-
HC-SR04超声波模块测距原理与原理图
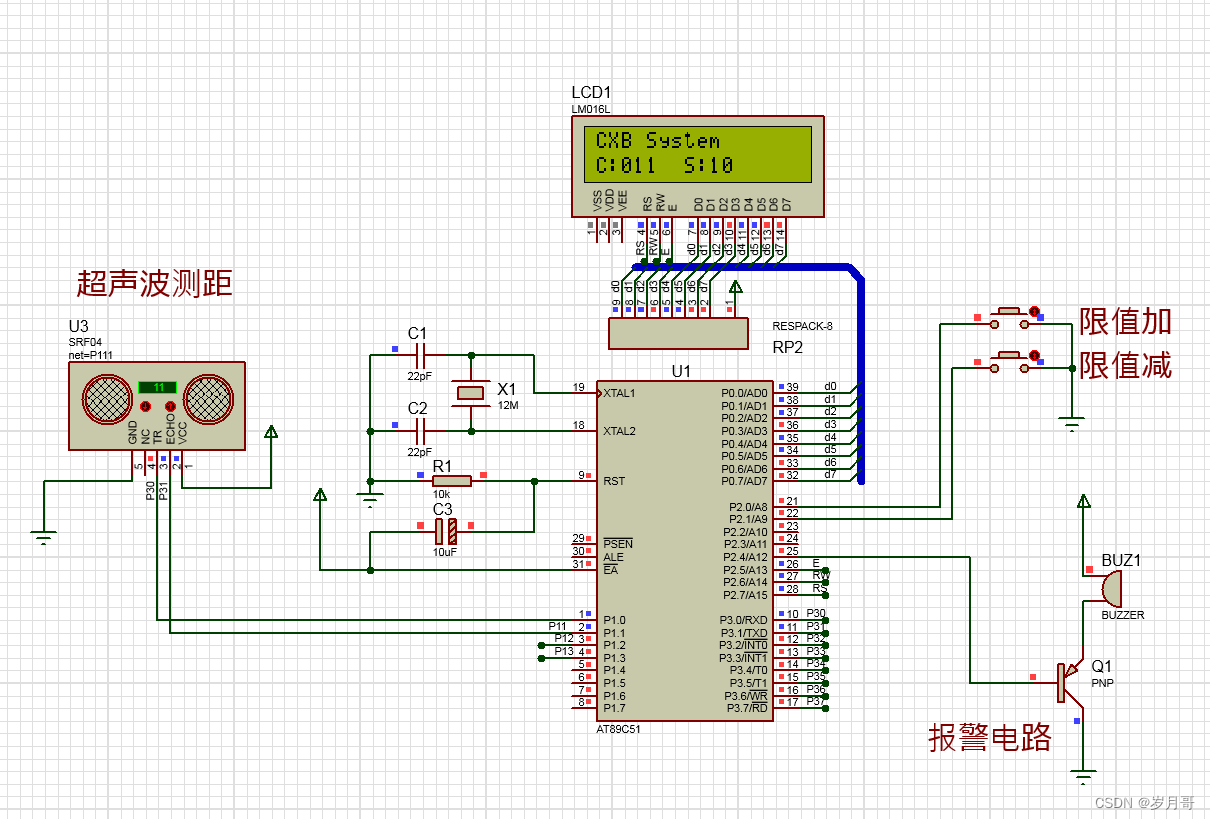
仿真功能图
.
.
.
上面仿真图功能描述:
1 本实验用hcsr04作为超声波模块
2 1602液晶显示测量距离
3 可以设置限值
4 当测量的距离值少于设置值,蜂鸣器报警
5 仿真实验的程序和实物的程序可以同样使用
.
.
今天再发一个基于Proteus仿真的超声波测距。Proteus8.0之前的版本中都没有超声波测距这个模块,所以在Proteus7的软件中大部分超声波测距仿真都是采用的网友自制的超声波测距模块,自制的模块在仿真时交互性不是很友好,所以今天分享的仿真是基于Proteus8.8版本。超声波测距模块在Proteus中的名称叫做SRF04,它的工作原理与之前文章中介绍的超声波模块工作原理一致,都是通过一个IO控制超声波模块的发射,通过另外一个IO对超声波接收端的信号进行检测,计算出超声波信号的运动时间,进而计算出模块与障碍物之间的距离。
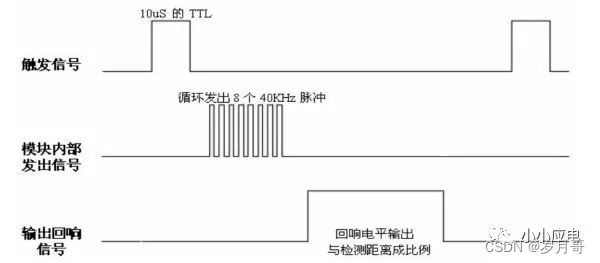
1、HC-SR04超声波模块工作原理
(1)采用IO口触发测距,给至少10us高电平脉冲;
(2)模块自动发送八个40khz方波,并自主检测是否有电波返回;
(3)当有信号返回时,通过IO口输出一个高电平,高电平的持续时间就是超声波从发送到返回的时间;
(4)测距公式:距离=(高电平时间*声速)/2;
.
.
超声波模块的时序图
.
.
.
.
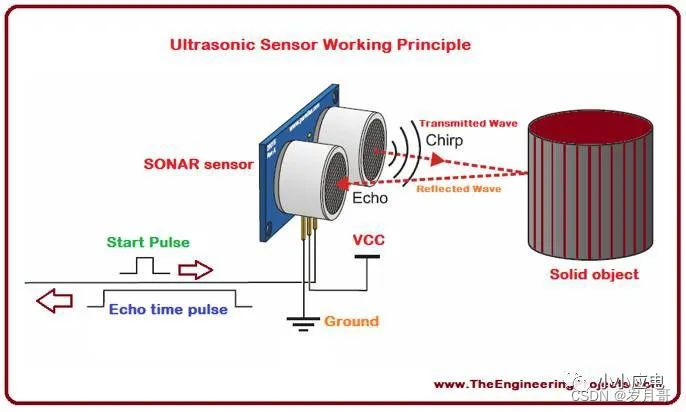
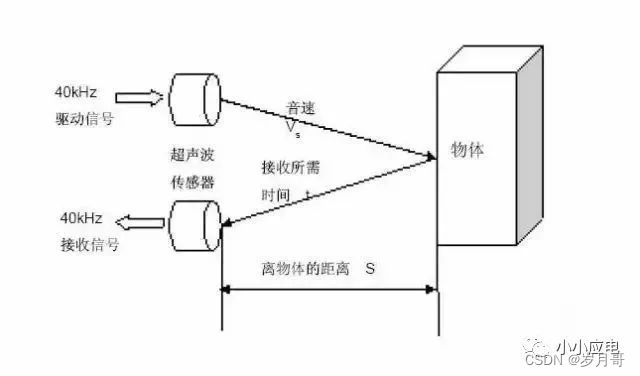
.(5)工作原理分析
.
.
.
.
.
.
.
科学家们将每秒钟振动的次数称为声音的频率,单位是赫兹(Hz)。而我们人类耳朵能听到的声波频率为20Hz~20000Hz。因此,我们把频率高于20000Hz的声波称为“超声波”。超声波的方向性好,反射能力强,易于获得较集中的声能。人们利用超声波的特性制成超声波传感器,广泛应用于汽车领域。我们所说的倒车雷达就是超声波传感器。倒车雷达在倒车时,利用超声波原理,由装置在车尾保险杠上的探头发送超声波撞击障碍物后反射此声波,计算出车体与障碍物间的实际距离,用蜂鸣器和指示灯告诉司机障碍物与汽车之间的大致距离和方向,以便驾驶员及时调整方位,解除驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰。
.
.
.
超声波测距仿真加程序下载
.
.
链接:https://pan.baidu.com/s/1YI4zDiMxkmxH0GPP2mIq0g
提取码:aaaa复制上面链接到浏览器,即可打开下载
希望同学们喜欢了! -
相关阅读:
TYPE-C接口桌面显示器:视频与充电的双重革新
Python Selenium 八大元素定位方法(下)
C++ this指针
竞赛 深度学习实现行人重识别 - python opencv yolo Reid
需求响应|动态冰蓄冷系统与需求响应策略的优化研究(Matlab代码实现)
第13章 并发编程高阶(二)
System Synthesis
【Java】从0开始个人网站建立(三)博客主页文章分页查询,预览显示
Unity Shader—05 Unity中的纹理采样
AOP相关概念总结
- 原文地址:https://blog.csdn.net/baidu_38915797/article/details/125458388