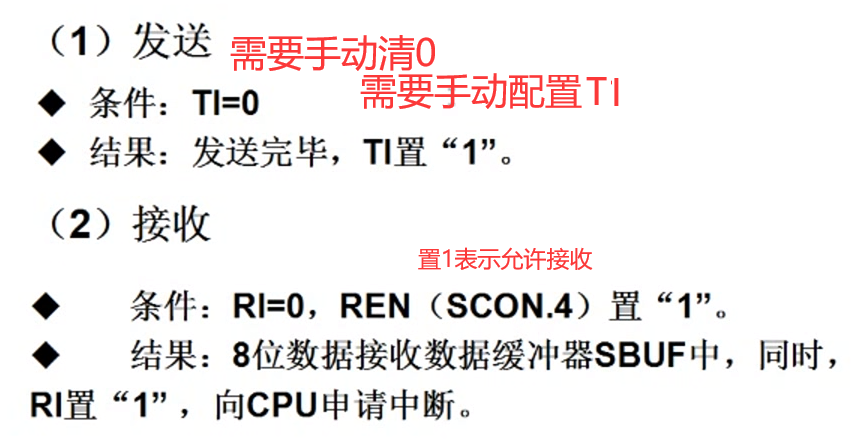
7、串行口通信
以下各位为0时表示可以接受,1表示接收完成
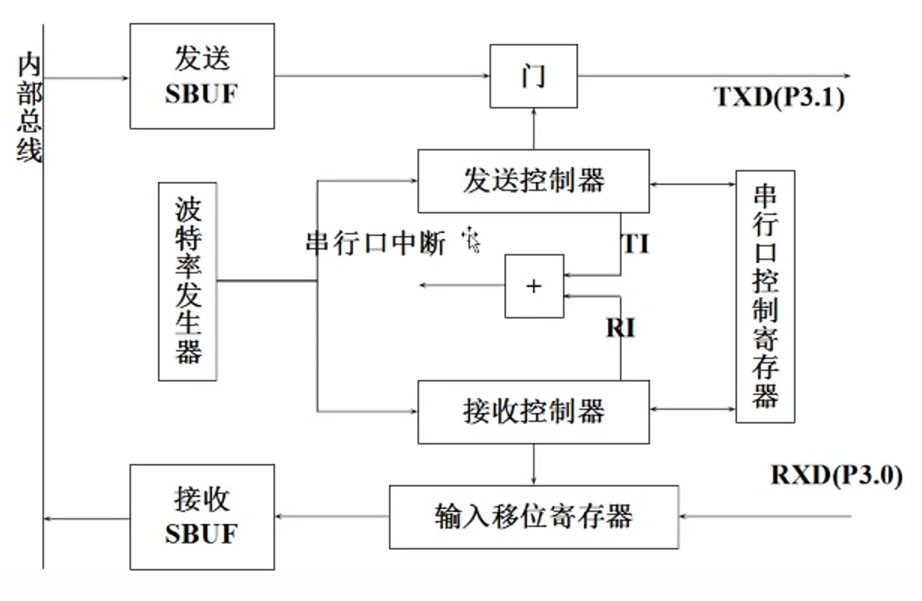
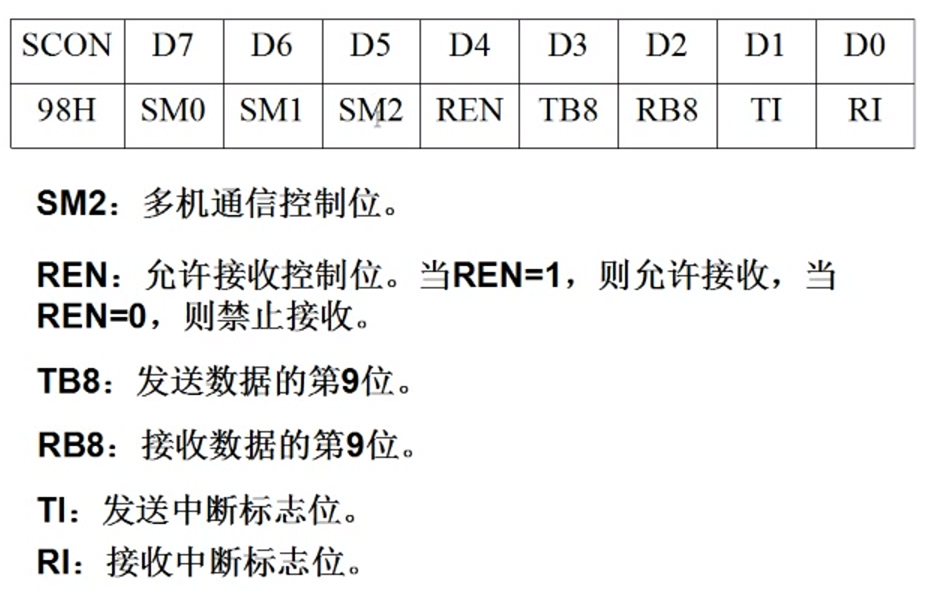
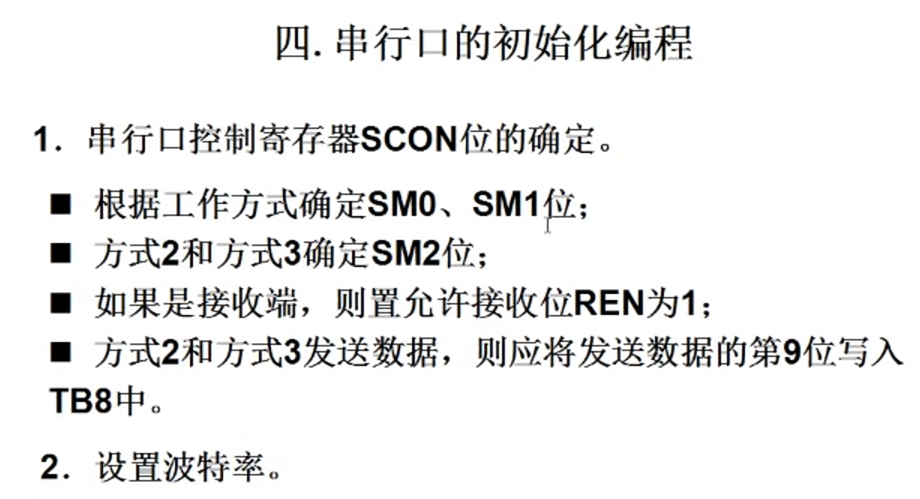
7.1、串行口 控制寄存器SCON
控制串行口的通信方式,串口的区别在于波特率不同,一般方式1用的比较多
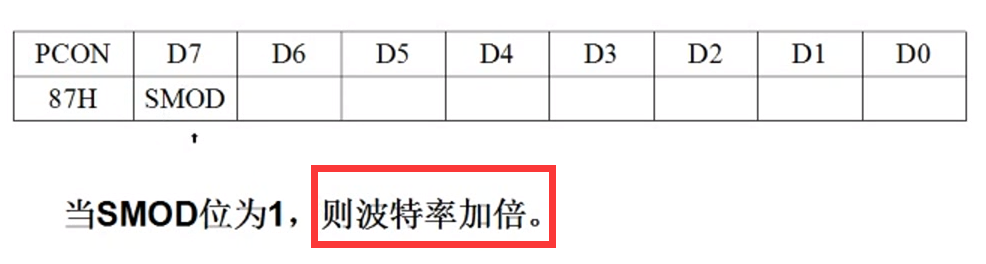
7.2、电源控制寄存器PCON
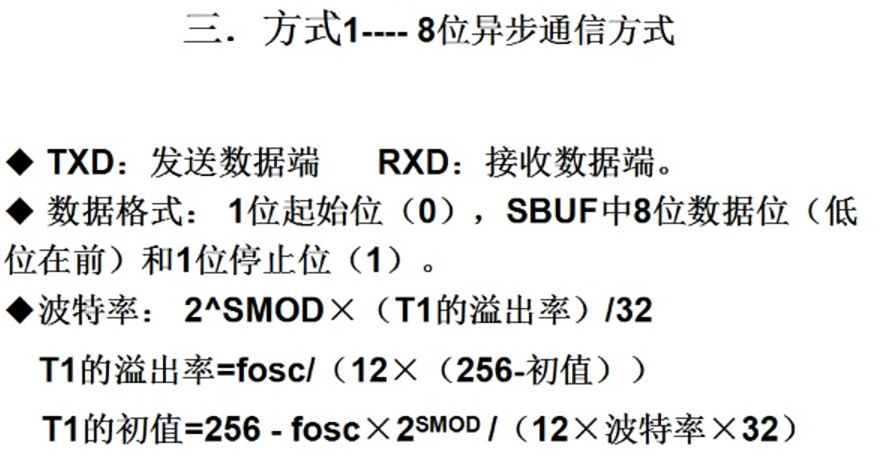
7.3、方式1的工作方式
8、模拟89C51与上位机之间的通信
8.1、电路图
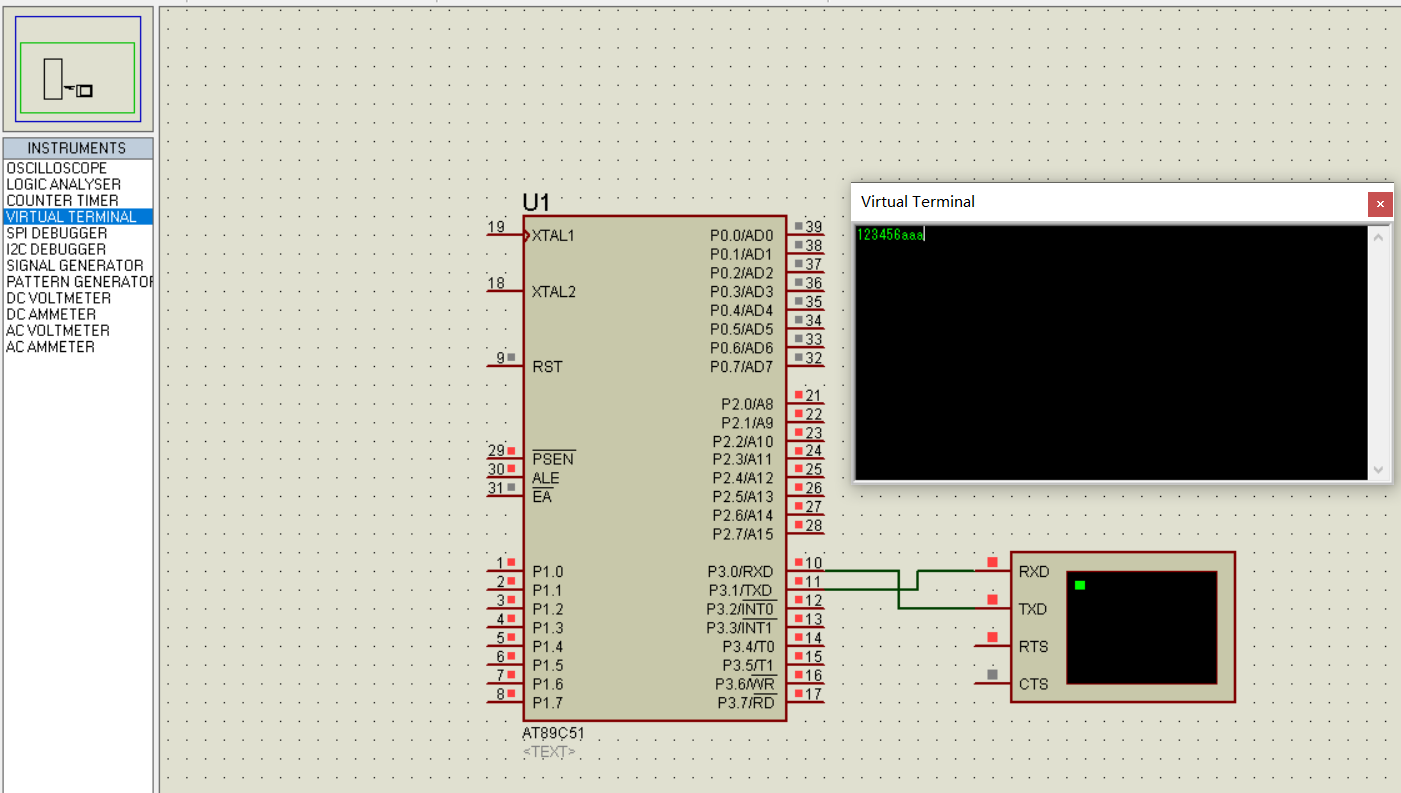
8.2、代码
#include"reg51.h" unsigned char recdat=0,flag=0; void initscon() { // 串行口控制寄存器 SCON=0x50;// 0101 0000 // 配置波特率,由定时器T1产生,参数为:(是1否0与外部中断有关系,选择定时器0还是计数器1的模式,模式0-13位,01-16位,10-8位) TMOD=0x20;// 0010 0000 // 配置初值 TH1=256-3; TL1=256-3; ES=1;// 串口中断 EA=1;//开启总中断 TR1=1;//打开定时器1 } // 发送数据 void senddat() { SBUF=recdat; while(!T1); T1=0; } void main() { // 初始化串口 initscon(); while(1) { //发送数据,通过中断发送 //接收数据,接收返回来的数据 if(flag==1) { senddat(); flag=0; } } } // 串口中断服务函数 // 0是外部中断,1是定时器0的中断,2是外部中断1,3是定时器中断1,4是串口中断 void scon_isr() interrupt 4 { // SBUF表示缓存 recdat=SBUF; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
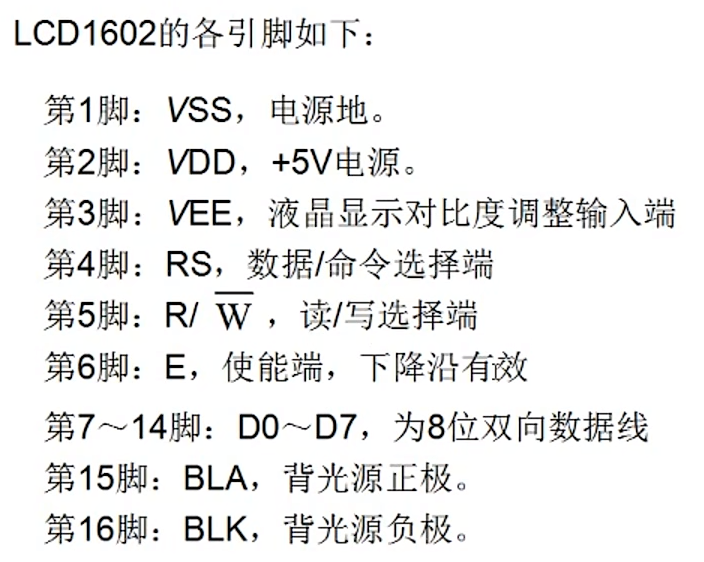
9、LCD1602的应用
9.1、LCD1602概述
LCD1602是2*16字符型液晶显示模块
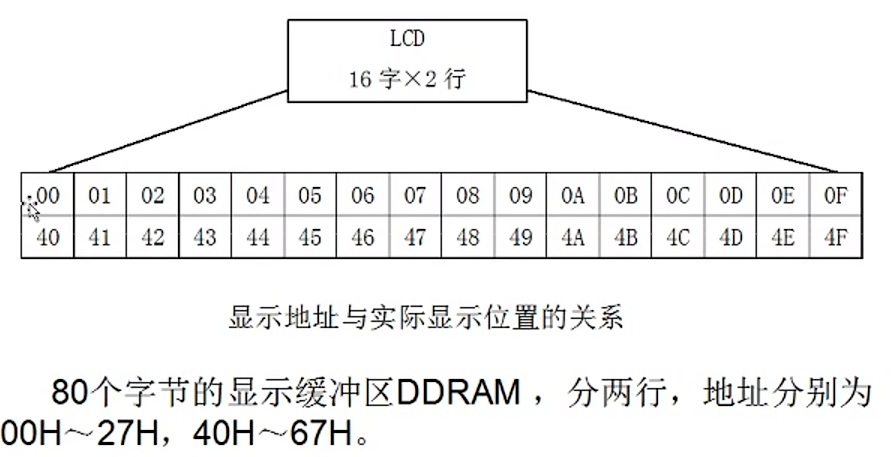
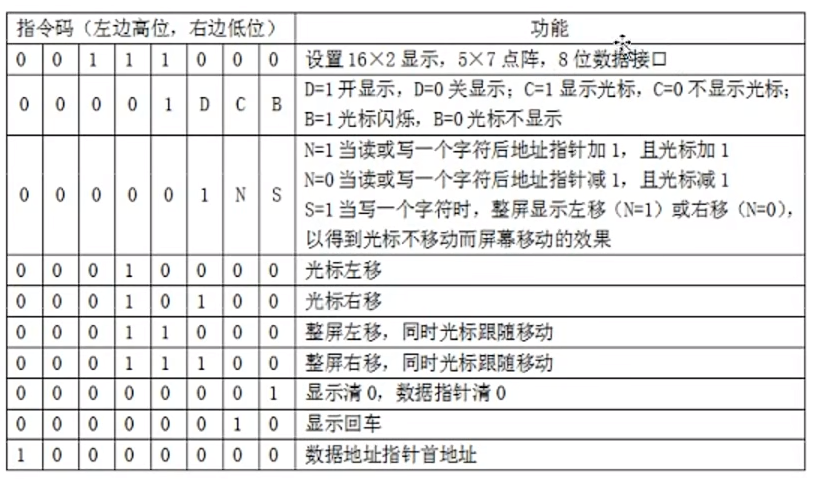
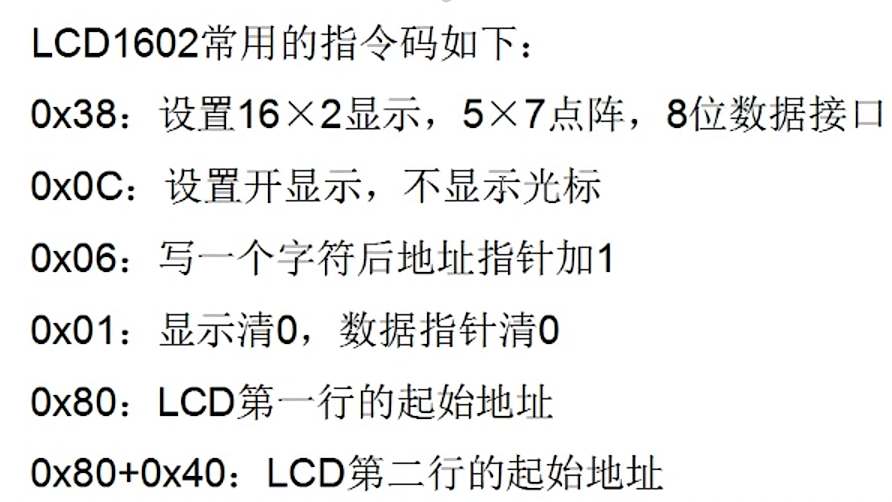
9.2、常用指令码
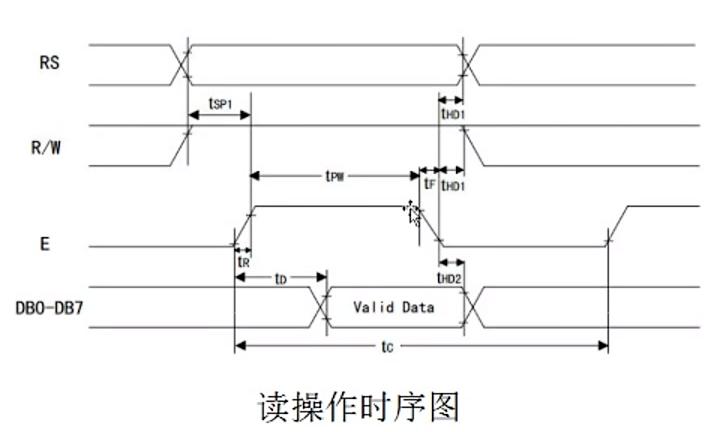
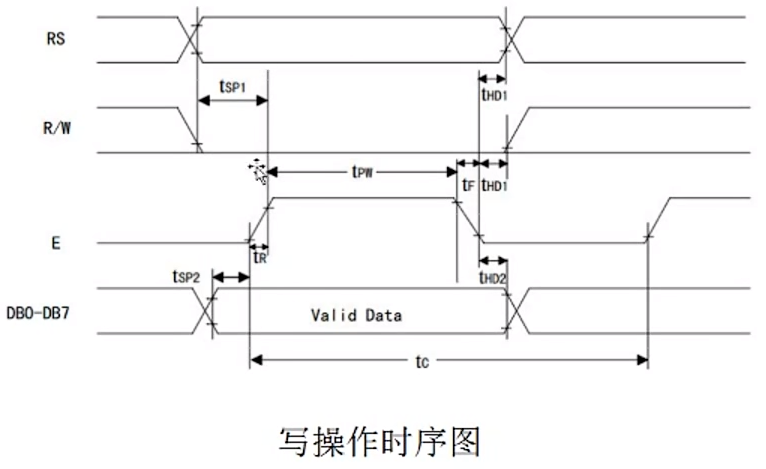
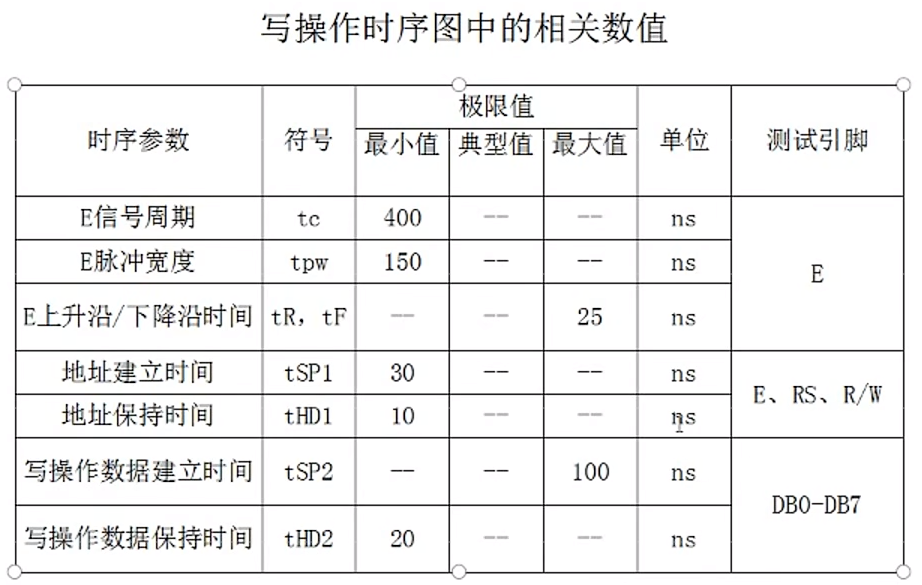
9.3、读写时序图
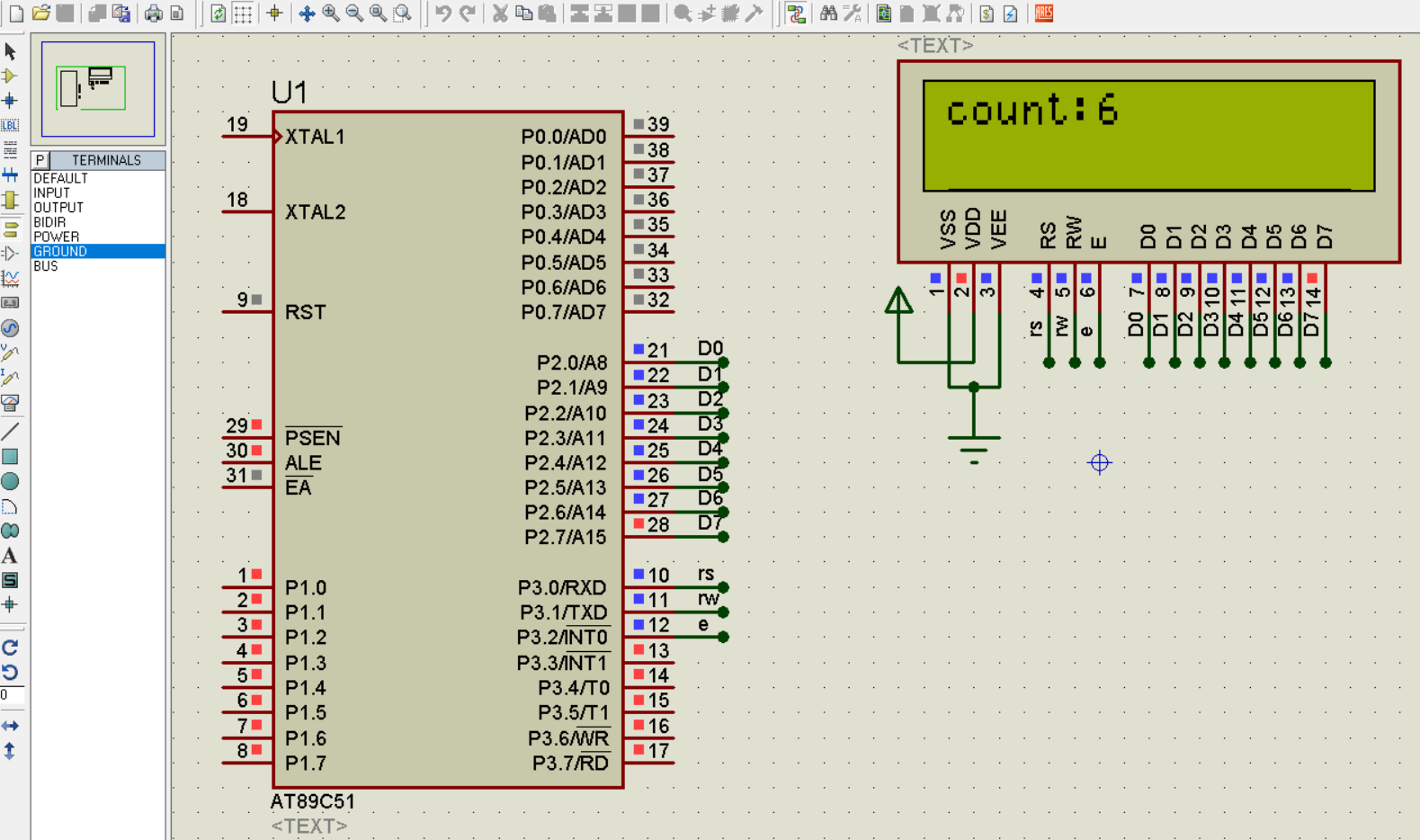
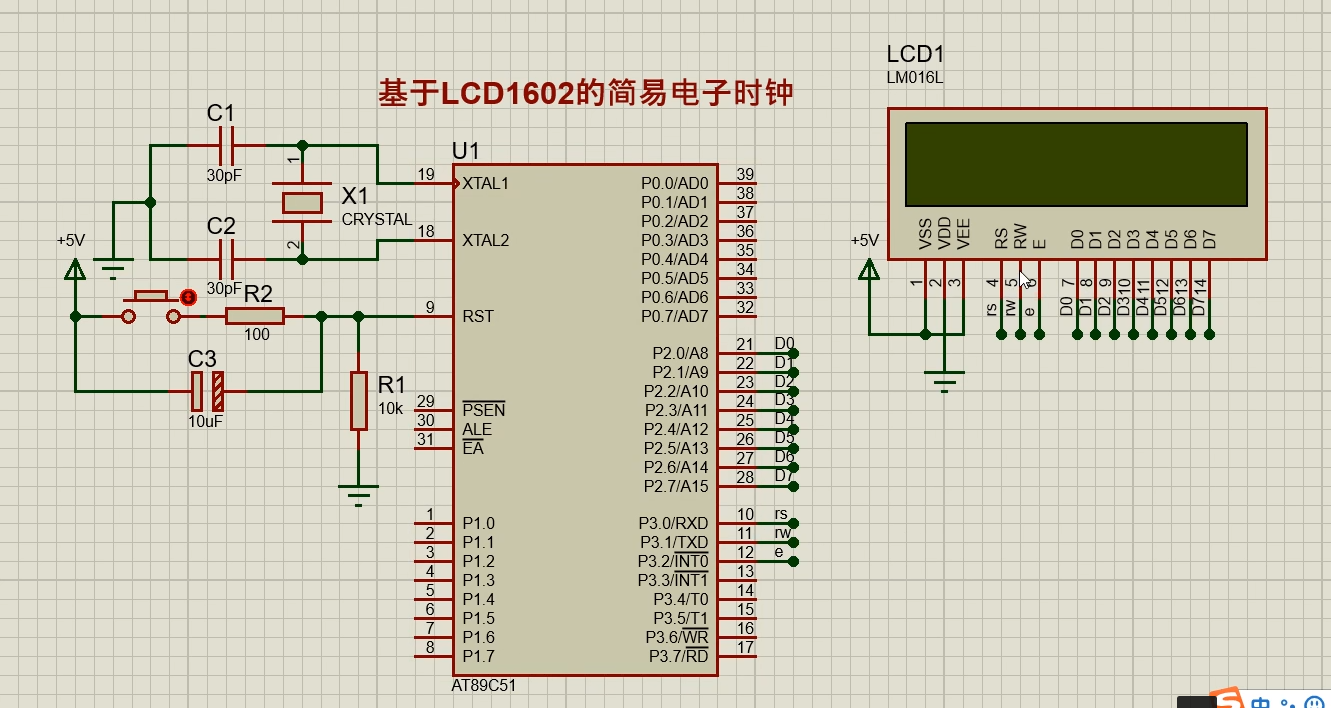
9.4、电路图一
AT89C51和LM016L
9.5、代码一
#include"reg51.h" sbit RS=P3^0; sbit RW=P3^1; sbit E=P3^2; unsigned char str[]={"count:"}; void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } void writedat(unsigned char dat) { RS=1; RW=0; E=0; P2=dat; delay(5); E=1; E=0; } void writecom(unsigned char com) { RS=0; RW=0; E=0; P2=com; delay(5); E=1; E=0; } void initlcd() { // 写入命令 writecom(0x38); writecom(0x0c); writecom(0x06); writecom(0x01); } // 显示函数 void display() { unsigned int i=0; writecom(0x80); delay(5); // writedat('A'); // delay(5); // writedat('B'); // delay(5); while(str[i]!='\0') { writedat(str[i]); delay(5); i++; } writedat(0x36); delay(5); } void main() { initlcd(); while(1) { display(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
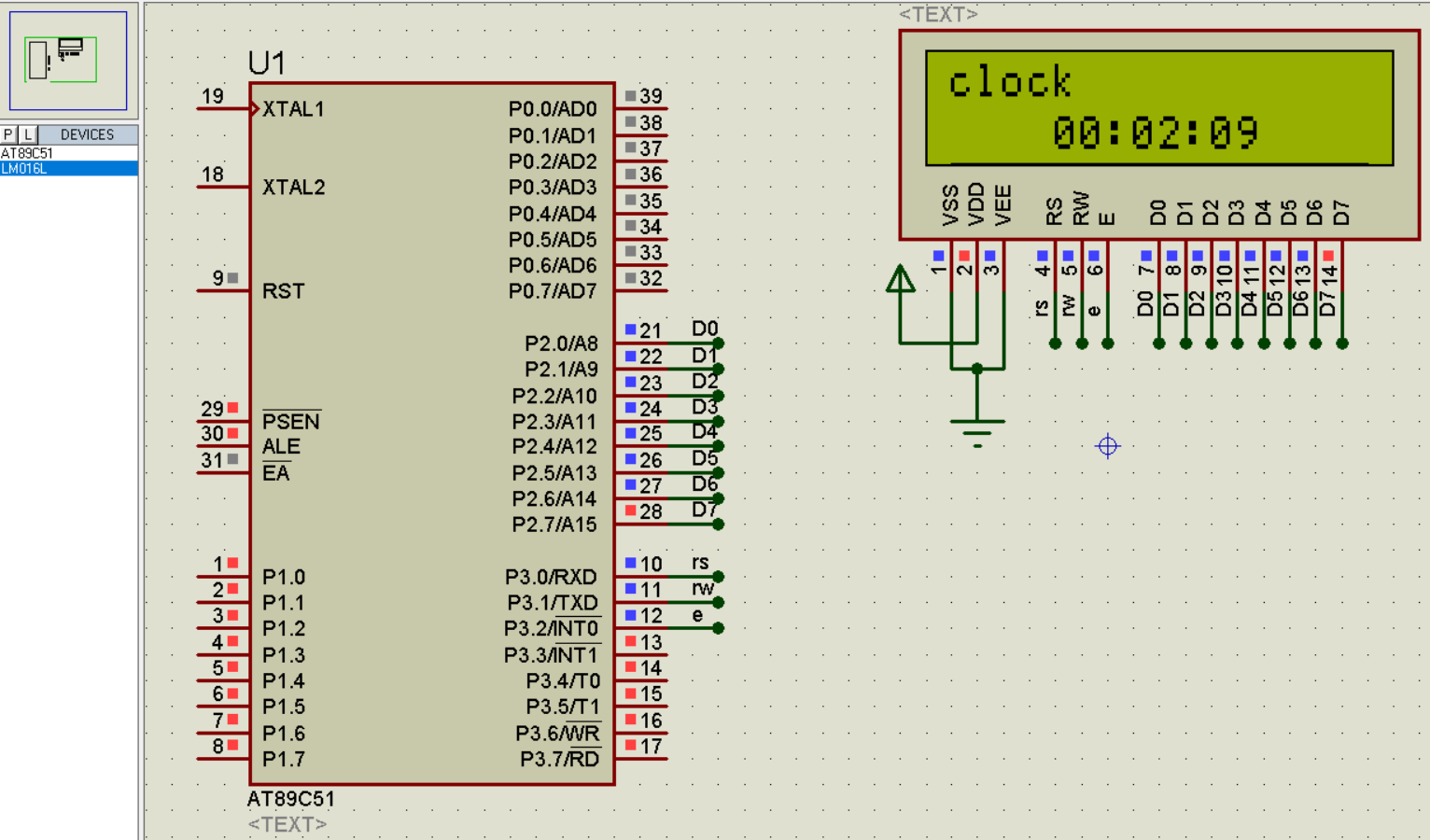
9.6、电路图二
9.7、代码二
#include"reg51.h" sbit RS=P3^0; sbit RW=P3^1; sbit E=P3^2; unsigned char count=0; unsigned int hour=0,min=0,sec=0; unsigned char str1[]={"clock"}; // 数字转字符用 unsigned char str[]={"0123456789"}; void delay(unsigned int n) { unsigned int i=0,j=0; for(i=0;i<n;i++) { for(j=0;j<120;j++); } } void writedat(unsigned char dat) { RS=1; RW=0; E=0; P2=dat; delay(5); E=1; E=0; } void writecom(unsigned char com) { RS=0; RW=0; E=0; P2=com; delay(5); E=1; E=0; } void initlcd() { // 写入命令 writecom(0x38); writecom(0x0c); writecom(0x06); writecom(0x01); } // 显示函数 void display() { unsigned char i=0; unsigned char temp0=0,temp1=0,temp2=0,temp3=0,temp4=0,temp5=0; temp0=hour/10; temp1=hour%10; temp2=min/10; temp3=min%10; temp4=sec/10; temp5=sec%10; writecom(0x80); delay(5); while(str1[i]!='\0') { writedat(str1[i]); delay(5); i++; } writecom(0x80+0x40+4);//控制在中间显示 writedat(str[temp0]); delay(5); writedat(str[temp1]); delay(5); writedat(':'); delay(5); writedat(str[temp2]); delay(5); writedat(str[temp3]); delay(5); writedat(':'); delay(5); writedat(str[temp4]); delay(5); writedat(str[temp5]); delay(5); } /*定时器*/ void inittimer() { TMOD=0x01;// 选择定时器模式为16位 TH0=(65536-50000)/256;//50ms TL0=(65536-50000)%256; ET0=1;//中断 EA=1;//打开中断 TR0=1;//开启定时器0 } void main() { initlcd(); inittimer(); while(1) { display(); } } //定时器中断函数 void timer0_isr() interrupt 1 { TH0=(65536-50000)/256;//50ms TL0=(65536-50000)%256; count++; if(count==20)//1s { sec=sec+1; count=0; } if(sec==60) { min=min+1; sec=0; } if(min==60) { hour=hour+1; min=0; } if(hour==24) { hour=0; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
9.8、实现电子时钟
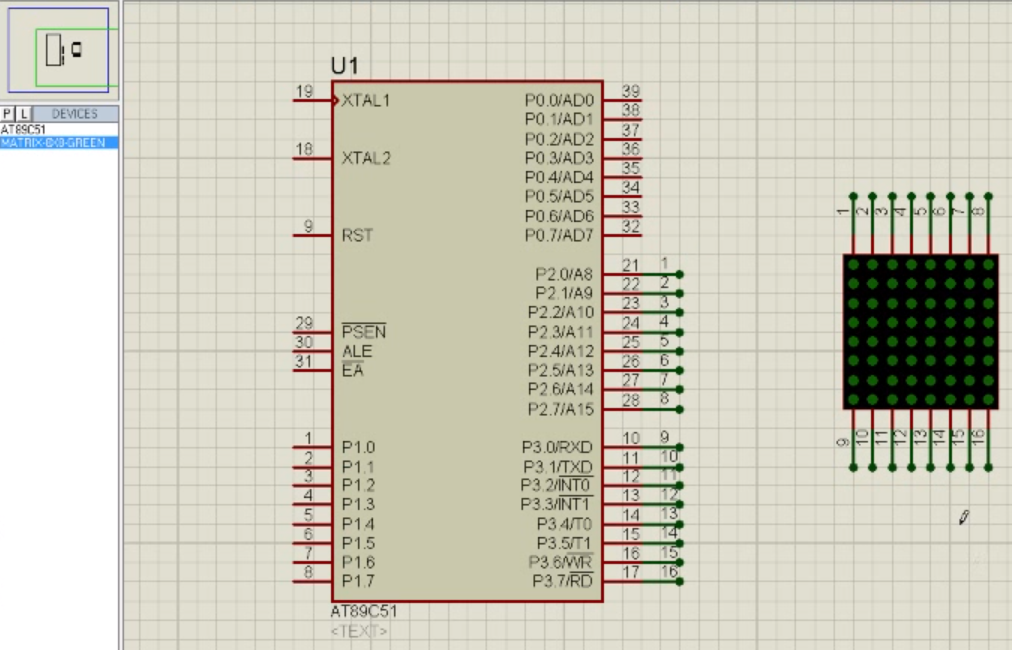
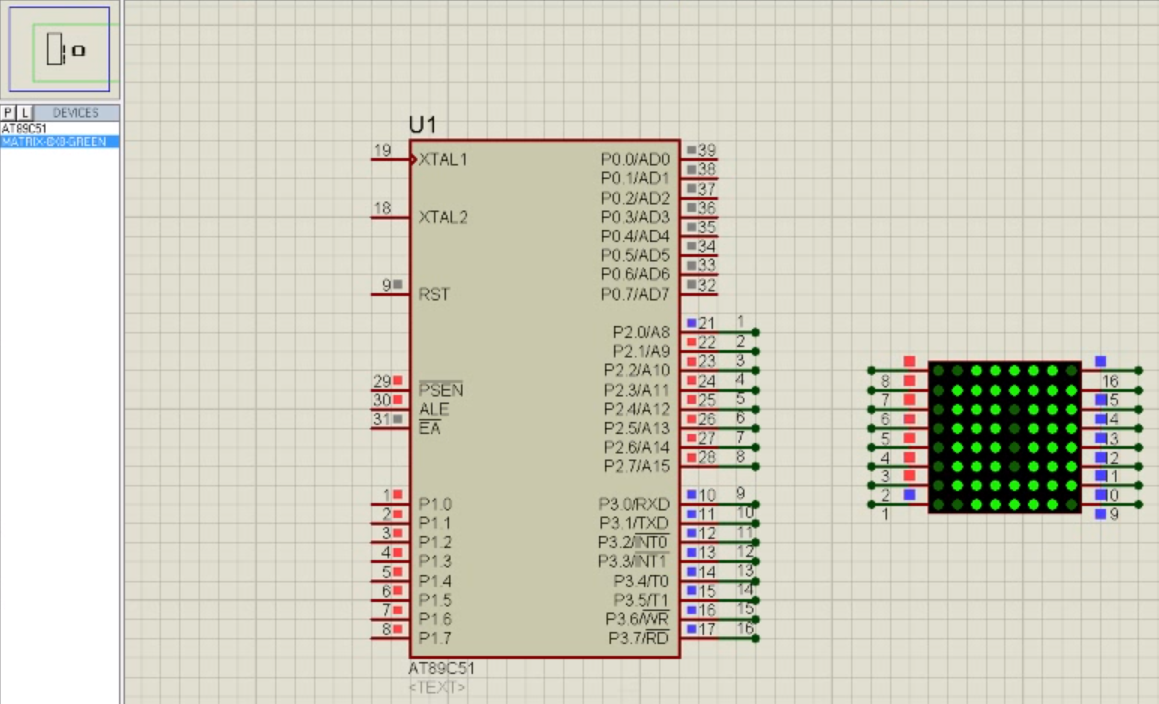
10、点阵
10.1、电路图
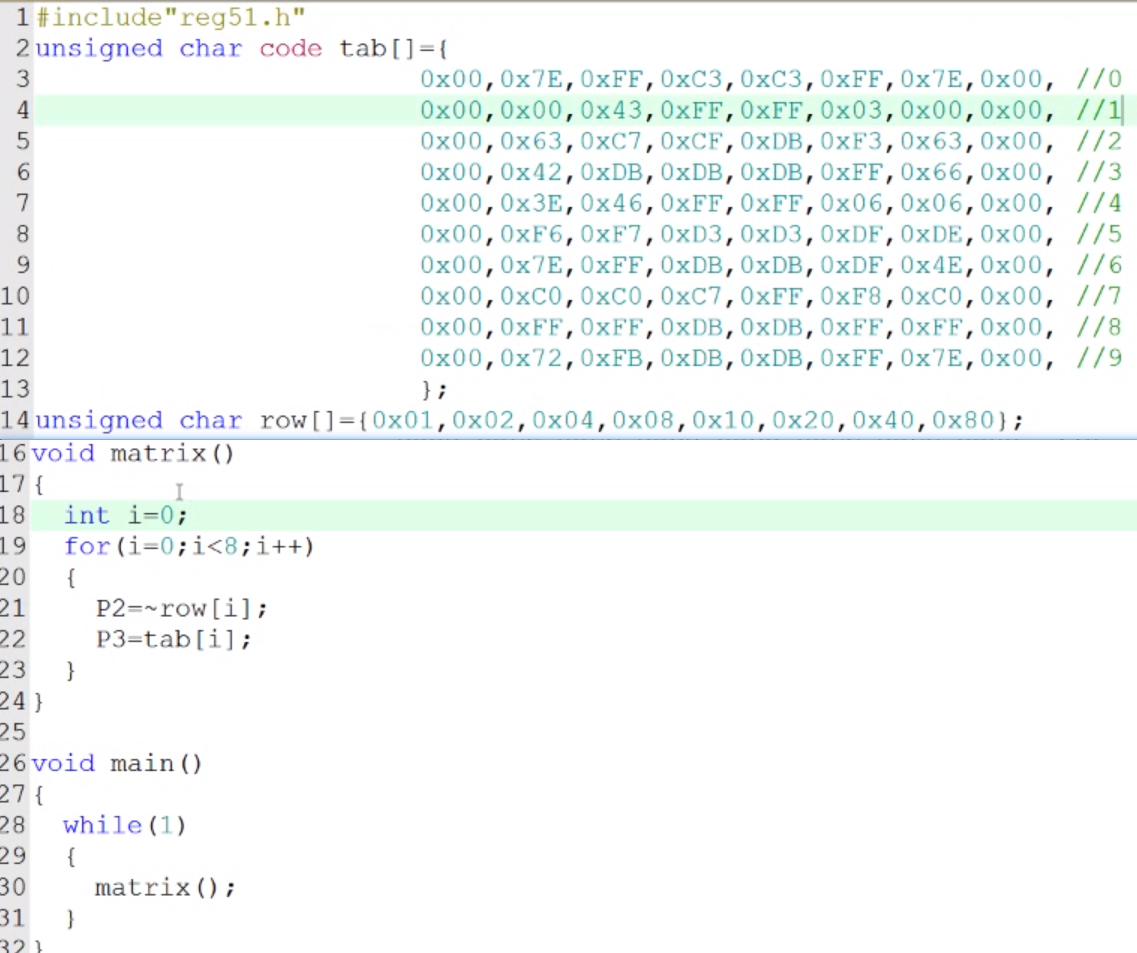
10.2、代码
实现0
11、DA转换原理及简易波形发生器的实现

12、外部中断
12.1、电路图
12.2、代码
外部中断实现按键:添加外部中断,当按下按键,触发外部中断,低电平,小灯亮,再次按下,小灯电平值取反(或使用下降沿触发,当按下时灯亮,抬起时灯灭)
// 变量定义 uchar key_num; // 键值 // 函数声明 void Delay_function(uint x); //延时函数 void Key_function(void); //按键函数 void Monitor_function(void); // 监测函数 void Display_function(void); // 显示函数 void Manage_function(void); // 处理函数 void Int0_Init(void); // 外部中断0初始化函数 void Int1_Init(void); // 外部中断1初始化函数 // 主函数 void main() { Int0_Init(); //外部中断0初始化 Int1_Init(); //外部中断1初始化 while(1) { Key_function(void);//按键函数 Monitor_function(void);// 监测函数 Display_function(void);// 显示函数 Manage_function(void);// 处理函数 } } //延时函数 void Delay_function(uint x); { uint m,n; for(m=x;m>0;m--) for(n=110;n>0;n--); } //按键函数 void Key_function(void) // 监测函数 void Monitor_function(void) { } // 显示函数 void Display_function(void) { } // 处理函数 void Manage_function(void) { } // 外部中断0初始化函数 void Int0_Init(void) { EA=1;// 打开总中断 EX0=1;// 允许外部中断0触发中断 IT0=1;// 设置外部中断触发方式,方式为下降沿触发 } // 外部中断1初始化函数 void Int1_Init(void) { EA=1;// 打开总中断 EX0=1;// 允许外部中断1触发中断 IT0=1;// 设置外部中断触发方式,方式为低电平触发 } // 外部中断0中断服务函数 void Int0_IRQHandler(void) interrupt 0 { LED = ~LED; } // 外部中断01中断服务函数 void Int1_IRQHandler(void) interrupt 2 { LED = ~LED; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
13、单片机串口
#include<reg51.h>// 去系统默认的路径查找头文件,不推荐使用
#include"reg51.h"// 先去用户自定义的路径查找,再去系统默认的路径查找,推荐使用延时函数
delay()的本质:通过空语句占用程序的时间,从而达到延时的效果 -
相关阅读:
苏宁api接口
ARM如何利用PMU的Cycle Counter(时钟周期)来计算出CPU的时钟频率
Java基础之《netty(1)—netty介绍》
烟感报警器单片机方案开发,解决方案
21天学习挑战赛-剖析直接插入排序和折半插入排序
Golang vs Rust 为后端选择哪种语言?
C++之STL-String
Skywalking入门
2022谷粒商城学习笔记(二十二)rabbitMQ学习
【web前端期末大作业】基于html关爱空巢老人网页设计与实现
- 原文地址:https://blog.csdn.net/qq_53810245/article/details/124349400