-
目标检测——ADAS实战
ADAS业务场景综述
先进驾驶辅助系统(Advanced Driver Assistance System),简称ADAS,是利用安装于车.上的各式各样的传感器,在第一 -时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以弓 |起注意和提高安全性的主动安全技术。业务场景:
导航与实时交通系统TMC、电子警察系统、车联网、自适应巡航ACC、车道偏移报警系统.、车道保持系统、碰撞避免或预碰撞系统、夜视系统、自适应灯光控制、行人保护系统、自动泊车系统、交通标志识别、盲点探测、驾驶员疲劳探测、下坡控制系统、电动汽车报警系统等等。
问题描述:
检测车载视频数据中的机动车、非机动车、行人、交通标识符
➢标准的目标检测问题
不同目标的外观差异
光照,遮挡的影响
不同视角
不同大小
不同位置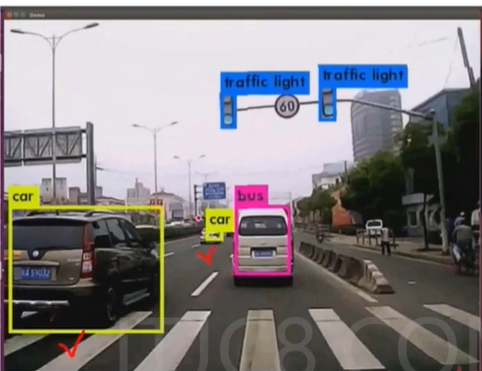
数据标注方法——矩形标注
判断算法性能好坏
➢检测率、误报率
每一个标记只允许有一个检测与之相对应
重复检测会被视为错误检测
➢AP和mAP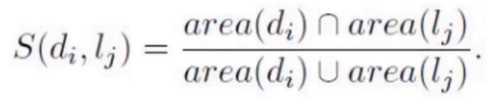
数据集资源
➢KITTI 数据集
➢MOT数据集
➢Berkeley的大规模自动驾驶视频数据集
➢https://blog.csdn.net/u010821 666/article/details/ 79026100ADAS场景行业应用现状
机动车、非机动车、行人检测问题难点
➢阴天、雨天、夜间目标检测问题
➢拥挤场景下的目标检测问题
➢行人刚性运动带来的检测难题
➢小目标检测问题
➢遮挡问题等等ADAS业务场景数据集打包
KITTI数据集介绍
➢KITTI数据集
➢http://www.cvlibs.net/datasets/kitti/eval object.php?obj benchmark=2d
➢KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上知名的自动驾驶场景下的计算机视觉算法评测数据集。
➢该数据集用于评测立体图像,光流,视觉测距,3D物体检测和3D跟踪等计算机视觉技术在车载环境下的性能。
➢KITTI包含市区、乡村和高速公路等场景采集的真实图像数据, 每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。
➢整个数据集由389对立体图像和光流图, 39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成,以10Hz的频率采样及同步。KITTI数据使用:
下载链接:http://www.cvlibs.net/datasets/kitti/eval object.php?obj benchmark=2d


标注信息:

-
相关阅读:
CentOS 系统如何在防火墙开启端口
痞子衡嵌入式:不同J-Link版本对于i.MXRT1170连接复位后处理行为有所不同
miniblink学习
【可视化工具】二维矩形装箱可视化 + JS-Canvas实现
接口自动化测试之Mock
前端可视化大屏设置全屏模式方法
Java之IO流详解(二)——字节流
java实现微信服务(公众)号用户关注时,获取openid,安全模式下的加密解密实现
基于低代码平台的OA系统,更灵活高效!
log4j Logger简介说明
- 原文地址:https://blog.csdn.net/qingxiao__123456789/article/details/125464824