-
LVGL V8.2 嵌入式Linux平台使用tslib实现输入接口(以SSD212为例)
点击上方“嵌入式应用研究院”,选择“置顶/星标公众号”
干货福利,第一时间送达!
来源 | 嵌入式应用研究院
整理&排版 | 嵌入式应用研究院
由于驱动上报的触摸屏坐标没有进行方向翻转,故上报的坐标在屏幕方向是X、Y都反了。但是我不想 改驱动,因此只能在Linux应用上实现坐标转换。tslib对电阻屏的支持是比较好的,而且我的系统里也移植 了tslib相关的库,那么直接拿来用就好了。
1、tslib在文件系统中的配置

如果想要开机就自动加载tslib环境,则需要在rcS中添加
source /etc/profile,让环境变量生效,这 样tslib环境在Linux系统启动后,进入文件系统的时候便能够自动将相关的环境变量加载成功。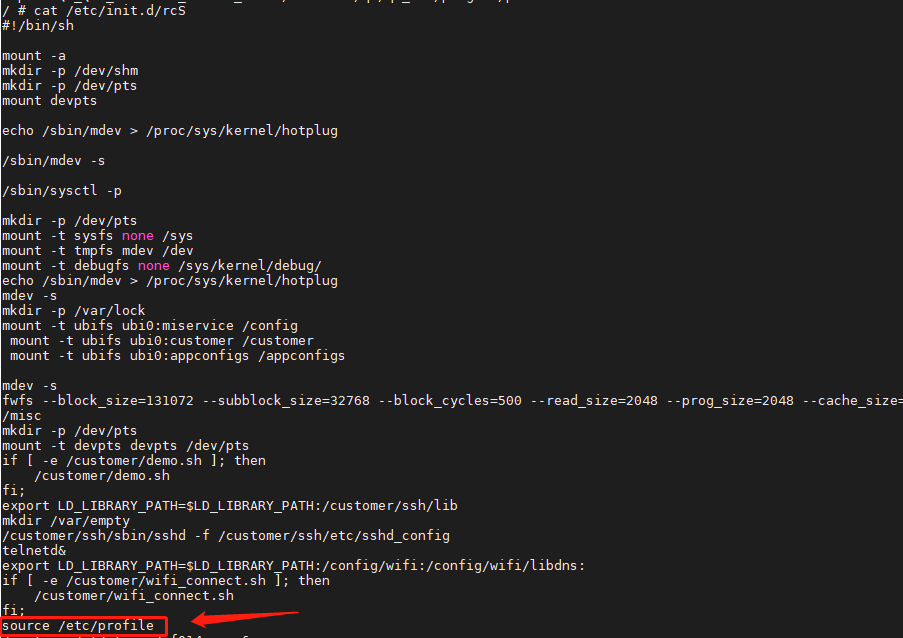
2、实现事件初始化和事件读函数
- #include "evdev.h"
- #include <stdio.h>
- #include <unistd.h>
- #include <fcntl.h>
- #include <linux/input.h>
- #include "tslib.h"
- int evdev_root_x;
- int evdev_root_y;
- int evdev_button;
- struct tsdev *ts;
- struct ts_sample samp;
- //事件初始化
- void evdev_init(void)
- {
- //以只读 & 非阻塞的形式打开事件节点
- //调用ts_setup的条件是需要在环境变量中声明TSLIB_TSDEVICE变量
- //否则推荐使用ts_open函数来进行初始化
- ts = ts_setup(NULL, O_RDONLY | O_NONBLOCK);
- if (!ts) {
- perror("ts_setup");
- exit(1);
- }
- evdev_root_x = 0;
- evdev_root_y = 0;
- evdev_button = LV_INDEV_STATE_REL;
- }
- //读取输入事件
- void evdev_read(lv_indev_drv_t * drv, lv_indev_data_t * data)
- {
- //当获取到触摸时将读取到的点的坐标以及状态赋值给临时变量
- while(ts_read(ts, &samp, 1) > 0)
- {
- evdev_root_x = samp.x ;
- evdev_root_y = samp.y ;
- }
- if(0 == samp.pressure)
- evdev_button = LV_INDEV_STATE_REL ;
- else
- evdev_button = LV_INDEV_STATE_PR ;
- //将变量注册到LVGL输入设备接口的环境中
- data->point.x = evdev_root_x ;
- data->point.y = evdev_root_y ;
- data->state = evdev_button ;
- //坐标限幅
- if(data->point.x < 0)
- data->point.x = 0;
- if(data->point.y < 0)
- data->point.y = 0;
- if(data->point.x >= drv->disp->driver->hor_res)
- data->point.x = drv->disp->driver->hor_res - 1;
- if(data->point.y >= drv->disp->driver->ver_res)
- data->point.y = drv->disp->driver->ver_res - 1;
- return ;
- }
要让LVGL支持输入,我们需要将实现驱动注册,按照文档提示:

因此在main函数中需要进行如下调用注册输入设备:
- evdev_init();
- static lv_indev_drv_t indev_drv_1;
- lv_indev_drv_init(&indev_drv_1);
- indev_drv_1.type = LV_INDEV_TYPE_POINTER; //触摸板或鼠标
- indev_drv_1.read_cb = evdev_read;
- lv_indev_drv_register(&indev_drv_1);
这时候LVGL的输入设备接口就可以调用tslib的接口来读取触摸事件了。
另外,还需要注意的地方是在Makefile中需要添加tslib的路径:
- #
- # Makefile
- #
- CC := arm-linux-gnueabihf-gcc
- LVGL_DIR_NAME ?= lvgl
- LVGL_DIR ?= ${shell pwd}
- CFLAGS ?= -O3 -g0 -I$(LVGL_DIR)/ -Wall -Wshadow -Wundef -Wmissing-prototypes -Wno-discarded-qualifiers -Wall -Wextra -Wno-unused-function -Wno-error=strict-prototypes -Wpointer-arith -fno-strict-aliasing -Wno-error=cpp -Wuninitialized -Wmaybe-uninitialized -Wno-unused-parameter -Wno-missing-field-initializers -Wtype-limits -Wsizeof-pointer-memaccess -Wno-format-nonliteral -Wno-cast-qual -Wunreachable-code -Wno-switch-default -Wreturn-type -Wmultichar -Wformat-security -Wno-ignored-qualifiers -Wno-error=pedantic -Wno-sign-compare -Wno-error=missing-prototypes -Wdouble-promotion -Wclobbered -Wdeprecated -Wempty-body -Wtype-limits -Wshift-negative-value -Wstack-usage=2048 -Wno-unused-value -Wno-unused-parameter -Wno-missing-field-initializers -Wuninitialized -Wmaybe-uninitialized -Wall -Wextra -Wno-unused-parameter -Wno-missing-field-initializers -Wtype-limits -Wsizeof-pointer-memaccess -Wno-format-nonliteral -Wpointer-arith -Wno-cast-qual -Wmissing-prototypes -Wunreachable-code -Wno-switch-default -Wreturn-type -Wmultichar -Wno-discarded-qualifiers -Wformat-security -Wno-ignored-qualifiers -Wno-sign-compare -I /home/yw/share/tslib_1.22/include/
- LDFLAGS ?= -lm -lts -lpthread -L/home/yangyx/share/tslib_1.22/lib/
- BIN = wifi_scan_list
- ....省略....
- ....
如上所示,我们需要在LDFLAGS处添加tslib库的路径:
-L/home/yangyx/share/tslib_1.22/lib/这样才能识别我们在程序中调用的tslib接口。由于我们这个程序是在ARM平台上使用,因此需要根据不同的交叉编译工具链修改,这里我用的是SSD212平台,因此配置为:
CC := arm-linux-gnueabihf-gcc修改完毕后重新编译程序,再将可执行文件移植到相应的平台上即可使用。目前应用例程还在修改中,后续将会共享到Github或者Gitee,地址将在评论区给出。
往期精彩
分享一个在Keil开发环境中配置代码格式化工具Astyle(美化代码风格)
Keil MDK 将升级为 Keil Studio,你想要的黑色主题来了,附手把手使用教程
Keil MDK的一些推荐功能(编码格式、自动保存、代码提示、动态语法检查、多核编译)
觉得本次分享的文章对您有帮助,随手点
[在看]并转发分享,也是对我的支持。 -
相关阅读:
VMware Ubuntu 关闭自动更新
运维常用概念
xftp连接wsl2
Python爬虫不太冷系列一:初识爬虫
【六一儿童节】回忆一下“童年的记忆”
专升本三本计科仔学习java到实习之路4
uniapp vuex正确的打开方式
MyBatisPlus 入门教程,这篇很赞
Kamiya丨Kamiya艾美捷小鼠血红蛋白ELISA说明书
js的节流和防抖详解
- 原文地址:https://blog.csdn.net/morixinguan/article/details/125466068