-
ROS 笔记(06)— 话题消息的定义和使用
ROS中通过std_msgs封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个data字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如:激光雷达的信息…std_msgs由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型。msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:- int8, int16, int32, int64 (或者无符号类型: uint*)
- float32, float64
- string
- time, duration
- other msg files
- variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。1. 话题模型
我们要实现的话题模型如下:
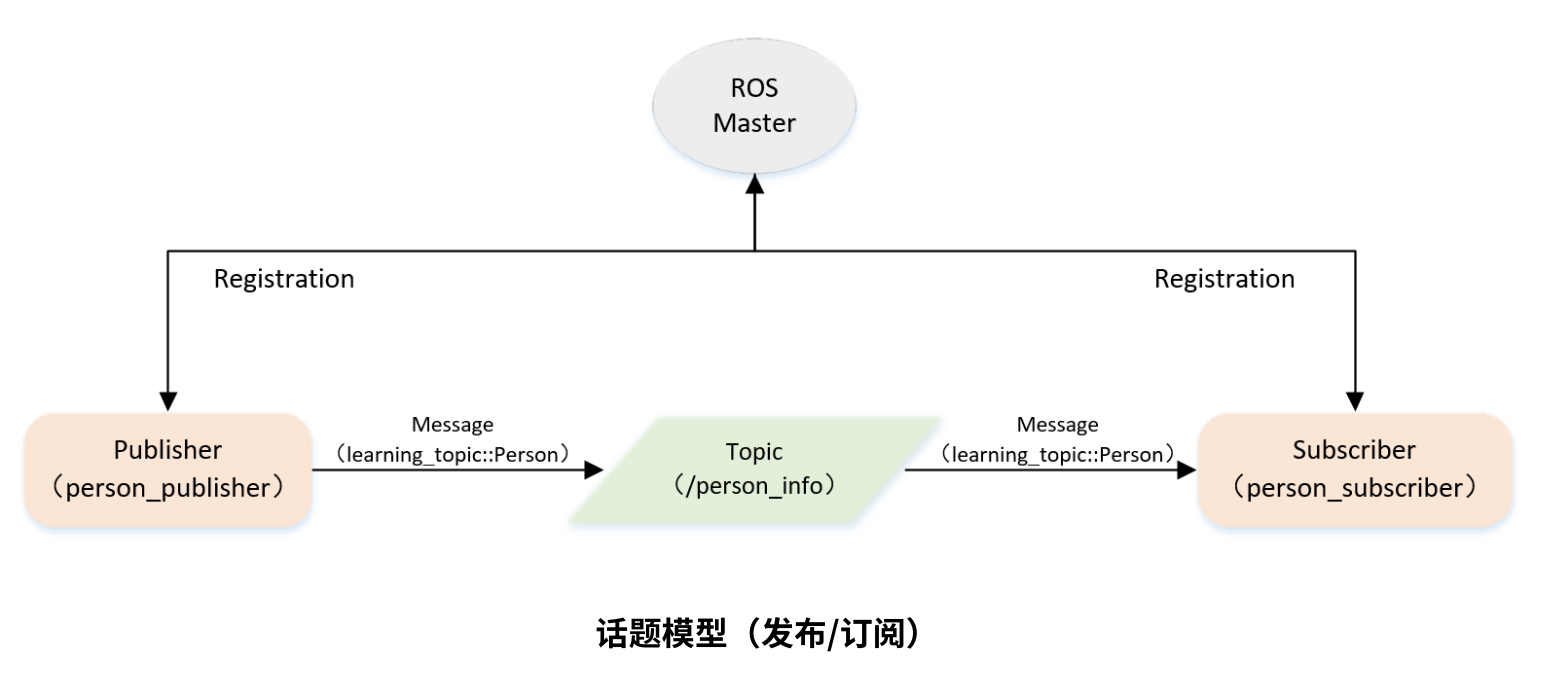 其中
其中 Message中的Person为我们自定义的消息格式,该消息在订阅者和发布者之间传递。2. 自定义消息实现
2.1 定义 msg 文件
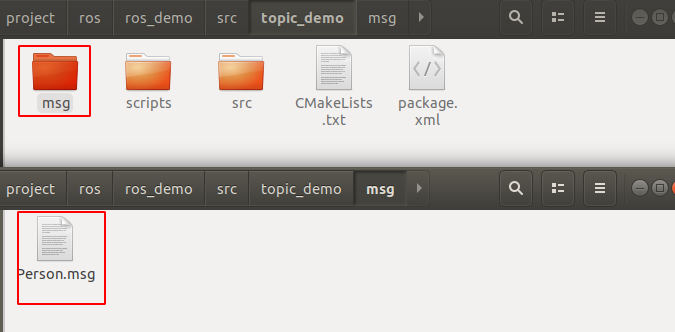
在功能包
topic_demo目录下创建一个msg文件夹,在该文件夹中创建一个Person.msg文件,如下图所示:
Person.msg中有我们自定义的消息格式string name uint8 age uint8 gender uint8 unknown = 0 uint8 male = 1 uint8 female = 2- 1
- 2
- 3
- 4
- 5
- 6
- 7
2.2 添加功能包依赖
在
package.xml中添加以下exec_depend运行依赖:<exec_depend>message_generation</exec_depend> <exec_depend>message_runtime</exec_depend>- 1
- 2
2.3 添加编译选项
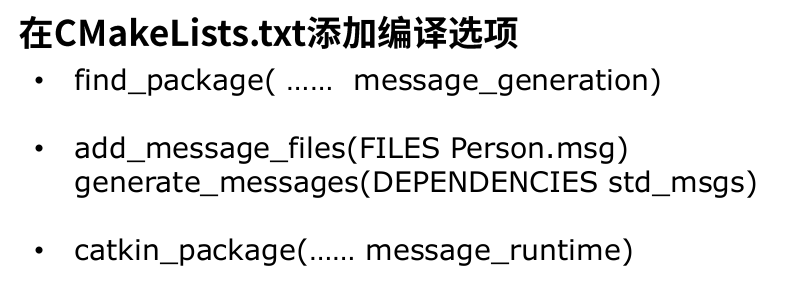
find_package(catkin REQUIRED COMPONENTS geometry_msgs rospy std_msgs turtlesim message_generation # 新增内容- 1
- 2
- 3
- 4
- 5
- 6
add_message_files( FILES Person.msg )- 1
- 2
- 3
- 4
generate_messages( DEPENDENCIES std_msgs )- 1
- 2
- 3
- 4
catkin_package( # INCLUDE_DIRS include # LIBRARIES topic_demo CATKIN_DEPENDS geometry_msgs rospy std_msgs turtlesim message_runtime # DEPENDS system_lib )- 1
- 2
- 3
- 4
- 5
- 6
2.4 编译生成语言相关的文件
到项目根目录下执行
catkin_make命令$ catkin_make Base path: /home/wohu/project/ros/ros_demo Source space: /home/wohu/project/ros/ros_demo/src Build space: /home/wohu/project/ros/ros_demo/build Devel space: /home/wohu/project/ros/ros_demo/devel Install space: /home/wohu/project/ros/ros_demo/install #### #### Running command: "make cmake_check_build_system" in "/home/wohu/project/ros/ros_demo/build" #### #### #### Running command: "make -j12 -l12" in "/home/wohu/project/ros/ros_demo/build" #### [ 0%] Built target std_msgs_generate_messages_py [ 0%] Built target std_msgs_generate_messages_eus [ 0%] Built target std_msgs_generate_messages_lisp [ 0%] Built target std_msgs_generate_messages_nodejs [ 0%] Built target std_msgs_generate_messages_cpp [ 0%] Built target _topic_demo_generate_messages_check_deps_Person [ 57%] Built target topic_demo_generate_messages_py [ 57%] Built target topic_demo_generate_messages_eus [ 71%] Built target topic_demo_generate_messages_cpp [ 85%] Built target topic_demo_generate_messages_nodejs [100%] Built target topic_demo_generate_messages_lisp [100%] Built target topic_demo_generate_messages- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
可以看到会生成各种语言的代码文件。其中
Python相关的代码文件在/devel/lib/python2.7/dist-packages- 1
目录下
2.5 运行代码
发布者代码
person_publisher.py:#!/usr/bin/env python # -*- coding: utf-8 -*- # 该例程将发布/person_info话题,自定义消息类型learning_topic::Person import rospy from topic_demo.msg import Person def velocity_publisher(): # ROS节点初始化 rospy.init_node('person_publisher', anonymous=True) # 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10 person_info_pub = rospy.Publisher('/person_info', Person, queue_size=10) #设置循环的频率 rate = rospy.Rate(10) while not rospy.is_shutdown(): # 初始化learning_topic::Person类型的消息 person_msg = Person() person_msg.name = "Tom"; person_msg.age = 18; person_msg.gender = Person.male; # 发布消息 person_info_pub.publish(person_msg) rospy.loginfo("Publsh person message[%s, %d, %d]", person_msg.name, person_msg.age, person_msg.gender) # 按照循环频率延时 rate.sleep() if __name__ == '__main__': try: velocity_publisher() except rospy.ROSInterruptException: pass- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
订阅者代码
person_subscriber.py内容:#!/usr/bin/env python # -*- coding: utf-8 -*- # 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person import rospy from topic_demo.msg import Person def personInfoCallback(msg): rospy.loginfo("Subcribe Person Info: name:%s age:%d gender:%d", msg.name, msg.age, msg.gender) def person_subscriber(): # ROS节点初始化 rospy.init_node('person_subscriber', anonymous=True) # 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback rospy.Subscriber("/person_info", Person, personInfoCallback) # 循环等待回调函数 rospy.spin() if __name__ == '__main__': person_subscriber()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
运行代码命令:
$ cd ~/catkin_ws $ catkin_make $ source ./devel/setup.bash $ rescore $ rosrun topic_demo person_subscriber.py $ rosrun topic_demo person_publisher.py- 1
- 2
- 3
- 4
- 5
- 6
-
相关阅读:
[附源码]java毕业设计人口老龄化社区服务与管理平台
基于协同算法的电子商务网站用户行为分析及服务推荐
基于JAVA商品限时秒杀系统计算机毕业设计源码+数据库+lw文档+系统+部署
uniapp自定义底部导航
docker源码编译
Stability derivatives
我的CS Master毕业之路|猿创征文
市场整改篇之应用宝报告
银行分布式持久化存储系统方案设计
Jenkins
- 原文地址:https://blog.csdn.net/wohu1104/article/details/125350119