-
Opencv中的MeanShift图像分割和视频背景分离(python实现)
1.MeanShift原理
(1)严格来说该方法并不是用来对图像进行分割的,而是在彩色层面的平滑滤波;
(2)它会中和色彩分布相近的颜色,平滑色彩细节,侵蚀掉那些面积较小的颜色区域;
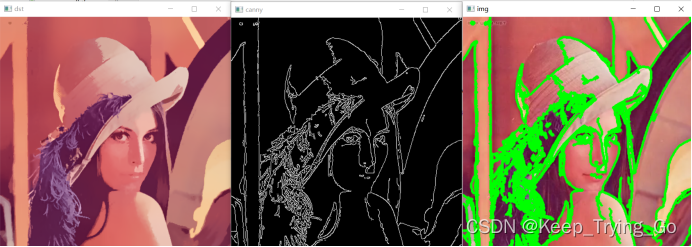
(3)它以图像上任一点P为圆心,半径为sp,色彩幅值为sr进行不断的迭代;pyrMeanShiftFiltering(src, sp, sr, dst=None, maxLevel=None, termcrit=None):- 1
Src:输入的原始图像;
Sp:双精度半径,值越大,模糊程度越大;
Sr:色彩的幅值变化范围,变化范围越大,连成一片区域的也就是越大。
Dst:输出的图像;
maxLevel:默认值为1;
Termcrit:终止标准:何时停止meanshift迭代。import os import cv2 import numpy as np img=cv2.imread('images/lenna.png') img=cv2.resize(src=img,dsize=(450,450)) #图像分割 dst=cv2.pyrMeanShiftFiltering(src=img,sp=20,sr=30) #图像分割(边缘的处理) canny=cv2.Canny(image=dst,threshold1=30,threshold2=100) #查找轮廓 conturs,hierarchy=cv2.findContours(image=canny,mode=cv2.RETR_EXTERNAL,method=cv2.CHAIN_APPROX_SIMPLE) #画出轮廓 cv2.drawContours(image=img,contours=conturs,contourIdx=-1,color=(0,255,0),thickness=3) cv2.imshow('img',img) cv2.imshow('dst',dst) cv2.imshow('canny',canny) cv2.waitKey(0) cv2.destroyAllWindows() if __name__ == '__main__': print('Pycharm')- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
Canny边缘检测算法:
https://mydreamambitious.blog.csdn.net/article/details/125116318
图像查找findHomography:
https://mydreamambitious.blog.csdn.net/article/details/125385752
2.视频前后景分离
(1)MOG2去除背景
在createBackgroundSubtractorMOG的基础上进行了改进;
混合高斯模型为基础的前景或者背景分割算法
createBackgroundSubtractorMOG2(history=None, varThreshold=None, detectShadows=None):- 1
History:进行建模的需要多长的参考帧,默认值为200;
varThreshold:判断背景模型是否能很好地描述像素。
detectShadows:阴影检测;import os import cv2 import numpy as np #打开摄像头 cap=cv2.VideoCapture('video/University_Traffic.mp4') #创建前景分离对象 bgsegment=cv2.createBackgroundSubtractorMOG2() while cap.isOpened(): OK,frame=cap.read() if OK==False: break frame=cv2.resize(src=frame,dsize=(500,500)) fgmask=bgsegment.apply(frame) cv2.imshow('img',fgmask) if cv2.waitKey(1)&0xFF==27: break cap.release() cv2.destroyAllWindows() if __name__ == '__main__': print('Pycharm')- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25

从视频帧中可以看到MOG2产生了很多的噪点,所以对此提出了改进的方法:
GMG去除背景的方法:
静态背景图估计和每个像素的贝叶斯分割抗噪性更强; -
相关阅读:
lammps已跑完,不想重跑,如何补充新的计算?
灯具行业MES解决方案,实现产品的正反向追溯
HTIML知识概述
PMO&PM必须知道的组织流程、业务、IT、质量和运营之间的关系详解
Elasticsearch许可证过期导致ES用不了的问题
【微信小程序】全局配置
全连接层及其注意力attention的参数量和计算量分析
前端 JS 经典:typeof 和 instanceof 区别
快速非支配排序 python版
VSCode自定义代码块详解
- 原文地址:https://blog.csdn.net/Keep_Trying_Go/article/details/125451244