-
【PCL自学:Segmentation3】基于PCL的点云分割:区域增长分割
一、什么是区域增长分割
在本文中,我们将学习如何使用pcl:: regiongrow类中实现的区域增长算法。所述算法的目的是将在平滑性约束方面足够接近的点分类。因此,该算法的输出是聚类的集合,其中每个聚类都是一组点,被认为是同一光滑曲面的一部分。该算法的工作是基于点法线之间角度的比较。
二、区域增长分割原理剖析
让我们来看看该算法是如何工作的。
1.首先,它根据它们的曲率值对点进行分类。之所以要这样做是因为这个区域从曲率最小的点开始增长。这是因为曲率最小的点位于平坦的区域(从最平坦的区域增长可以减少分割总数)。
2.选中的点被添加到名为seeds(增长种子集合)的集合中。
3.对于每个种子点,算法找到它的邻近点。
a.每个邻居都被计算它的法线和当前种子点的法线之间的角度。如果角度小于阈值,则将当前点添加到当前种子所在区域。
b.然后对每个邻域进行曲率值测试。如果曲率小于阈值,则将此点添加到种子集合中作为新种子。
c.从种子集合中删除当前的种子。
4.如果种子集变成空的,这意味着算法扩大了区域,这个过程从头开始重复迭代,直到种子集合为空。三、区域增长分割示例代码
#include <iostream> #include <vector> #include <pcl/point_types.h> #include <pcl/io/pcd_io.h> #include <pcl/search/search.h> #include <pcl/search/kdtree.h> #include <pcl/features/normal_3d.h> #include <pcl/visualization/cloud_viewer.h> #include <pcl/filters/filter_indices.h> // for pcl::removeNaNFromPointCloud #include <pcl/segmentation/region_growing.h> int main () { // 读取点云pcd文件 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); if ( pcl::io::loadPCDFile <pcl::PointXYZ> ("region_growing_tutorial.pcd", *cloud) == -1) { std::cout << "Cloud reading failed." << std::endl; return (-1); } // 建立搜索KD树 pcl::search::Search<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ>); // 计算点云法向 pcl::PointCloud <pcl::Normal>::Ptr normals (new pcl::PointCloud <pcl::Normal>); pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimator; normal_estimator.setSearchMethod (tree); // 搜索方法为kd树走索 normal_estimator.setInputCloud (cloud); // 填入点云 normal_estimator.setKSearch (50); // 设置搜索范围 normal_estimator.compute (*normals); // 将法相保存在normals pcl::IndicesPtr indices (new std::vector <int>); pcl::removeNaNFromPointCloud(*cloud, *indices); // 对点云建立索引 pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> reg; // 区域增长类 reg.setMinClusterSize (50); // 设置最小的集合点数 reg.setMaxClusterSize (1000000); // 设置最大集合点数 reg.setSearchMethod (tree); // 设置kd树搜索方法 reg.setNumberOfNeighbours (30); // 设置每次邻域搜索数(影响计算速度) reg.setInputCloud (cloud); // 设置输入点云 reg.setIndices (indices); // 设置输入的索引 reg.setInputNormals (normals); // 设置输入法向 reg.setSmoothnessThreshold (3.0 / 180.0 * M_PI); // 设置平滑度阈值(弧度) reg.setCurvatureThreshold (1.0); // 设置曲率阈值 // 分类集合 并开始计算 std::vector <pcl::PointIndices> clusters; reg.extract (clusters); // 一系列输出 std::cout << "Number of clusters is equal to " << clusters.size () << std::endl; std::cout << "First cluster has " << clusters[0].indices.size () << " points." << std::endl; std::cout << "These are the indices of the points of the initial" << std::endl << "cloud that belong to the first cluster:" << std::endl; std::size_t counter = 0; while (counter < clusters[0].indices.size ()) { std::cout << clusters[0].indices[counter] << ", "; counter++; if (counter % 10 == 0) std::cout << std::endl; } std::cout << std::endl; // 显示出分割后的点云,并赋予不同颜色 pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud (); pcl::visualization::CloudViewer viewer ("Cluster viewer"); viewer.showCloud(colored_cloud); while (!viewer.wasStopped ()) { } return (0); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
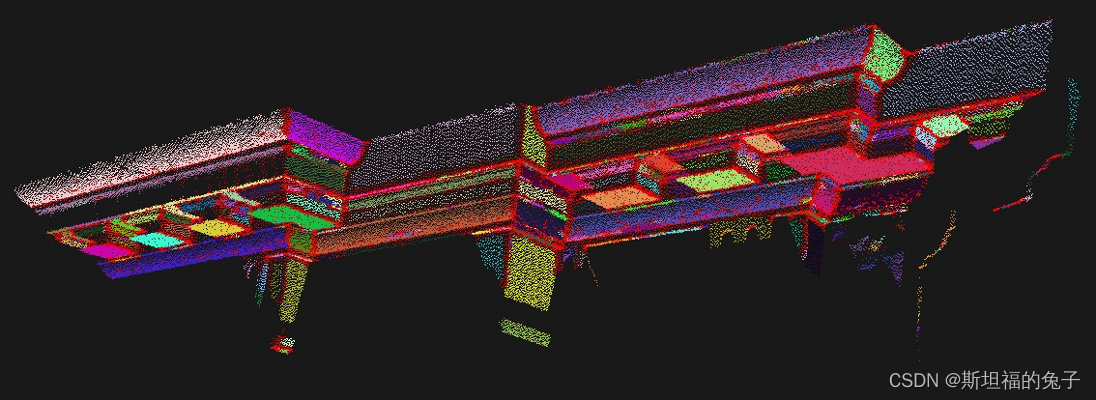
运行效果如下:
【博主简介】
斯坦福的兔子,男,天津大学工学硕士。毕业至今从事光学三维成像及点云处理相关工作。因工作中使用的三维处理库为公司内部库,不具有普遍适用性,遂自学开源PCL库及其相关数学知识以备使用。谨此将自学过程与君共享。
博主才疏学浅,尚不具有指导能力,如有问题还请各位在评论处留言供大家共同讨论。’ -
相关阅读:
小蓝的漆房——算法思路
搭个网页应用,让ChatGPT帮我写SQL
8┃音视频直播系统之 WebRTC 信令系统实现以及通讯核心并实现视频通话
【快速上手系列】使用支付宝沙箱环境进行支付测试的快速上手
C# 设计保存文件
docker图形胡界面管理工具--Portainer可视化面板安装
Unity --- 动画分层
三款数据可视化工具深度解析:Tableau、ECharts与山海鲸可视化
WPF知识小结(3)
这是什么代码你能看懂吗
- 原文地址:https://blog.csdn.net/weixin_41966507/article/details/125422539