-
ROS2自学笔记:动作
动作是ROS2中一个通信机制,一般分为发送指令,汇报进度,汇报任务完成的步骤。动作有以下特定:
1 客户端,服务器模型:双向通信机制
2 服务器端唯一,客户端不唯一
3 同步通信:因为要定期反馈信息,所以需要同步通信
4 消息接口类型.action动作为应用层通信机制,其底层为话题和服务。发送开始和结束任务利用服务,而定期反馈利用话题
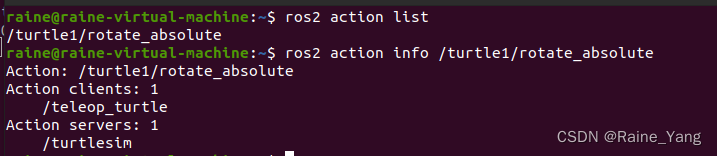
监测动作信息
ros2 action list
显示动作列表
ros2 action info (动作名称)
显示一个动作详细信息
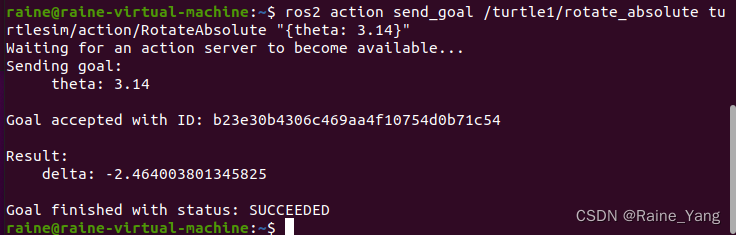
发送动作请求:ros2 action send_goal (动作名称)(动作类型)(目标)
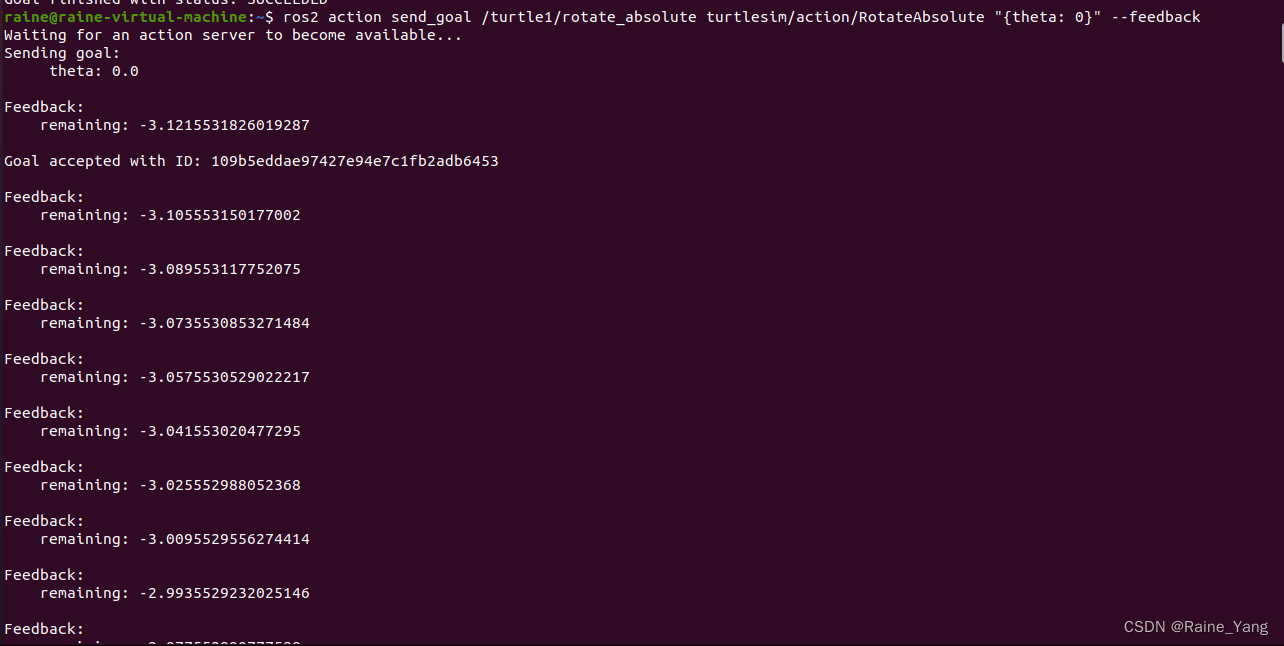
发送动作请求并接受反馈
ros2 action send_goal (动作名称)(动作类型)(目标)–feedback
示例:模拟旋转机器人
发送动作请求旋转360度,程序每旋转30度会进行一次反馈,最终显示是否旋转完成接口文件:
bool enable // start --- bool finish // finish --- int32 state // feedback- 1
- 2
- 3
- 4
- 5
动作接口分为三部分:1 发送开始信息 2 接受中间反馈 3 发送结束信息
接口要在CMakeList.txt里进行声明:rosidl_generate_interfaces(${PROJECT_NAME} "action/MoveCircle.action" )- 1
- 2
- 3
服务器端:
import time import rclpy from rclpy.node import Node from rclpy.action import ActionServer from learning_interface.action import MoveCircle class MoveCircleActionServer(Node): def __init__(self, name): super().__init__(name) self.action_server = ActionServer(self, MoveCircle, 'move_circle', self.execute_callback) def execute_callback(self, goal_handle): self.get_logger().info('Moving circle...') feedback_msg = MoveCircle.Feedback() for i in range(0, 360, 30): feedback_msg.state = i self.get_logger().info('Publishing feedback: %d' % feedback_msg.state) goal_handle.publish_feedback(feedback_msg) time.sleep(0.5) goal_handle.succeed() result = MoveCircle.Result() result.finish = True return result def main(args=None): rclpy.init(args=args) node = MoveCircleActionServer("action_move_server") rclpy.spin(node) node.destroy_node() rclpy.shutdown()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
1 from rclpy.action import ActionServer
引入动作服务器类2 from learning_interface.action import MoveCircle
引入MoveCircle动作接口3 self.action_server = ActionServer(self, MoveCircle, ‘move_circle’, self.execute_callback)
创建动作服务器类,参数:动作接口,动作名称,回调函数4 def execute_callback(self, goal_handle):
创建回调函数5 feedback_msg = MoveCircle.Feedback()
实例化Feedback,MoveCircle.Feedback()对应int32 state6 goal_handle.publish_feedback(feedback_msg)
发布feedback,这里类似于话题通信7 goal_handle.succeed()
动作执行成功8 result = MoveCircle.Result()
实例化Result,这里MoveCircle.Result对应接口里bool finish9 result.finish = True
return result
返回结束信息客户端
import rclpy from rclpy.node import Node from rclpy.action import ActionClient from learning_interface.action import MoveCircle class MoveCircleActionClient(Node): def __init__(self, name): super().__init__(name) self.action_client = ActionClient(self, MoveCircle,'move_circle') def send_goal(self, enable): goal_msg = MoveCircle.Goal() goal_msg.enable = enable self.action_client.wait_for_server() self.send_goal_future = self.action_client.send_goal_async(goal.msg, feedback_callback = self.feedback_callback) self.send_goal_future.add_done_callback(self.goal_response_callback) def goal_response_callback(self, future): goal_handle = future.result() if not goal_handle.accepted: self.get_logger().info('Goal rejected') return self.get_logger().info('Goal accepted') self.get_result_future = goal_handle.get_result_async() self.get_result_future.add_done_callback(self.get_result_callback) def get_result_callback(self, future): result = future.result().result self.get_logger().info('Result: {%d}' % result.finish) def feedback_callback(self, feedback_msg): feedback = feedback_msg.feedback self.get_logger().info('Received feedback: {%d}' % feedback.state) def main(args=None): rclpy.init(args=args) node = MoveCircleActionClient("action_move_client") node.send_goal(True) rclpy.spin(node) node,destroy_node() rclpy.shutdown()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
1 from learning_interface.action import MoveCircle
引入接口MoveCircle2 self.action_client = ActionClient(self, MoveCircle,‘move_circle’)
创建客户端对象,参数:动作接口,动作名称(和服务器端一致)3 def send_goal(self, enable):
goal_msg = MoveCircle.Goal()
goal_msg.enable = enable
发送开始信息函数4 self.action_client.wait_for_server()
等待服务器响应5 self.send_goal_future = self.action_client.send_goal_async(goal.msg, feedback_callback = self.feedback_callback)
进行异步通信,发送goal_msg开始信息(bool enable),设置回调函数feedback_callback用于处理反馈信息6 self.send_goal_future.add_done_callback(self.goal_response_callback)
添加回调函数goal_response_callback,用于处理开始信息7 goal_handle = future.result()
接受动作结果8 self.get_result_future = goal_handle.get_result_async()
进行异步通信获取动作执行结果9 self.get_result_future.add_done_callback(self.get_result_callback)
添加回调函数,用于处理结束信息10 def get_result_callback(self, future):
result = future.result().result
self.get_logger().info(‘Result: {%d}’ % result.finish)
获取结束信息的回调函数11 def get_result_callback(self, future):
result = future.result().result
self.get_logger().info(‘Result: {%d}’ % result.finish)
获取反馈信息的回调函数12 node.send_goal(True)
在主方法里调用发送信息的函数程序流程:
1 客户端调用send_goal(True)
2 客户端self.action_client.send_goal_async发送服务请求
3 服务器接受请求,触发回调函数execute_callback,开始打印并发送feedback信息
4 收到feedback信息会同时触发goal_response_callback和feedback_callback。goal_response_callback打印服务请求是否成功,feedback_callback打印反馈数据
5 服务器端for循环结束后return finish,返回结束数据
6 结束数据触发客户端get_result_callback回调函数,这一函数说明任务是否完成 -
相关阅读:
Android中的适配器,你知道是做什么的吗?
flask中使用redis做缓存
APIMapper 源码解析
Java设计模式之创建型模式
Xcode15更新内容
职场中需要注意这3种人
长尾关键词优化 网站是卖大闸蟹的 怎么用长尾关键词优化网站
性能测试之压力测试
香港服务器托管对外贸行业必要性和优势
二、Javascript类型[数组、对象]
- 原文地址:https://blog.csdn.net/Raine_Yang/article/details/125452977