-
cartographer_optimization_problem_2d
0.引言
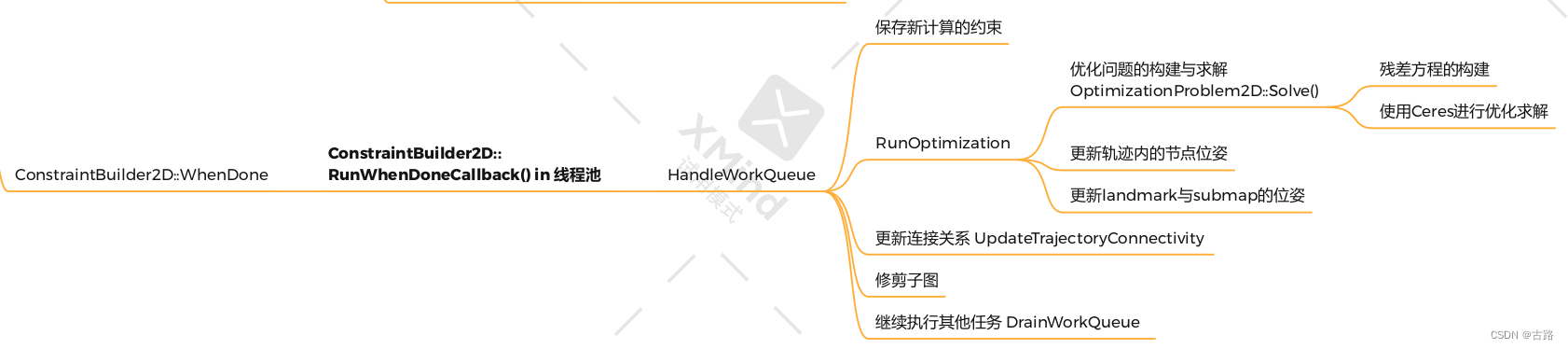
主要业务逻辑回到
mapping/internal/2d/pose_graph_2d.cc/PoseGraph2D::HandleWorkQueue-->RunOptimization()中。具体的优化这一部分就是在optimization中进行实现。前面计算约束结果为:
1.设置待优化变量
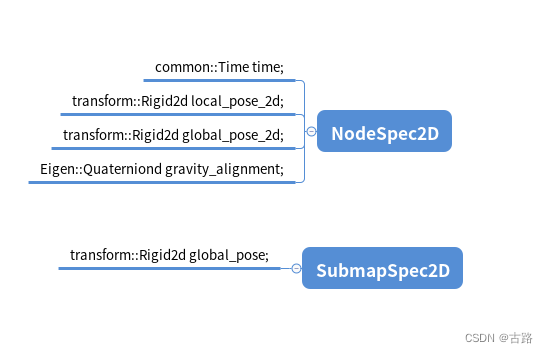
- 子图的global_pose
- 节点的global_pose_2d
2.残差项
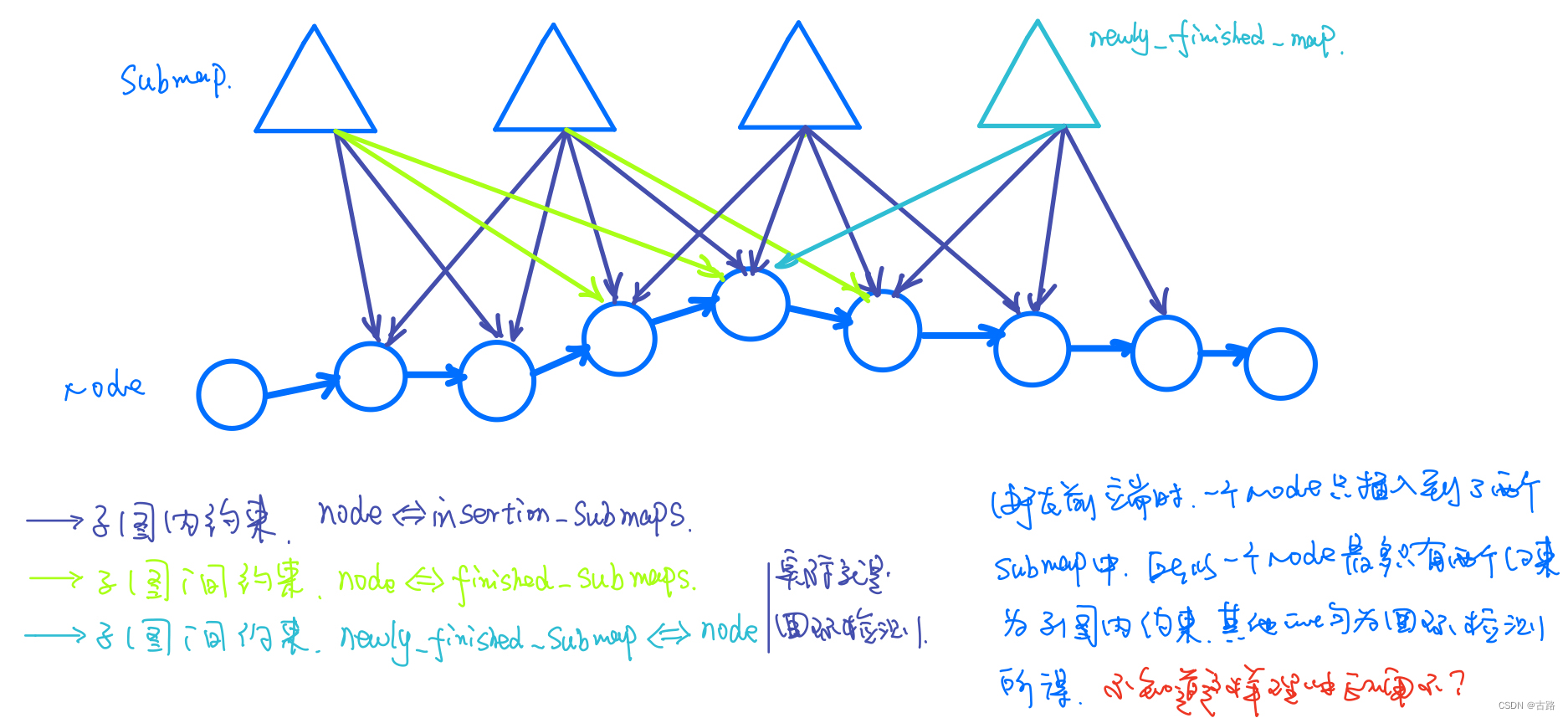
2.1.第一种残差-scan_match
将节点与子图原点在global坐标系下的相对位姿 与 约束 的差值作为残差项
- 第一种坐标变换: 节点与子图原点在global坐标系下的坐标变换(预测位姿)
- 第二种坐标变换: 子图内约束与子图间约束(测量位姿)

残差计算代码:
/** * @brief 2d 根据SPA论文里的公式求残差 * * 计算残差: * T12 = T1.inverse() * T2 * [R1.inverse * R2, R1.inverse * (t2 -t1)] * [0 , 1 ] * * @param[in] relative_pose * @param[in] start * @param[in] end * @return std::array<T, 3> */ template <typename T> static std::array<T, 3> ComputeUnscaledError( const transform::Rigid2d& relative_pose, const T* const start, const T* const end) { // 旋转矩阵R const T cos_theta_i = cos(start[2]); const T sin_theta_i = sin(start[2]); const T delta_x = end[0] - start[0]; // t2 -t1 const T delta_y = end[1] - start[1]; const T h[3] = {cos_theta_i * delta_x + sin_theta_i * delta_y, // R.inverse * (t2 -t1) -sin_theta_i * delta_x + cos_theta_i * delta_y, end[2] - start[2]}; return {{T(relative_pose.translation().x()) - h[0], T(relative_pose.translation().y()) - h[1], common::NormalizeAngleDifference( T(relative_pose.rotation().angle()) - h[2])}}; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
2.2.第二种残差-Landmark
landmark数据 与 通过2个节点位姿插值出来的相对位姿 的差值作为残差项
- 第一种坐标变换: landmark数据的时间在2个节点位姿中插值出来的位姿(预测位姿)
- 第二种坐标变换: landmark数据中的landmark_to_tracking_transform_(测量位姿)
struct LandmarkNode { // landmark数据是相对于tracking_frame的相对坐标变换 struct LandmarkObservation { int trajectory_id; common::Time time; transform::Rigid3d landmark_to_tracking_transform; double translation_weight; double rotation_weight; }; // 同一时刻可能会观测到多个landmark数据 std::vector<LandmarkObservation> landmark_observations; // 这帧数据对应的tracking_frame在global坐标系下的位姿 absl::optional<transform::Rigid3d> global_landmark_pose; bool frozen = false; };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
主要是
node <--> landmark之间的约束:// Step: landmark数据 与 通过2个节点位姿插值出来的相对位姿 的差值作为残差项 AddLandmarkCostFunctions(landmark_nodes, node_data_, &C_nodes, &C_landmarks, &problem, options_.huber_scale());- 1
- 2
- 3
略.
2.3.第三种残差-Odometer
节点与节点间在global坐标系下的相对坐标变换 与 通过里程计数据插值出的相对坐标变换 的差值作为残差项
- 第一种坐标变换: 相邻2个节点间在global坐标系下的坐标变换
- 第二种坐标变换: 再分别计算这2个节点的时间在里程计数据队列中插值得到的2个里程计位姿, 计算这2个里程计位姿间的坐标变换
2.4.第四种残差-local_global
节点与节点间在global坐标系下的相对坐标变换 与 相邻2个节点在local坐标系下的相对坐标变换 的差值作为残差项
- 第一种坐标变换: 相邻2个节间在global坐标系下的坐标变换
- 第二种坐标变换: 相邻2个节点在local坐标系下的坐标变换
2.5.第五种残差-gps
节点与gps坐标系原点在global坐标系下的相对坐标变换 与 通过gps数据进行插值得到的相对坐标变换 的差值作为残差项
- 第一种坐标变换: 节点对应的时刻在gps数据中插值得到的gps相对于gps坐标系原点的位姿
- 第二种坐标变换: 节点在global坐标系下 与 gps坐标系原点 的相对坐标变换
3.理论参考
-
相关阅读:
Vue2里监听localstorage里值的变化
java项目开发实例spring boot框架实现的理财记账财务管理系统
JavaWeb(十一) AJAX + json
机器学习训练与参数优化的一般过程 (讨论)
日本购物网站的网络乞丐功能
CSAPP 之 DataLab 详解
数据集 | 目录一览表
如何在CentOS7上搭建自己的GitLab仓库
性能测试 —— Jmeter 命令行详细
MTK Logo 逆向解析之 rawx 全解压
- 原文地址:https://blog.csdn.net/fb_941219/article/details/125423489