-
考研数据结构——(图)
考研数据结构——图
一、 图的基本概念
1.1 基本概念
1.1.1 图的 定义
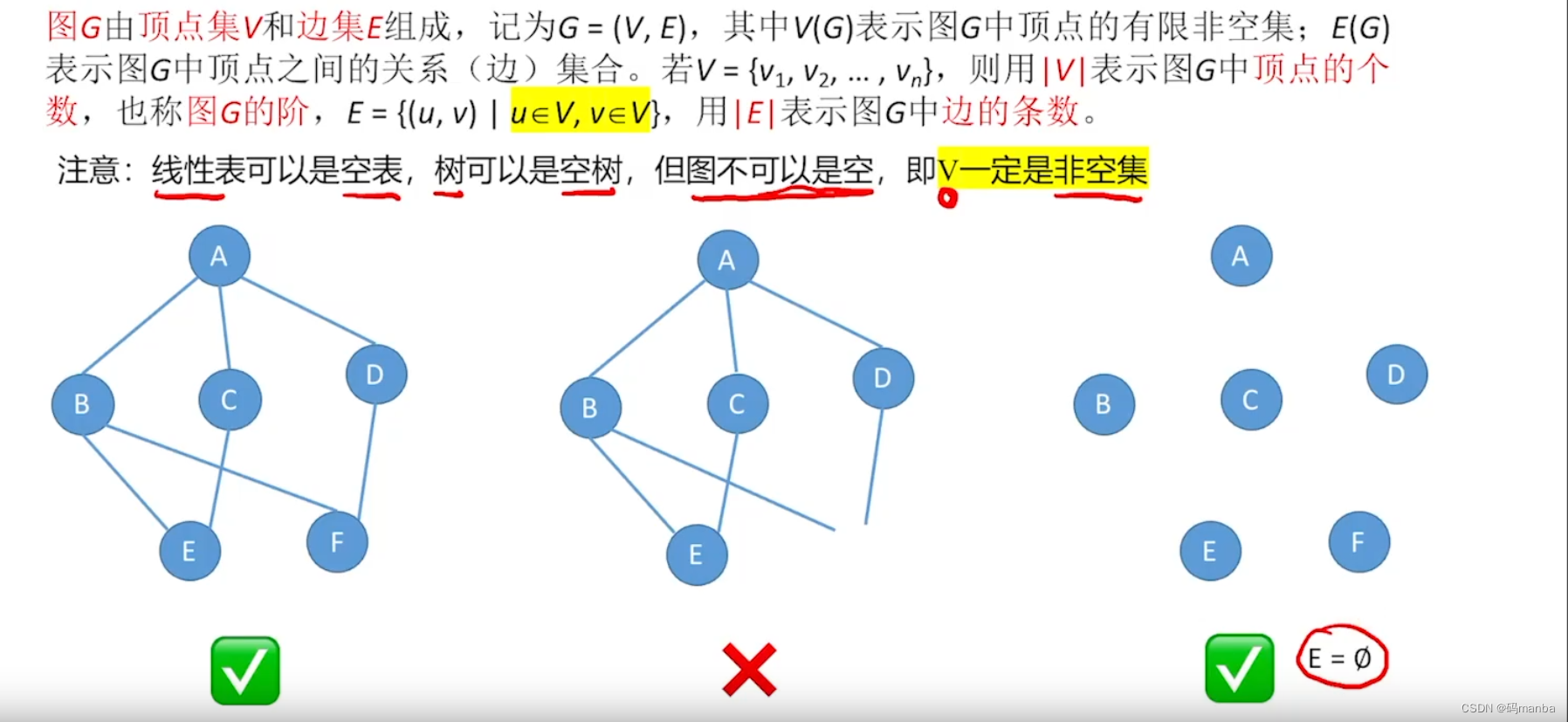
在 以后 设计 交友类软件的时候。
好友关系通过无向图实现。
关注关系通过有向图实现。
1.1.2 各种术语概念
有向图、无向图

简单图、多重图

顶点的度(入度、出度)

路径、路径长度、回路、简单回路、 简单路径、距离、 连通(无向图)、 强连通(有向图)

连通图、强连通图

子图、生成子图

连通分量、强连通分量


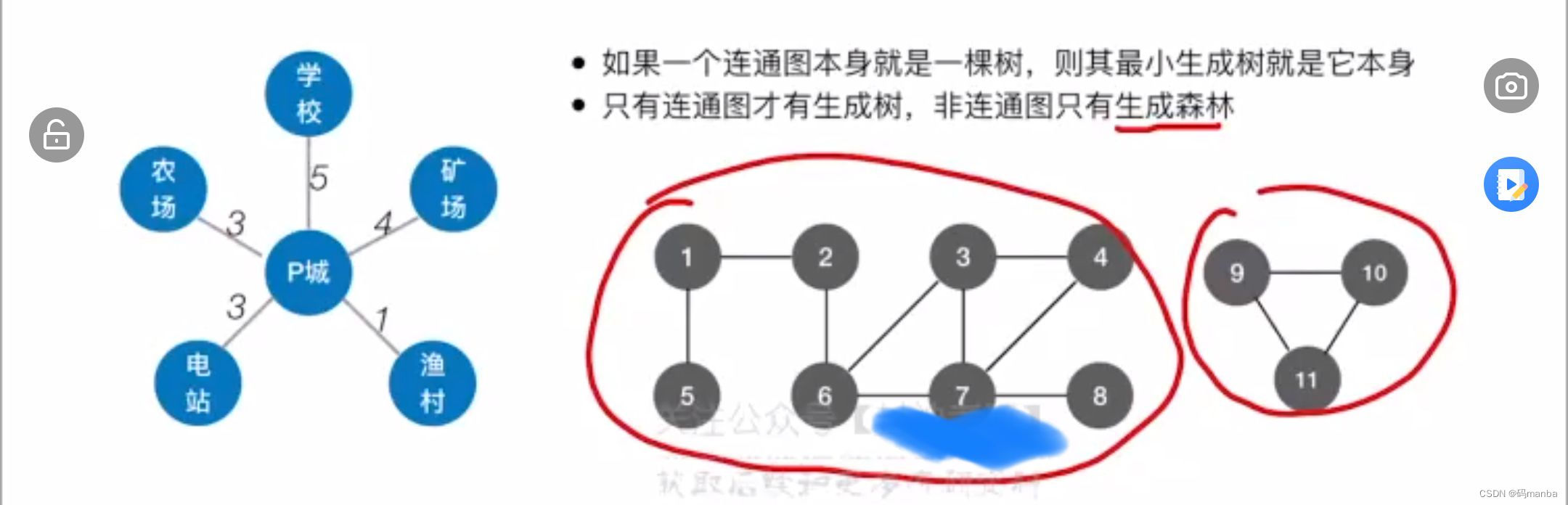
生成树、生成森林


边的 权、 带权图、 带权路径长度

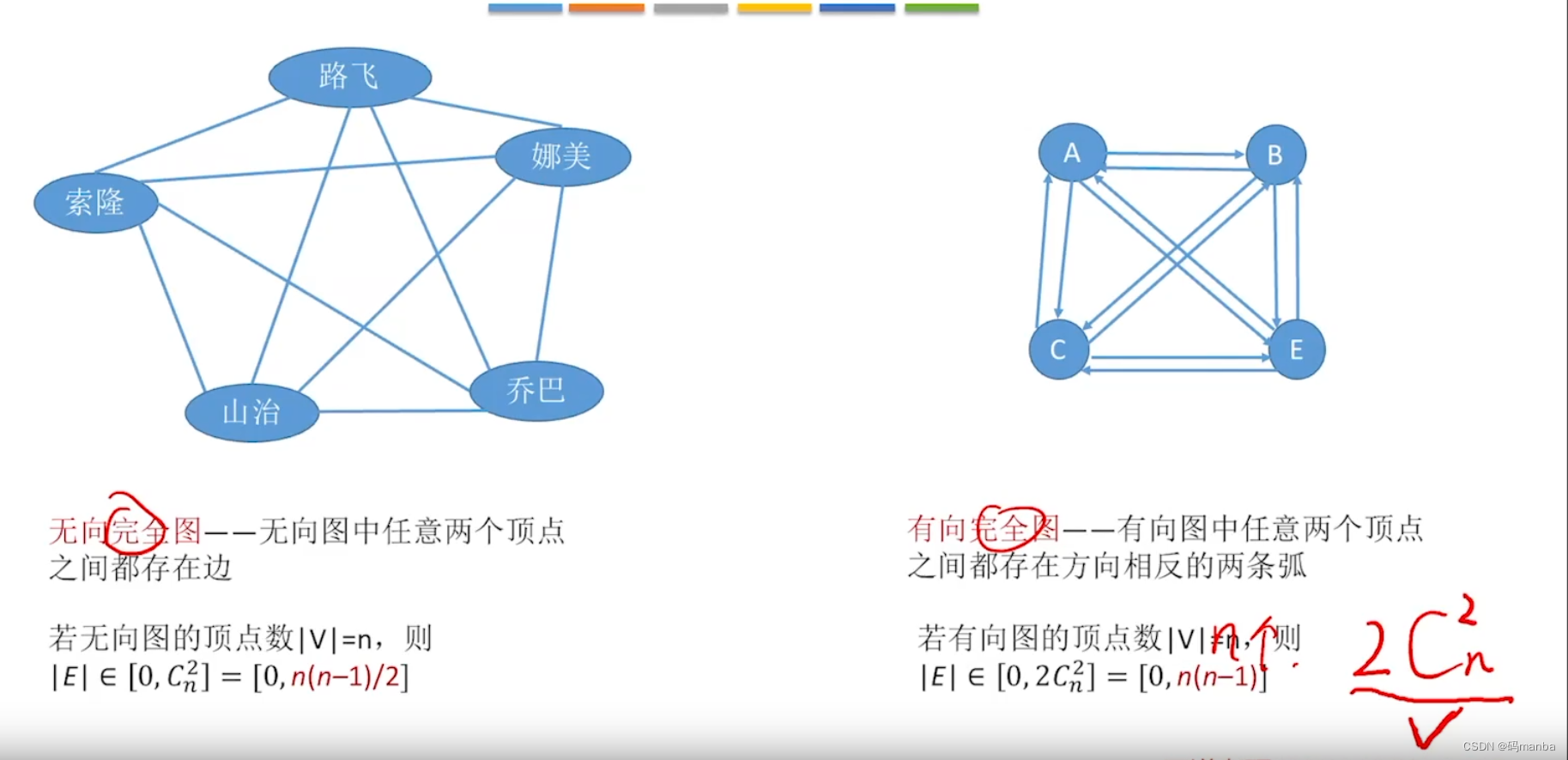
完全有向图、完全无向图
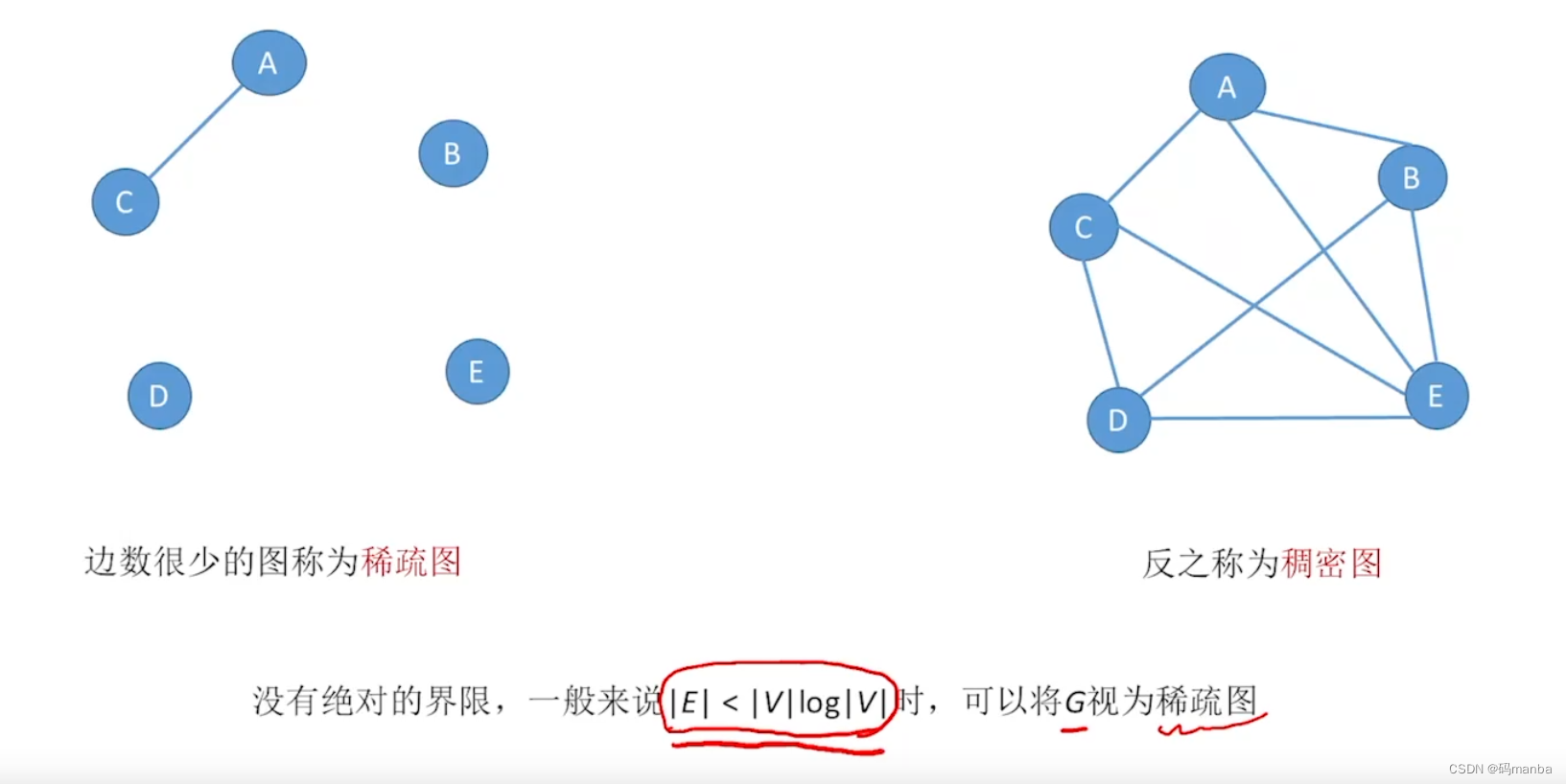
稀疏图、稠密图
树(无向图)、有向树(有向图)
- 树是 连通图
- 但 有向树 并不是 强连通图

小总结

二、 图的存储及基本操作
2.1 各种图的存储结构
1. 邻接矩阵法(思想与代码实现)
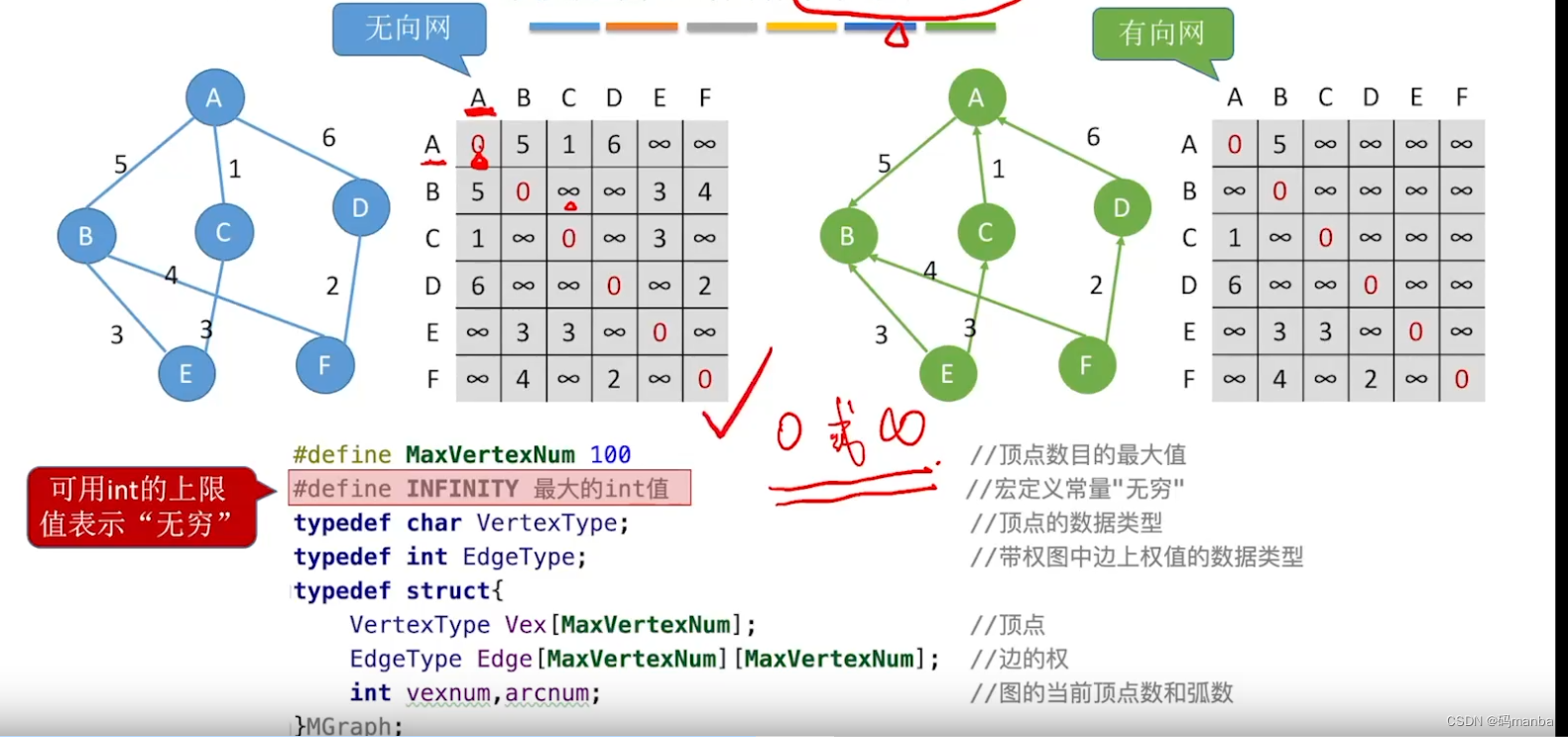
⭐ 介绍邻接绝阵
- 通过 一个 一维数组VEX 存储 顶点信息 (顶点表);
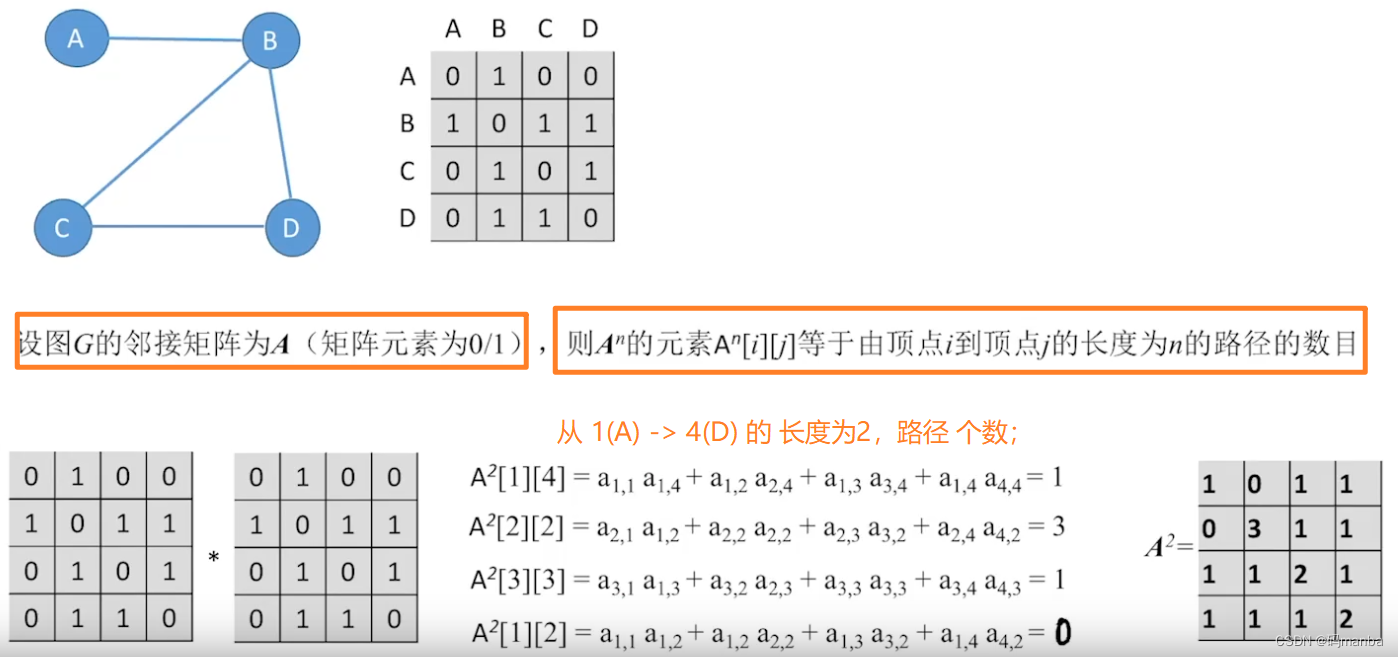
- 通过 一个二维bool数组 Edge 存储 两顶点对应是否有连接关系(邻接矩阵);
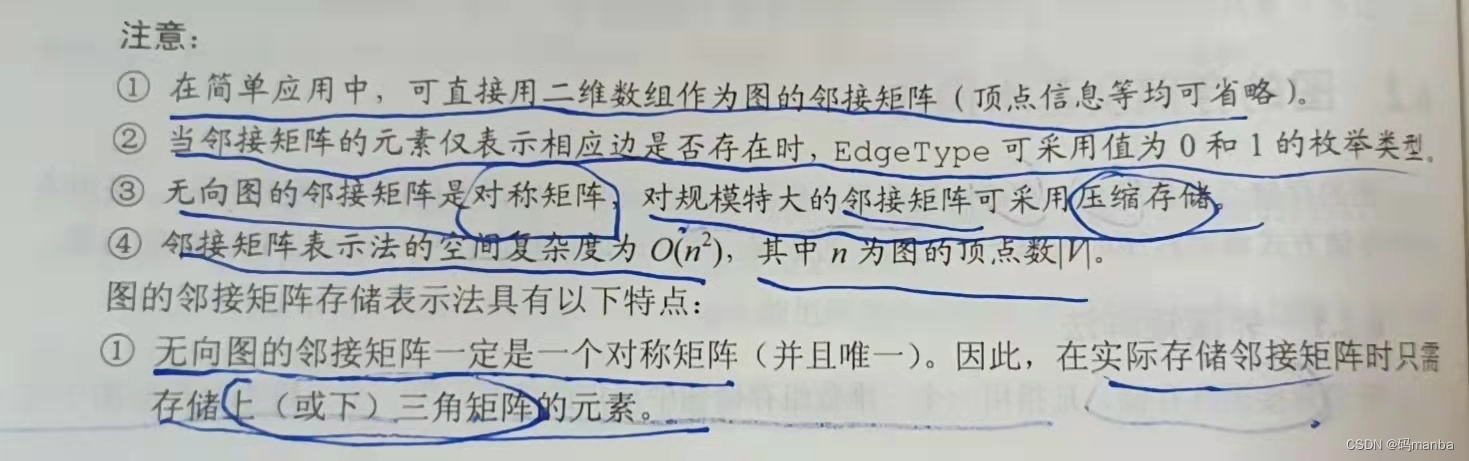
- 注意: 无向图的邻接矩阵是对称矩阵,可通压缩矩阵算法实现存储;

⭐ 通过邻接矩阵计算 顶点的度(有向/无向)

⭐ 带权邻接矩阵- 一般无穷表示两个顶点间无路径;
- 0表示 自己到自己;
⭐ 邻接矩阵 空间复杂度- 可通过 压缩矩阵存储 来 存储 无向图的 邻接 矩阵

⭐ 邻接 矩阵的 性质- 这个用来求,邻接矩阵的n次幂。 指 两个结点 直接 存在路径 长度为 n 的 个数;

2. 邻接表法
- 无向图的 邻接 表示法, 类似于 树的 孩子表示法;
- 通过 一个 顶点数组保存各个顶点, 每个顶点结点有自己的信息域和 第一个边域(指向一个邻接的点);
- 通过 边结点,连接每个结点的所有边, 每个边结点都有 指向哪个结点信息域,与 下一条边结点的指针域。

⭐ 邻接表 之 有向图 和 无向图- 当 求无向图的 每个结点的度的时候:
- 只需要 从结点域开始向后遍历即可;
- 当求 有向图的 每个 结点的 度的时候:
- 求出度,就是从顶点开始向后遍历链表;
- 求入度,就异常的困难!需要遍历每个结点边,对每个结点进行遍历判断,极非时间;

⭐ 对比 邻接表 与 邻接 矩阵

⭐ 邻接表的特点:

3. 十字链表法
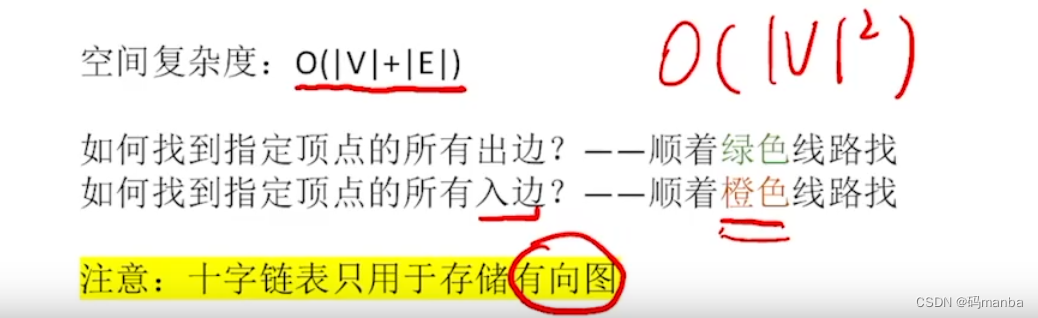
⭐ : 十字链表 只针对 与 有向图;
- 对于顶点结点:
- data: 存储顶点信息;
- firstin: 以 该顶点作为 弧头 的 第一条弧; 就是箭头所在端;
- firstout: 以 该顶点作为 弧尾 的 第一条弧; 就是没有箭头所在一端;
- 对于弧结点(就是边):
- tailvex: 指的弧尾编号;
- headvex: 指的弧头编号;
- tlink: 弧尾相同的 下一条弧;
- hlink: 弧头相同的 下一条弧;
- info: 弧的有关信息
- 将 图以具体图的形式转换成 十字链表, 具体思想;
- 找到一个点,该点所指向的 第一点 的 弧 用 firstout指向; 指向的弧结点 通过 tlink连接 弧尾相同的弧,也就是 该结点的剩余的所有弧;
- 找个的这个点, 被别的结点所指向 , 指向的弧 用该结点 的 firstin 指向。 所指向的弧结点的 同样串联相同的弧尾弧头指向;

⭐ 十字链表法 计算 出边 与 入边;- 计算某结点的入度;
- 在点结点 通过 firstin 指针域 指向 第一个 弧(该弧为该结点入度的弧)开始 遍历 弧结点的 headvex(指向有共同入边的其他弧结点)
- 计算某结点的出度:
- 从点结点的 firstout 指针域 指向的 第一个 弧(该弧为该结点出度的弧)开始 遍历 弧结点的 tailvex(指向 有共同出边的其他弧结点)
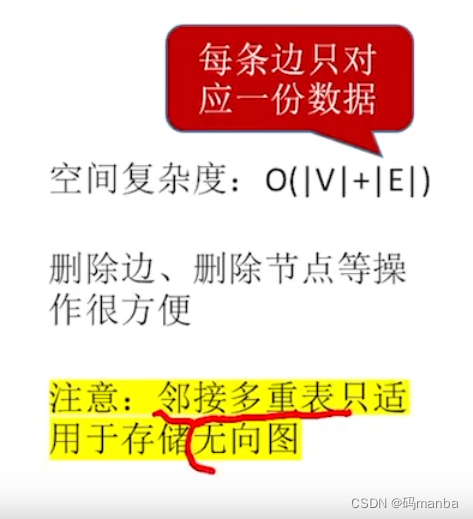
邻接多重表
属于 无向图
- 顶点结点:
- data: 存储该顶点的信息;
- firstedge: 指向该顶点 连接的 第一条边 的 弧结点;
- 边结点:
- i、j: 指的是 该边连接的 两个顶点编号
- ilink: 指的是 i 顶点,所连接的另一条边的 弧结点;
- jlink: 指的是 j 顶点,所连接的另一条边的 弧结点;

⭐ 邻接多重表的 分析
四大图的 存储 方式 总结

2.2 基于 邻接矩阵和邻接表的 图的基本操作
2.2.1 判断 两点之间 是否存在边
⭐ 无向图

⭐ 有向图

2.2.2 找出 图中 与 某 结点 连接的 所有边
⭐ 无向图

⭐ 有向图

2.2.3 在 图 中 插入 新结点
⭐ 有向图 无向图 一样

2.2.4 在 图 中 删除 一个 结点
⭐ 无向图

⭐ 有向图

2.2.5 在 图中 增加 一条边
⭐ 有向图 无向图 类似

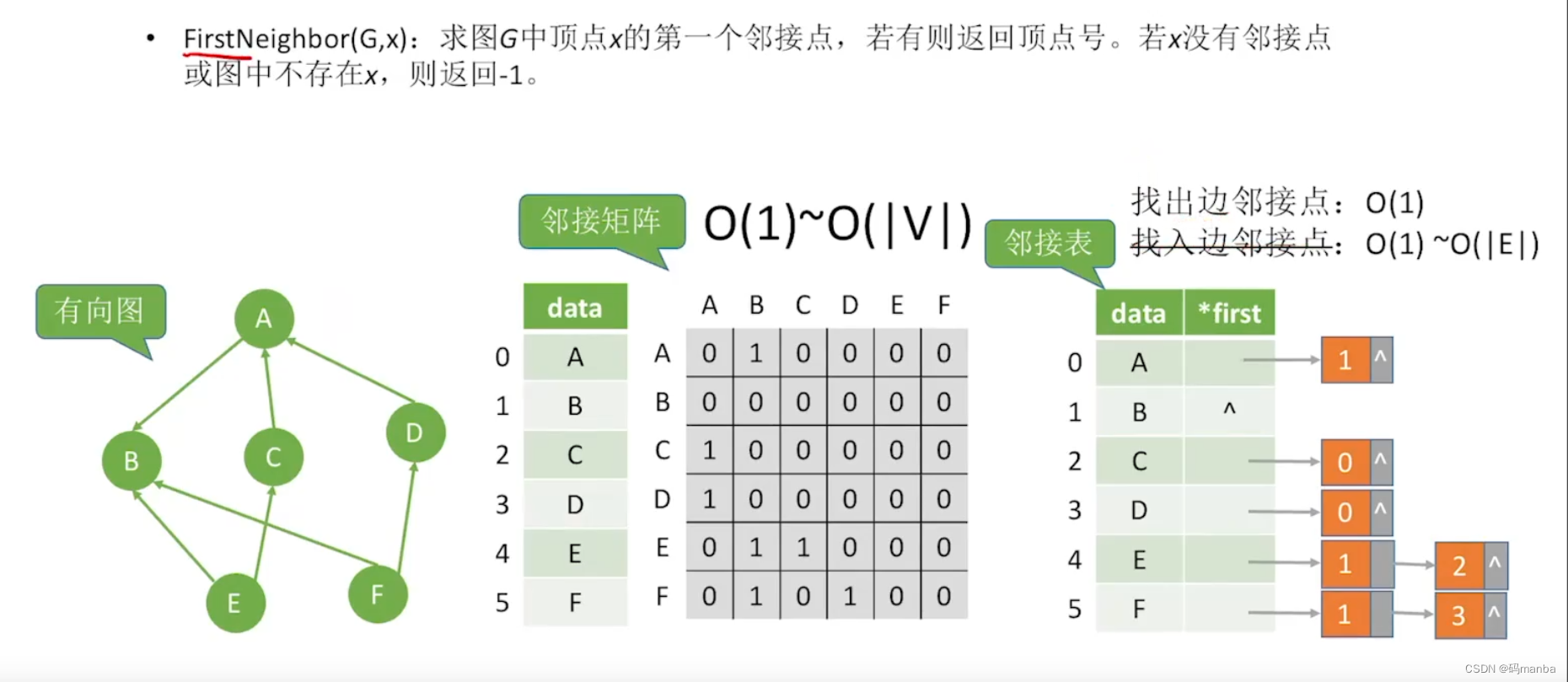
2.2.6 寻找 图 的 某节点 的 第一个 邻接点
⭐ 无向图

⭐ 有向图- 对于邻接 矩阵:
- 找n(n下标)出边就是 遍历 第n行
- 找n的入边就是 遍历 第n列
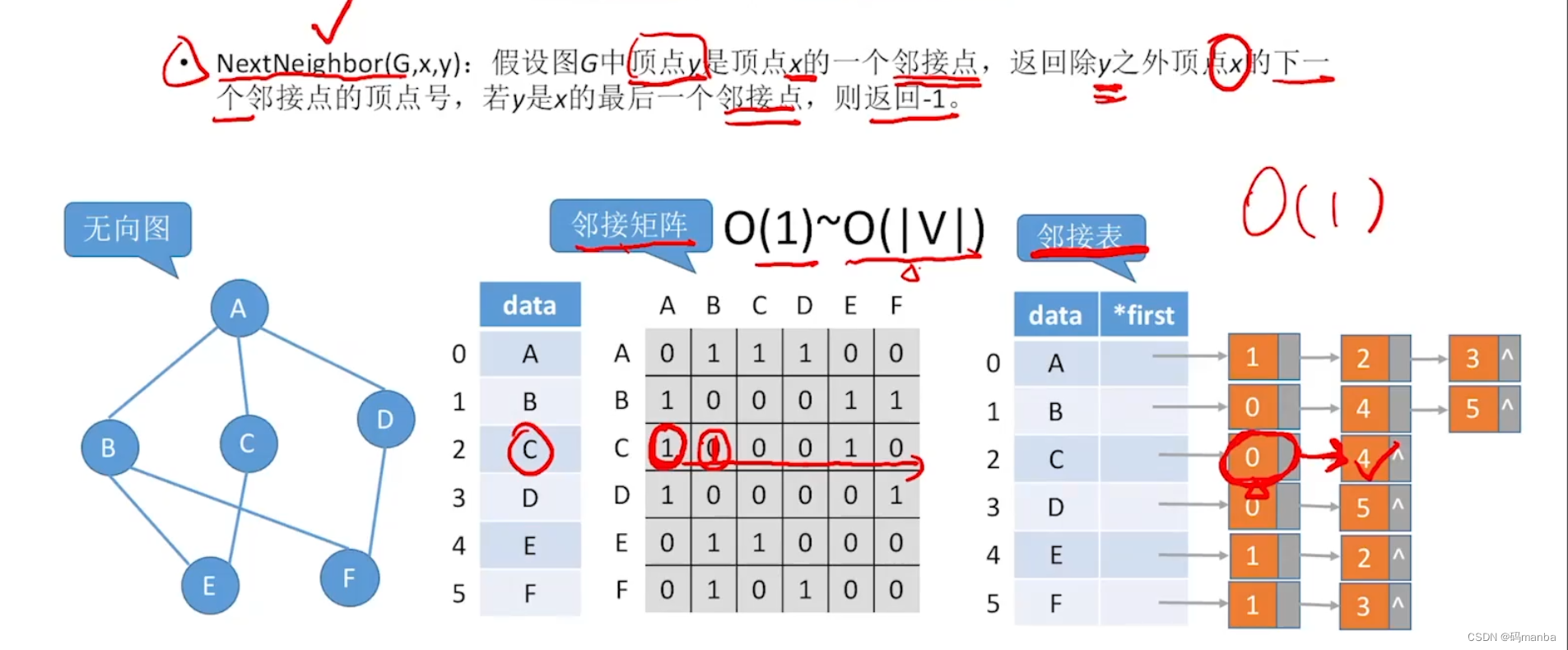
2.2.7 寻找图 的 某个 结点 的 第二个 邻接点
⭐ 无向图
2.2.8 设置/获取 某条边 的 权值
- 这个算法 核心就是 找到 要操作的边, 因此 时间复杂度就是 找边的 时间复杂度

2.2.9 基于 邻接矩阵和邻接表的 图的基本操作 小总结

三、图的遍历
3.1 图的广度优先遍历
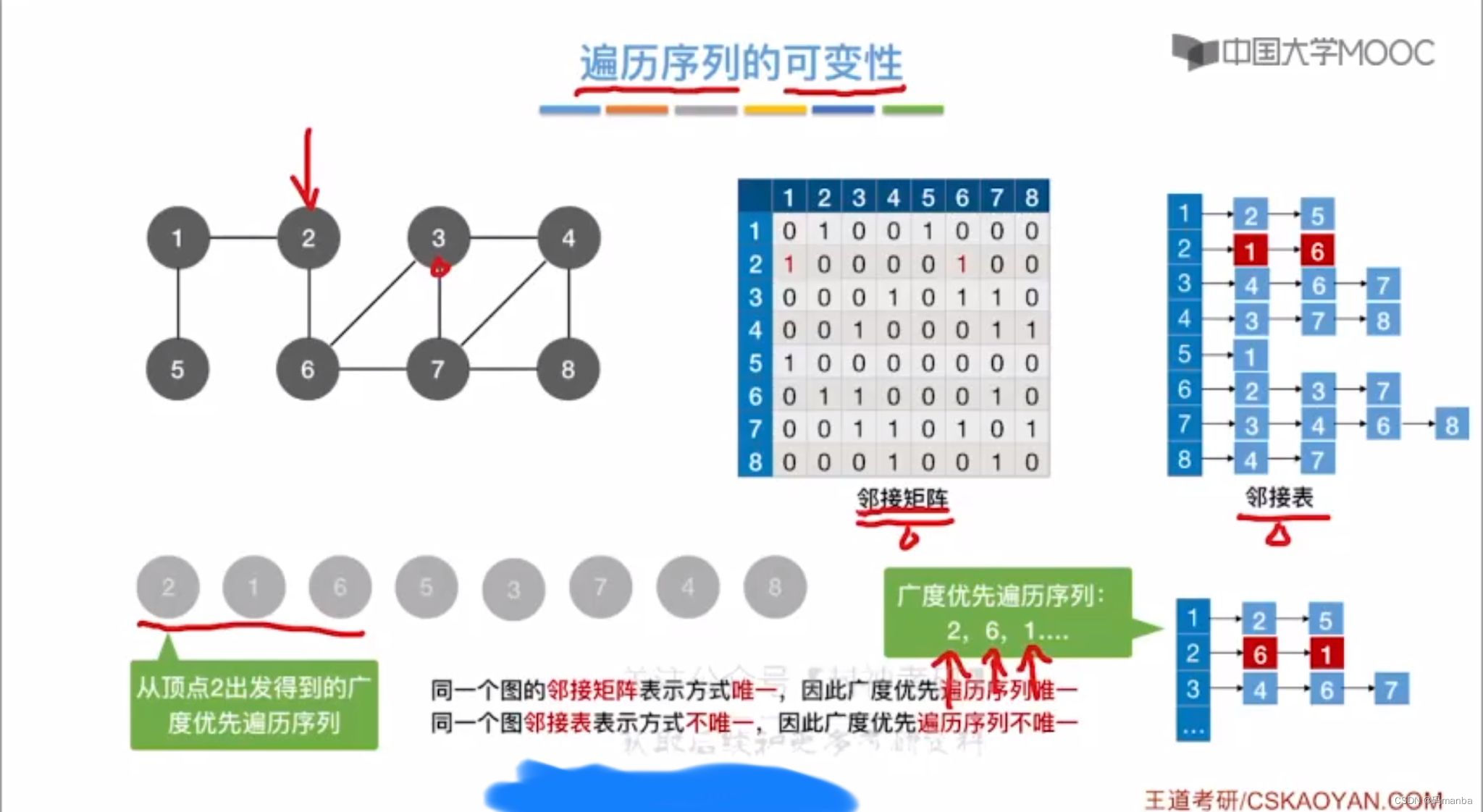
图的存储方式
- 广度优先遍历,,邻接矩阵的存储图遍历是唯一的,但是如果存储方式是邻接表的话,遍历的顺序就不唯一
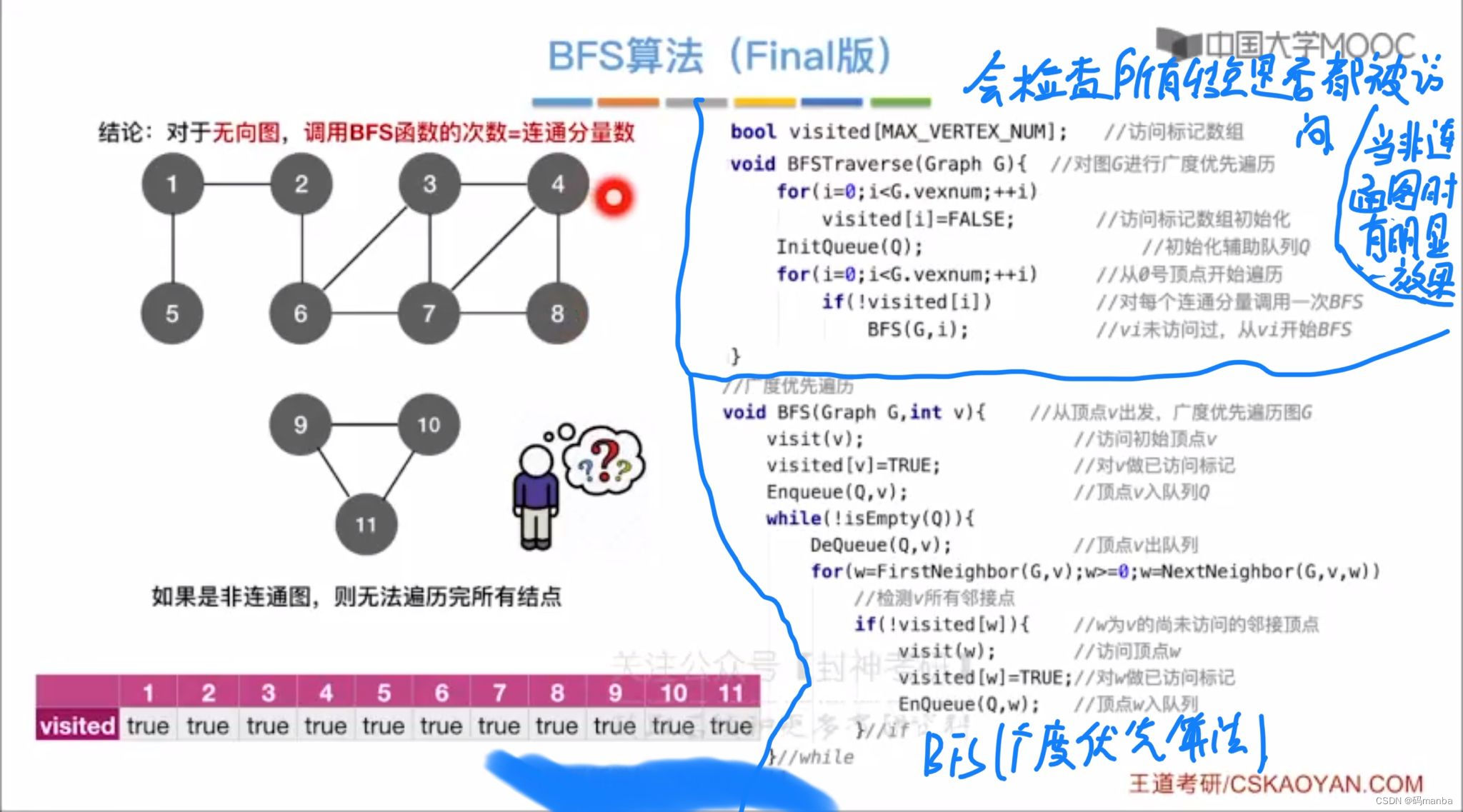
广度优先遍历算法代码
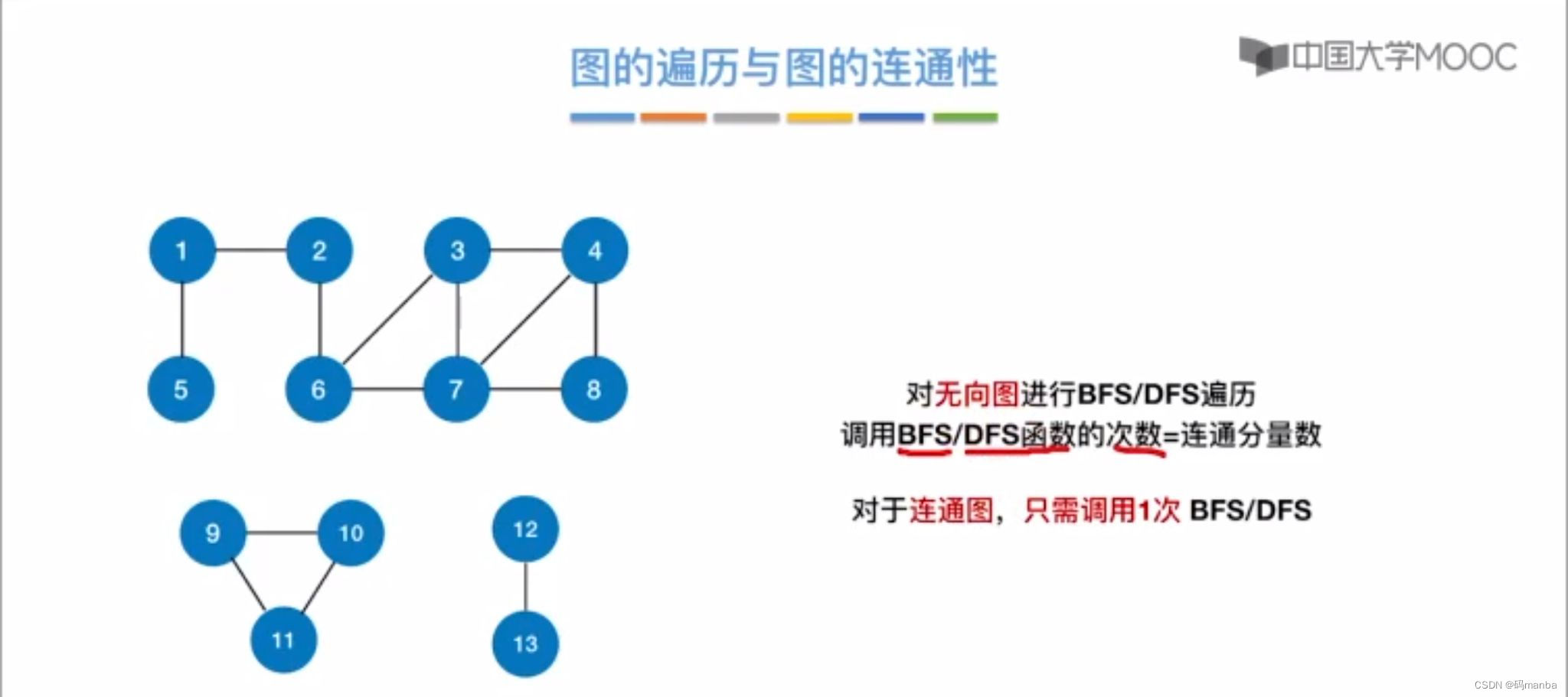
- 对于无向图,调用bfs函数的次数等于连通分量的个数,因为bfs一次会遍历一个连通分量
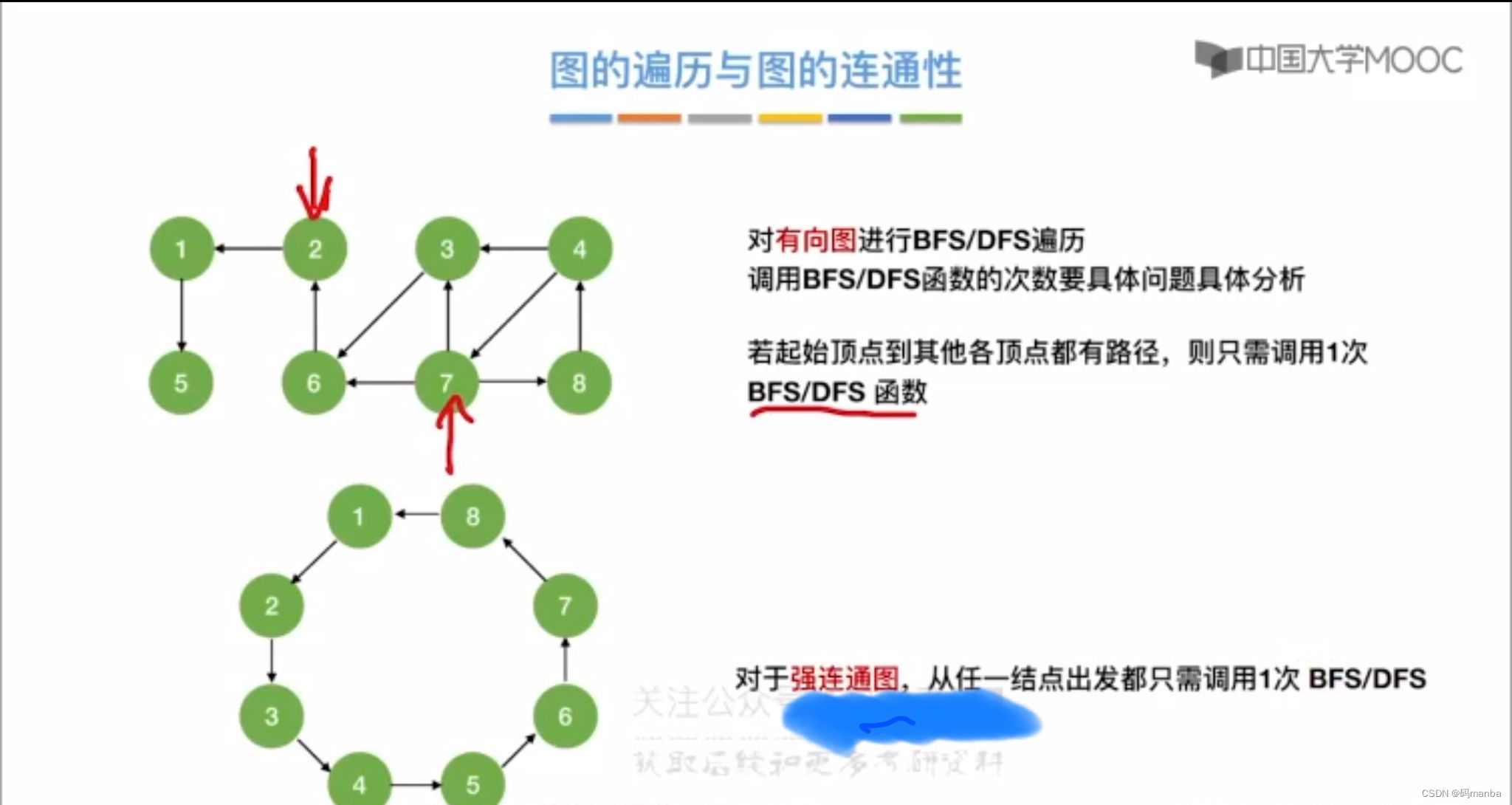
- 注意,当有向图进行广度优先遍历的时候。 从不同的结点出发遍历dfs的次数可能不一样
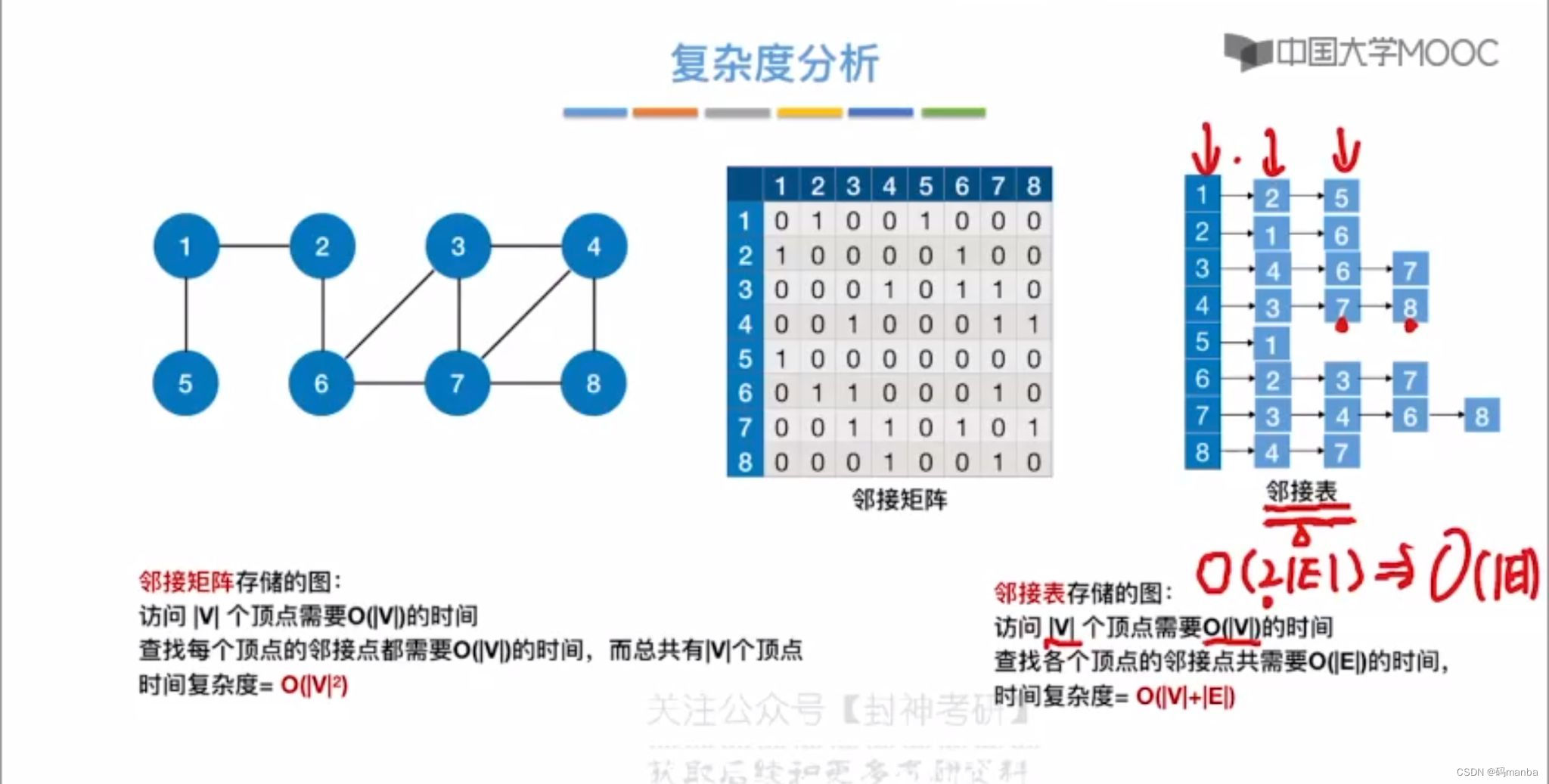
广度优先遍历算法的时间复杂度
- 分析时间复杂度就是找多少顶点,找对应多少边,不要陷入bfs中
广度优先生成树
- (广度优先生成树)对图进行第一次广度优先遍历的时候,每个结点第一次被访问的路径被记录下来,这样一颗连通的图就会产生一颗生成树
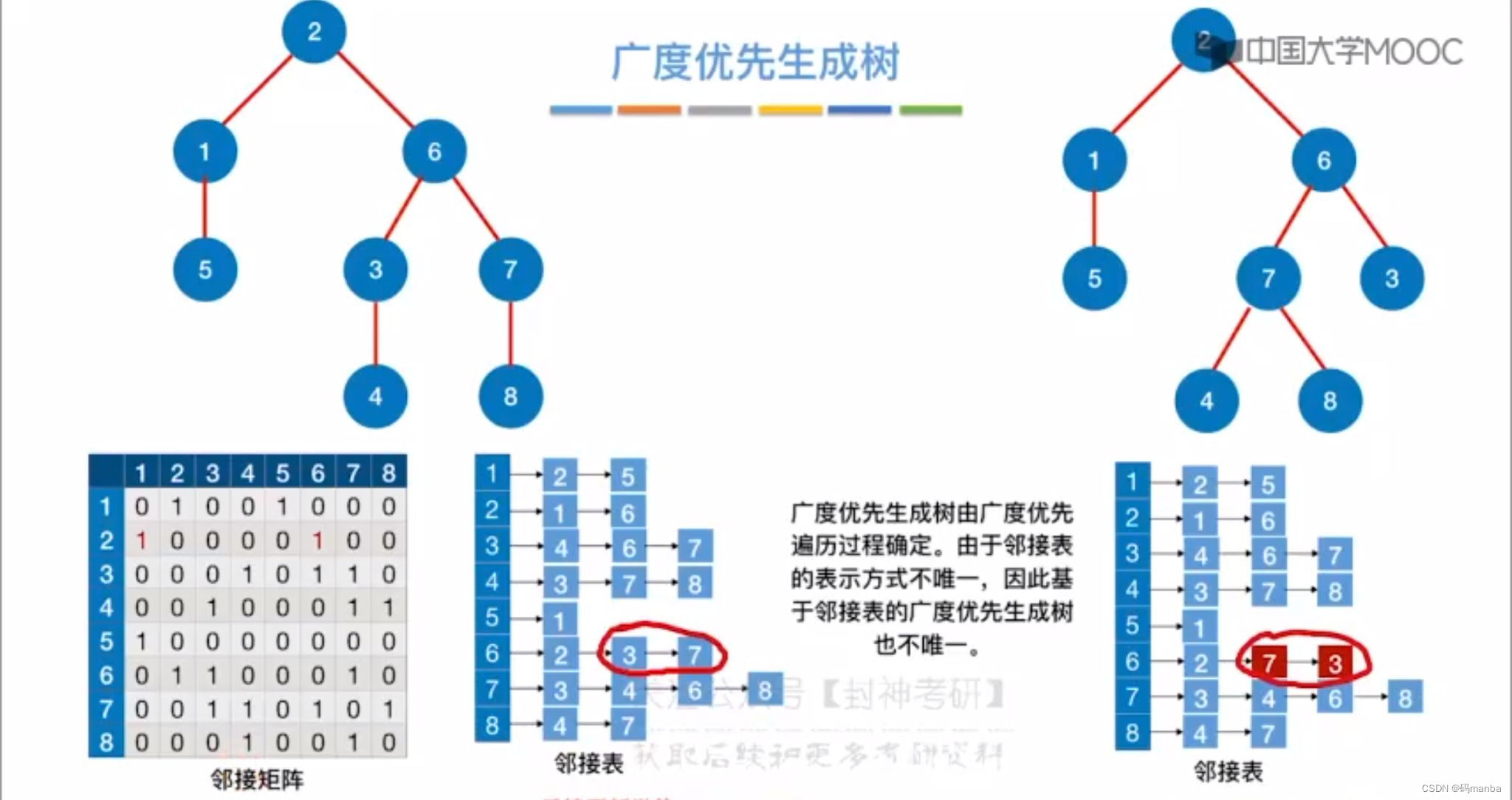
⭐ 当存储结构是邻接表的时候,因为邻接表的存储可能不一,则广度优先遍历可能不一样,所以广度优先生成树的形状也可能不一样
所以对于非连通图,每个连通分量都可以生成一颗广度优先生成树。这个非连通图就可以生成广度优先森林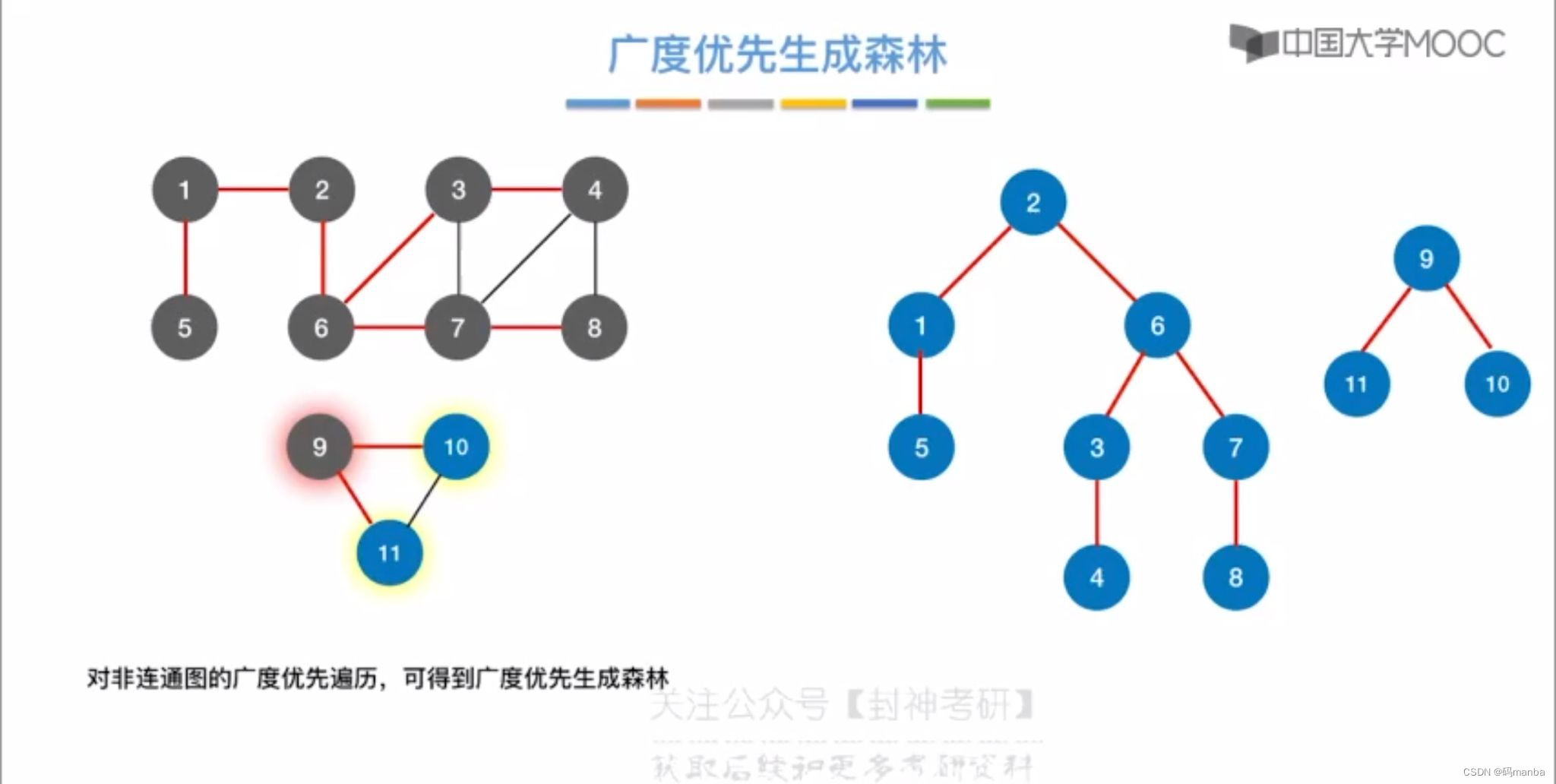
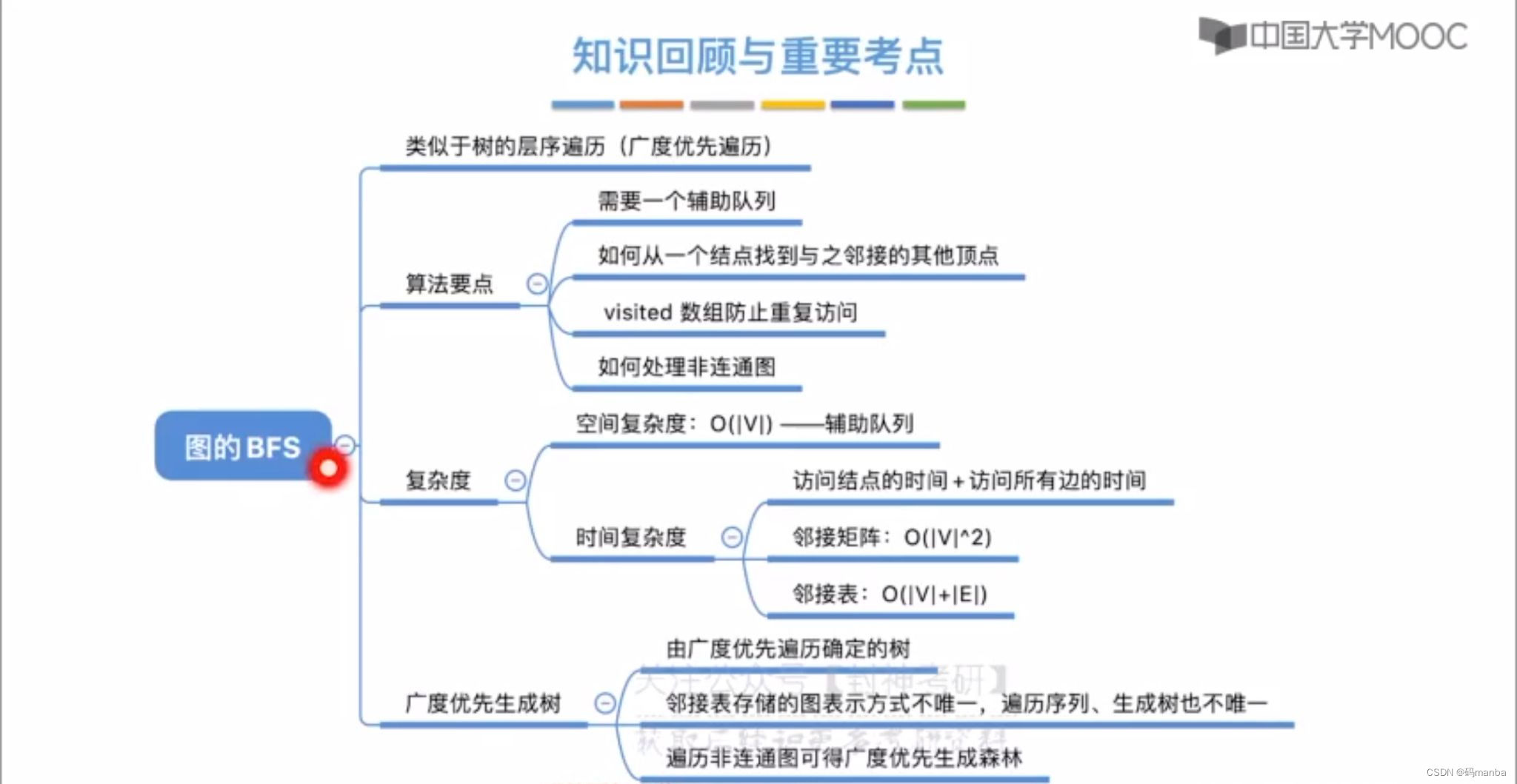
广度优先遍历知识整理
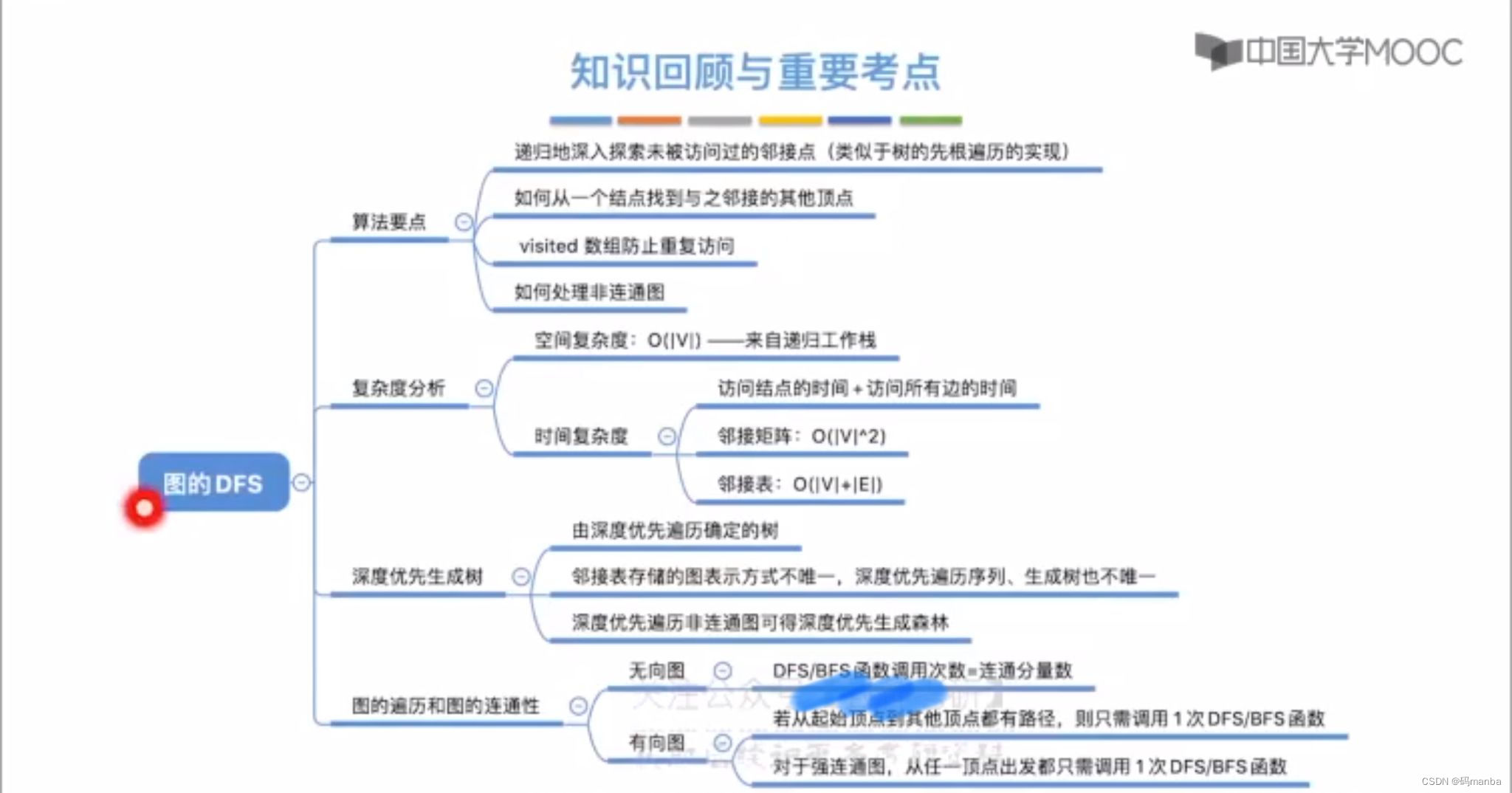
3.2 深度优先遍历
图的深度优先遍历类似于树的先根遍历
深度优先算法代码
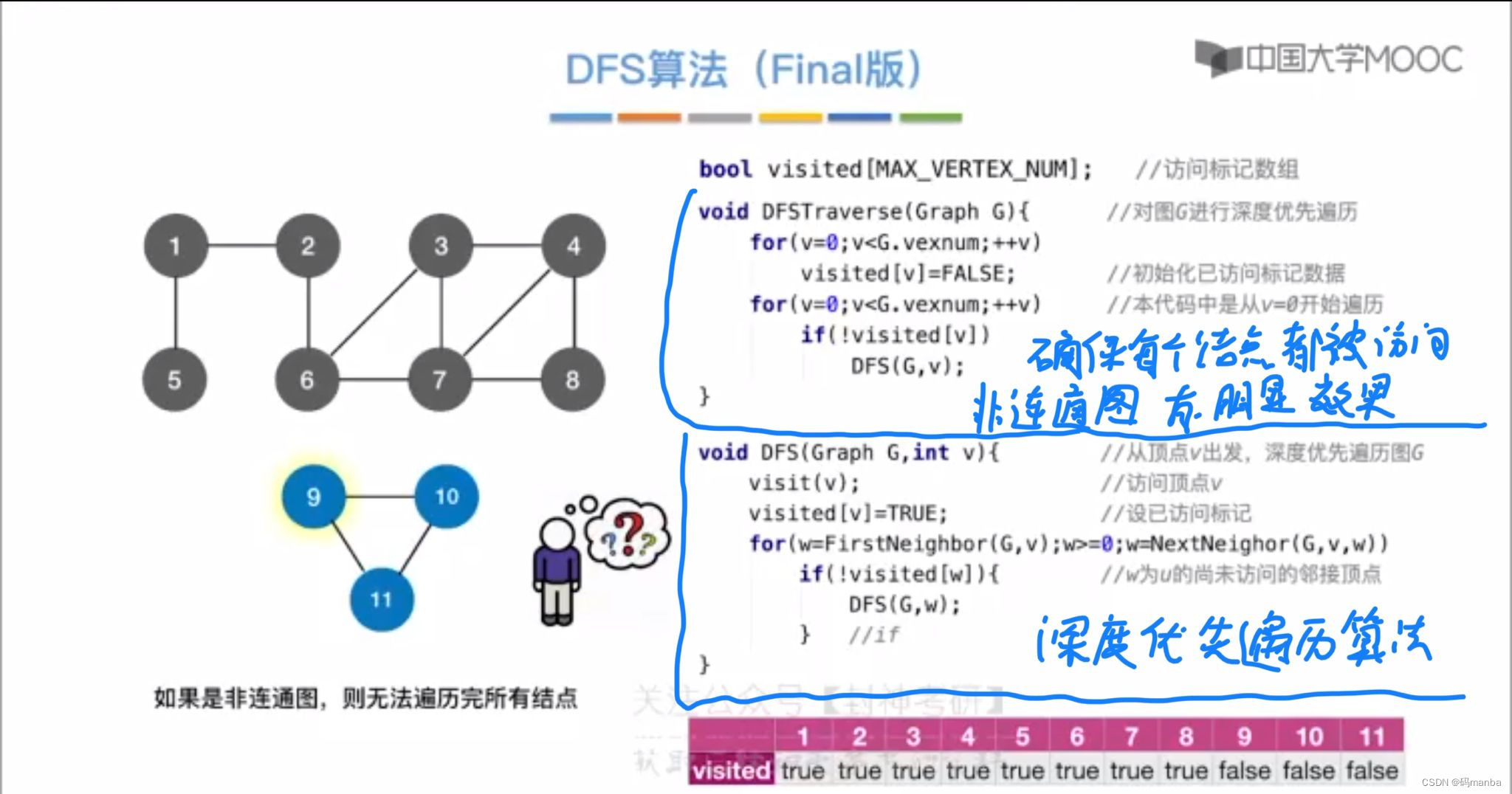
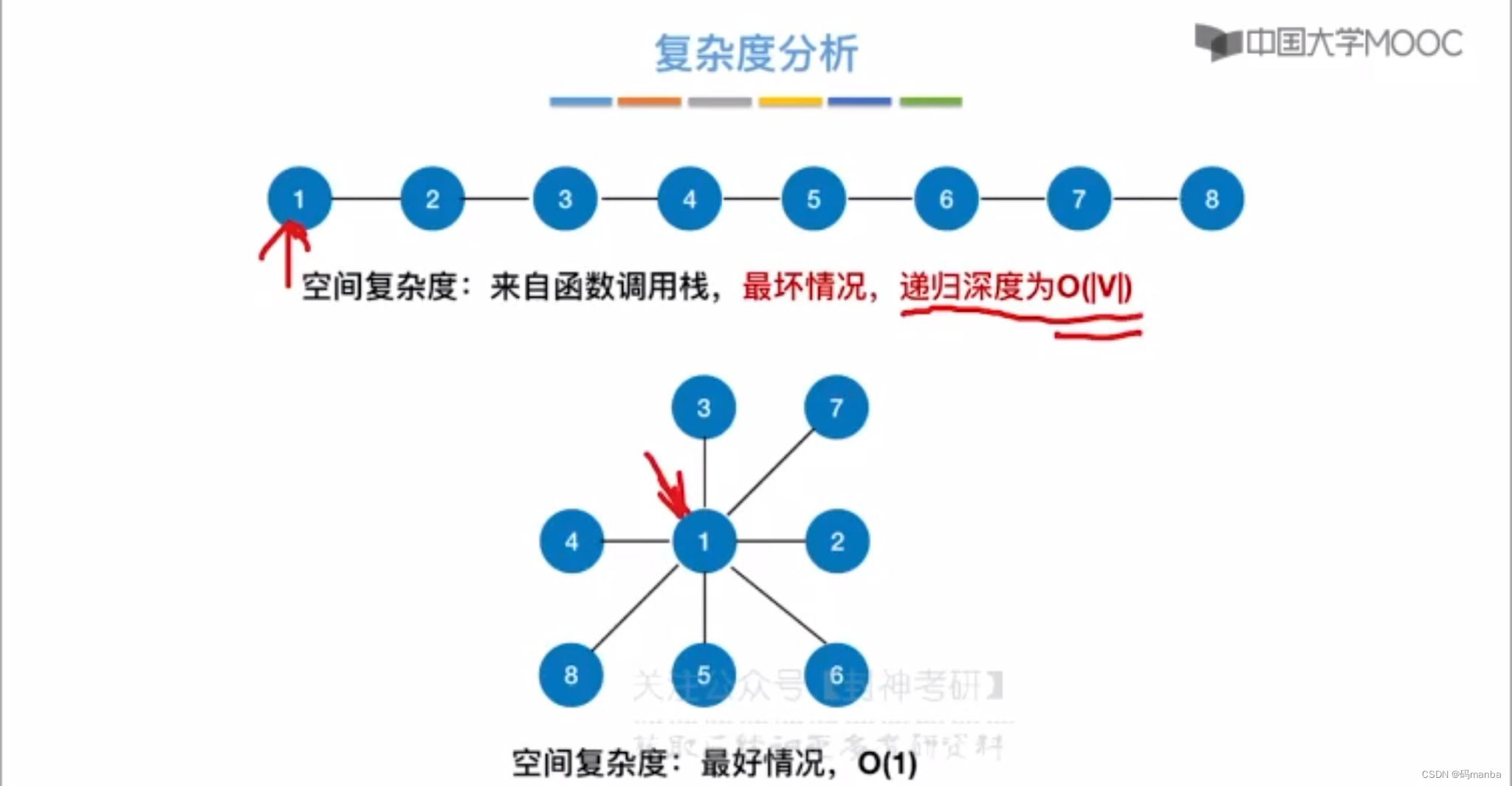
深度优先算法的空间复杂度
⭐ 注意这个空间复杂度关键是递归所占有的空间。而广度优先遍历的算法中空间复杂度是和辅助队列有关
深度优先遍历的时间复杂度
- 与广度优先遍历一样,都是取决于存储方式
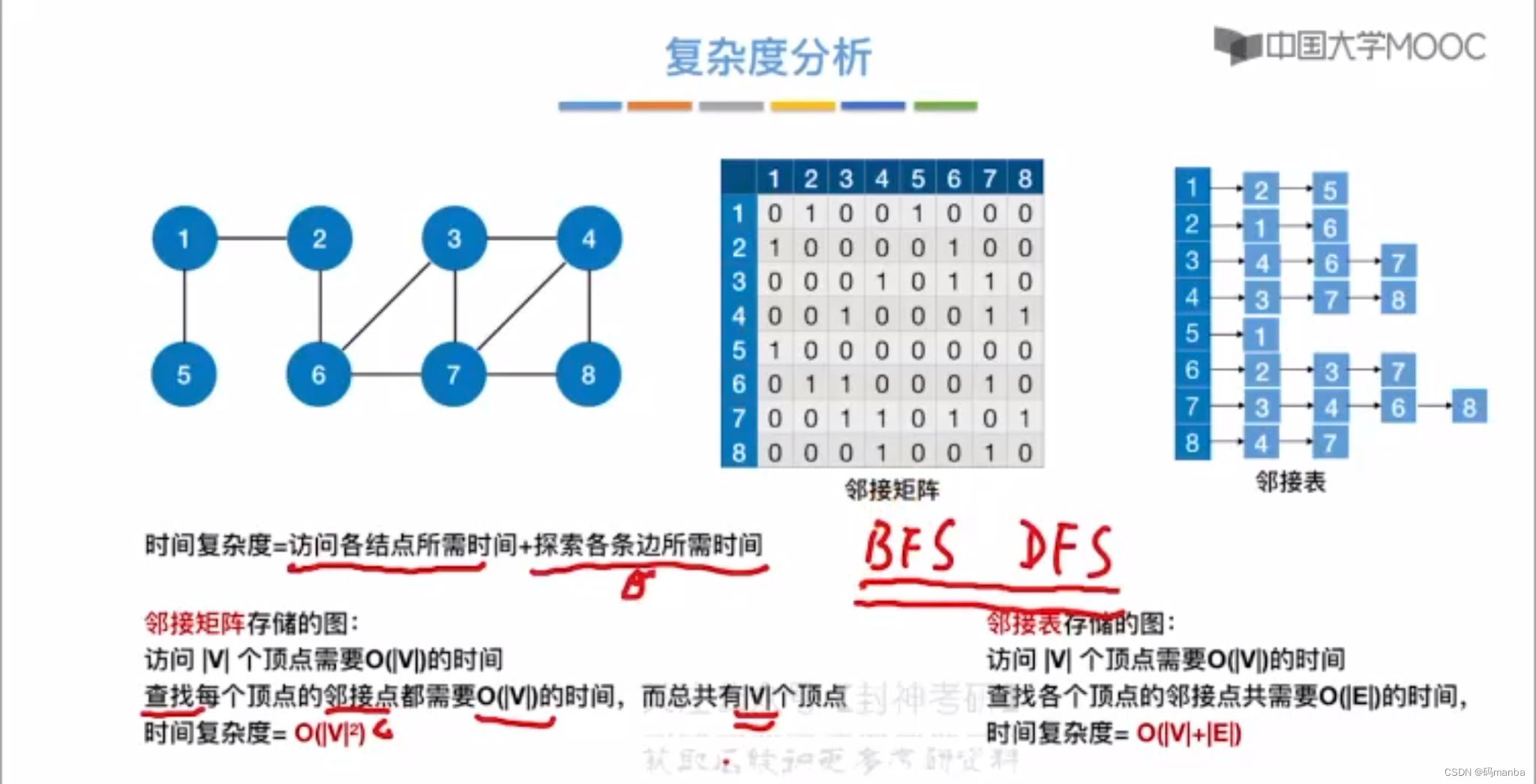
- 同样基于邻接表的存储结构,图的深度优先遍历可能会不同

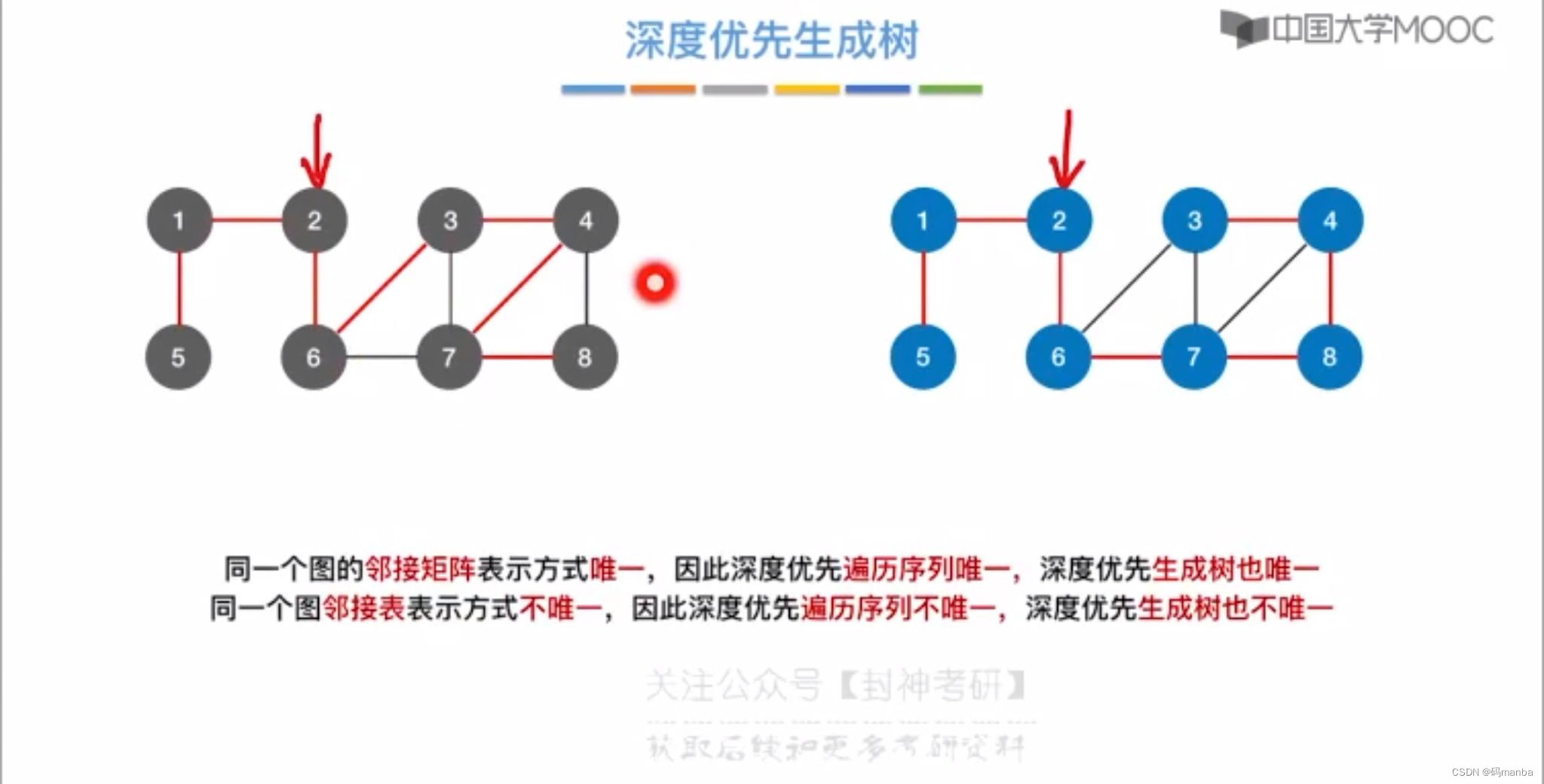
深度优先生成树
- 深度优先生成树,就是图进行深度优先遍历的时候,每个结点最先被访问的路径
- 同样对于非连通图,也就有了深度优先生成森林
- 其实不管是深度优先和广度优先,都是对每个结点探索有没有连接路径的过程。广度是先探索一个结点所有的连接点,而深度则是从一个结点开始,依次往下遍历的过程
3.3 图的遍历与图的连通性关系
- 无向图
- 连通分量决定了dfs或者bfs的调用次数(对于无向图而言
)
- 有向图
- 有向图连通性,与遍历的关系
知识框架
四、 图的应用
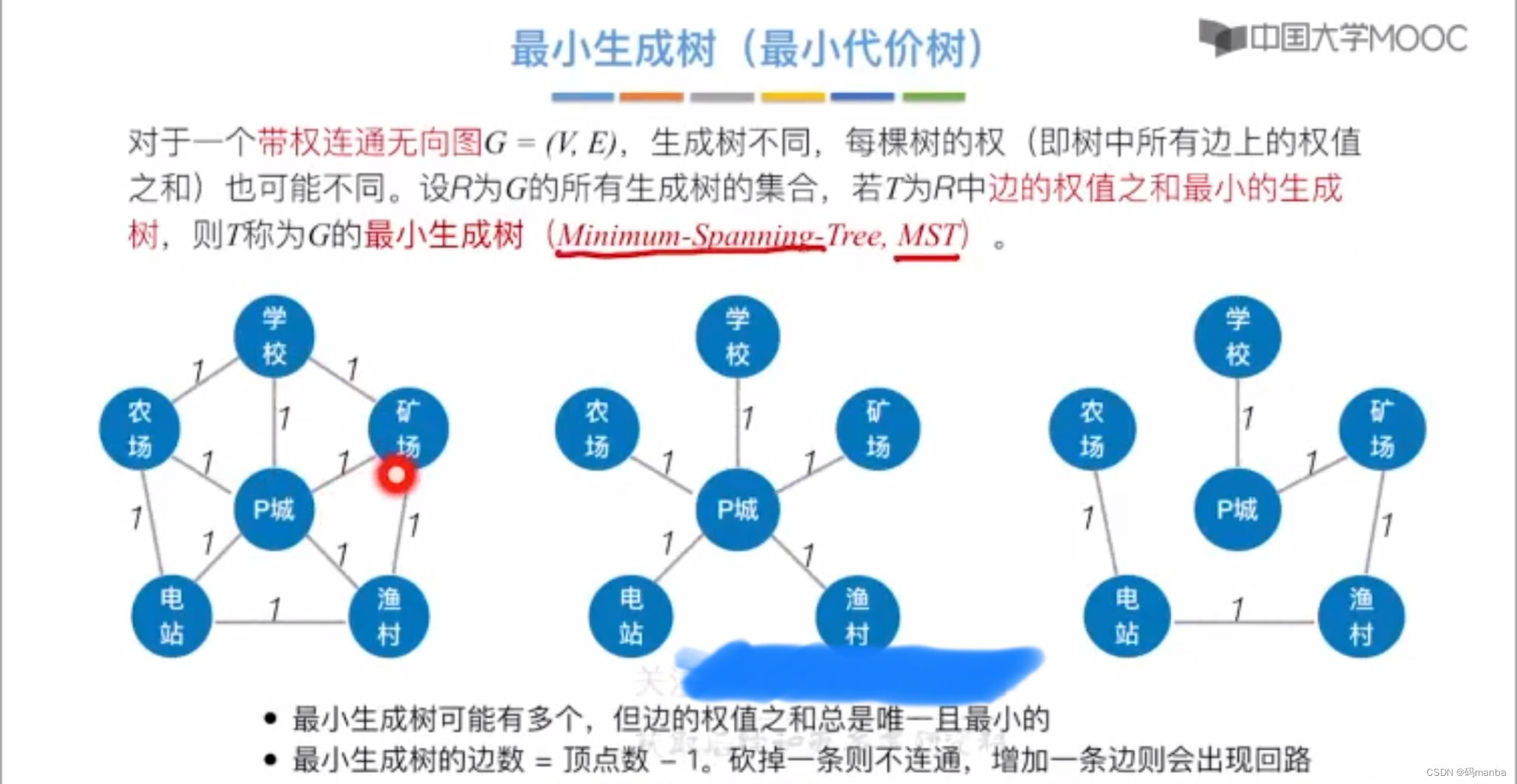
4.1 最小生成树
生成树是图的极小连通子图(区别连通分量是极大连通子图)
最小生成树也叫最小最小代价树
因为一个图可能会有多个生成树,找到一个各边权值和最小的一个生成树就是最小生成树⭐ 最小生成树研究的带权的连通的无向图,因为非连通的图生成森林
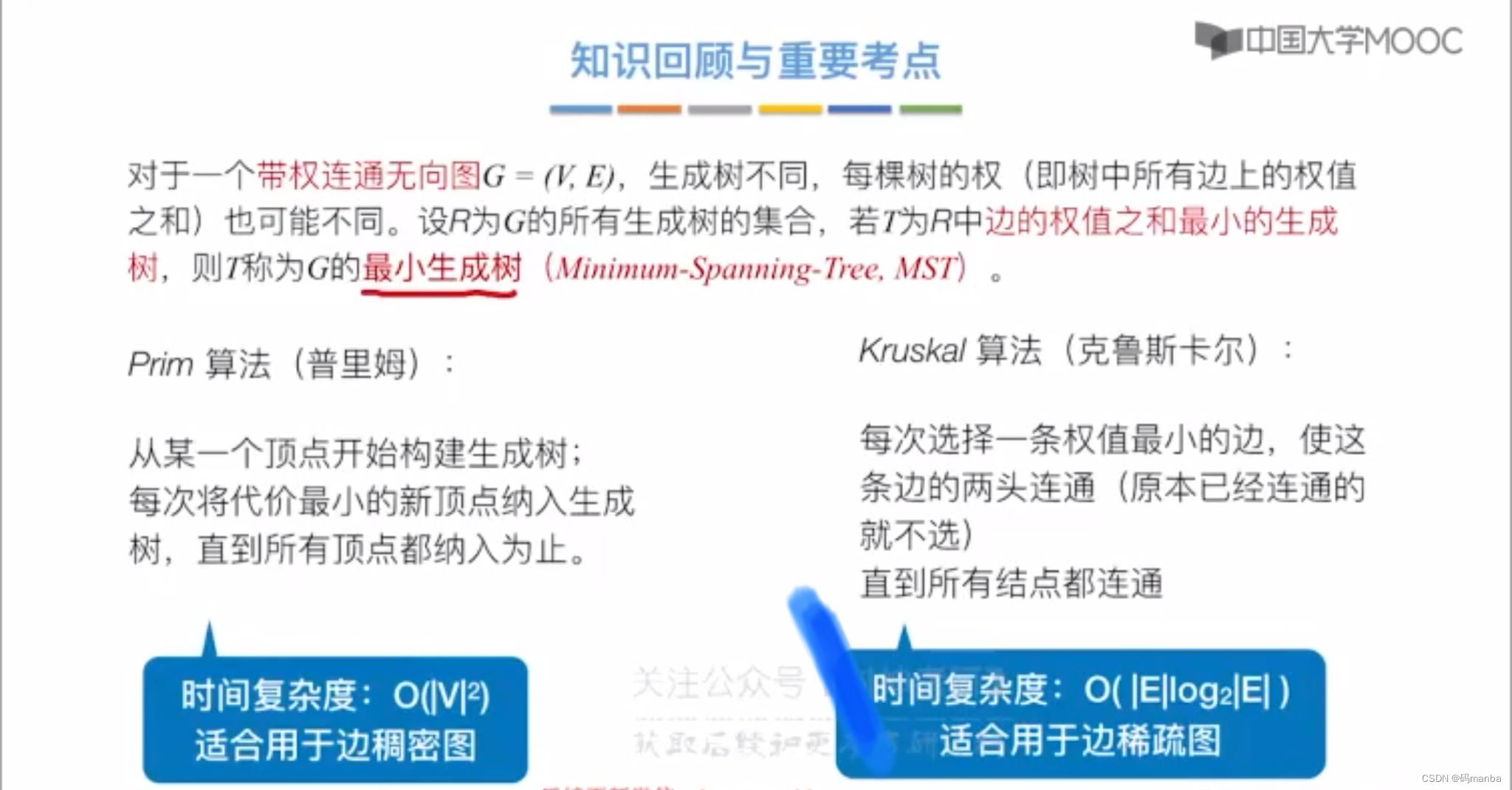
1. 生成最小生成树的两大算法(普利姆、克鲁斯卡尔)

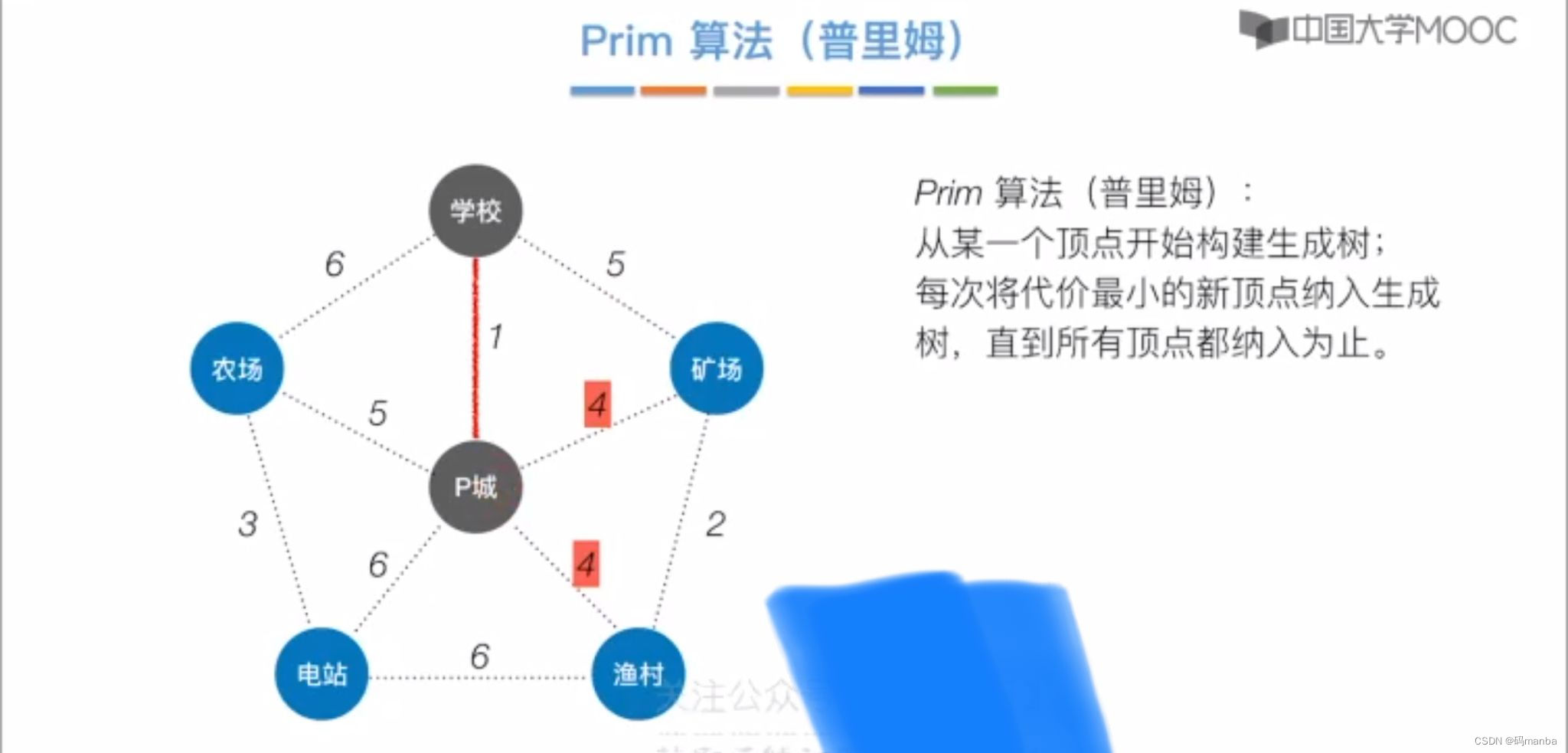
一普里姆(prim)算法
普里姆算法
- 在现有选中结点选择一个权值最小的路径所通向的未选择的结点。
- 依次将所有结点都选中
- 就是一颗最小生成树
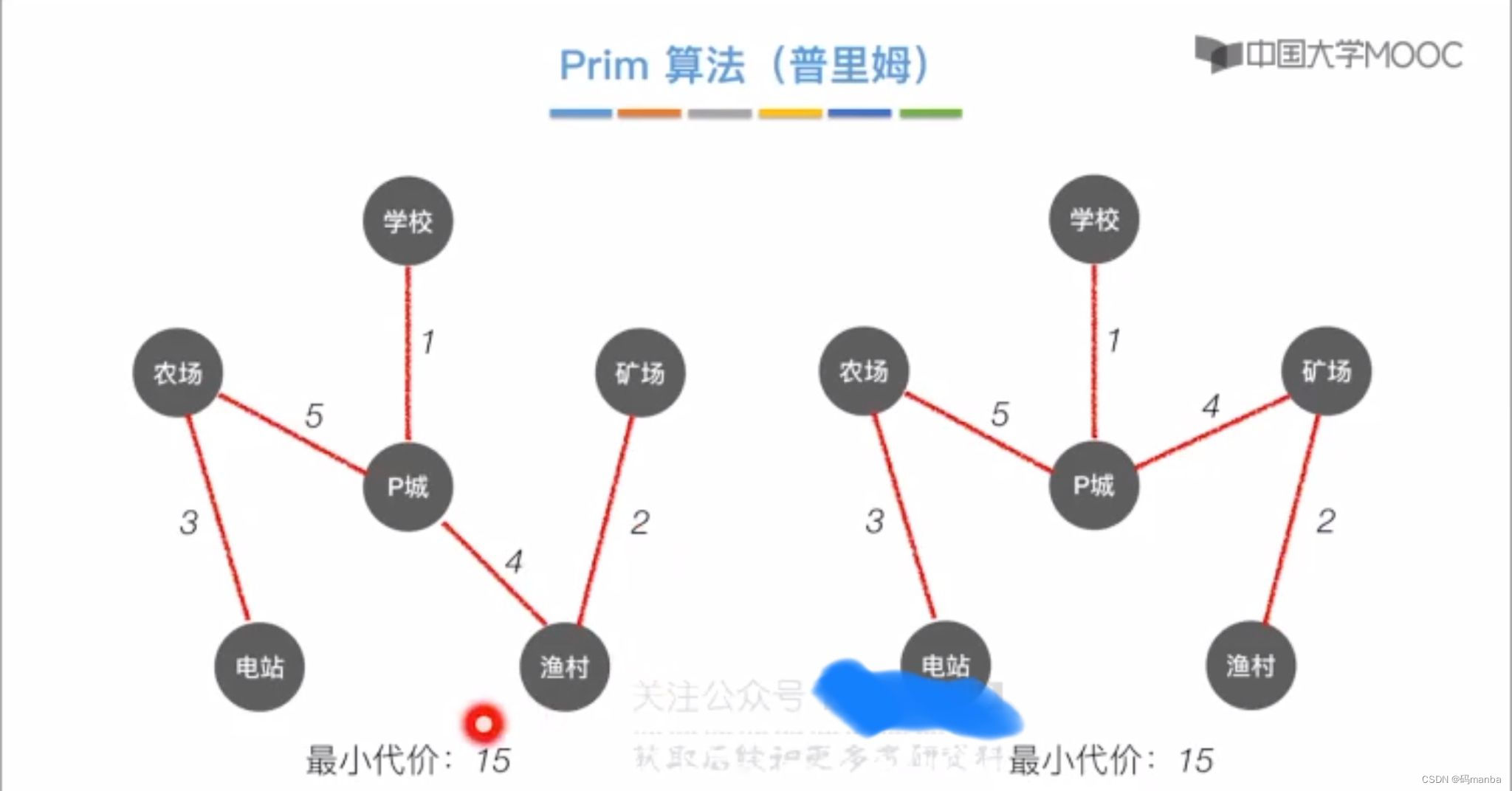
例:
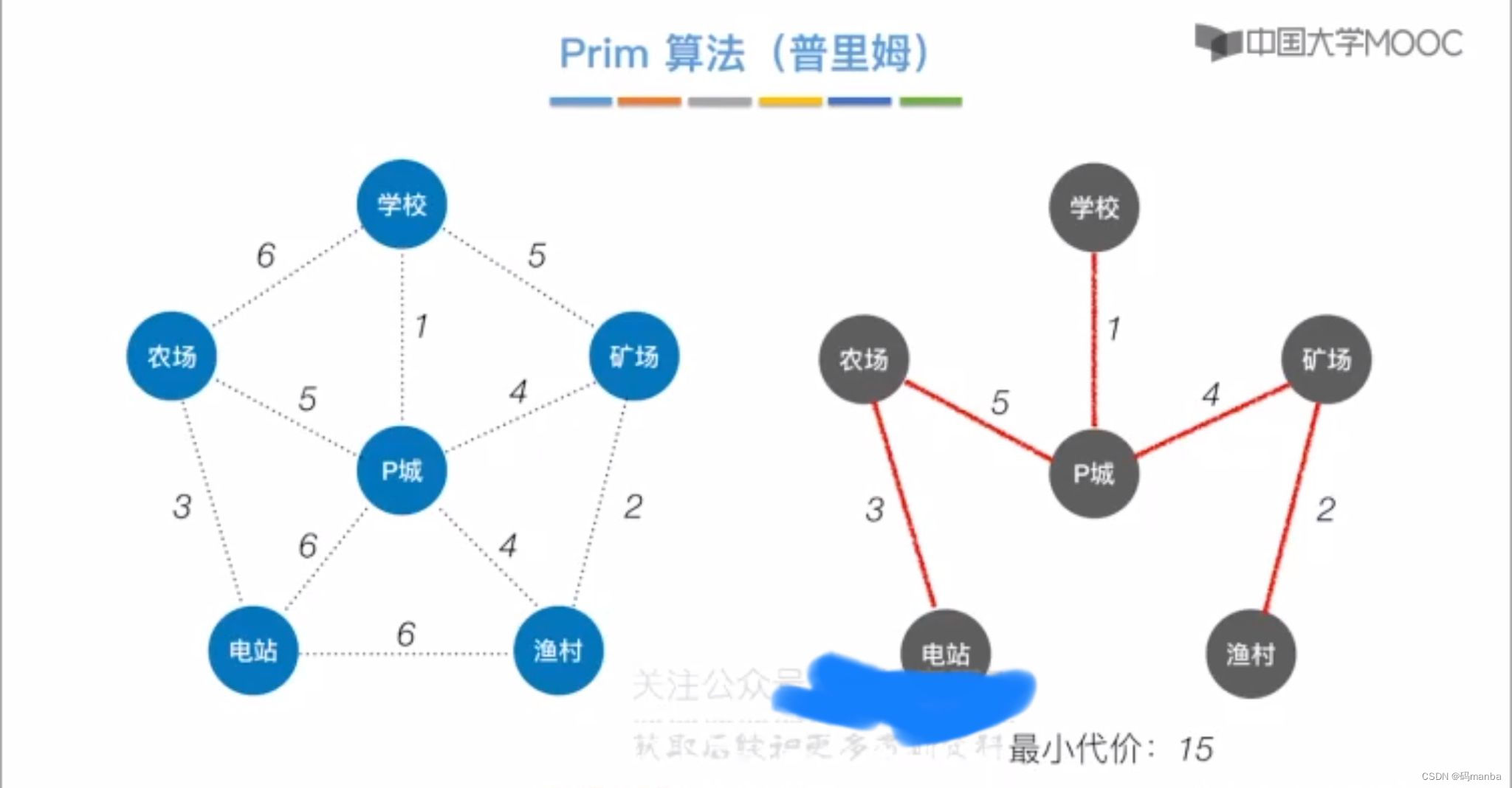
同一个图的最小生成树可能不唯一,但是权值相等。发生不唯一的可能性就是在算法进行时出现了权值相等的情况
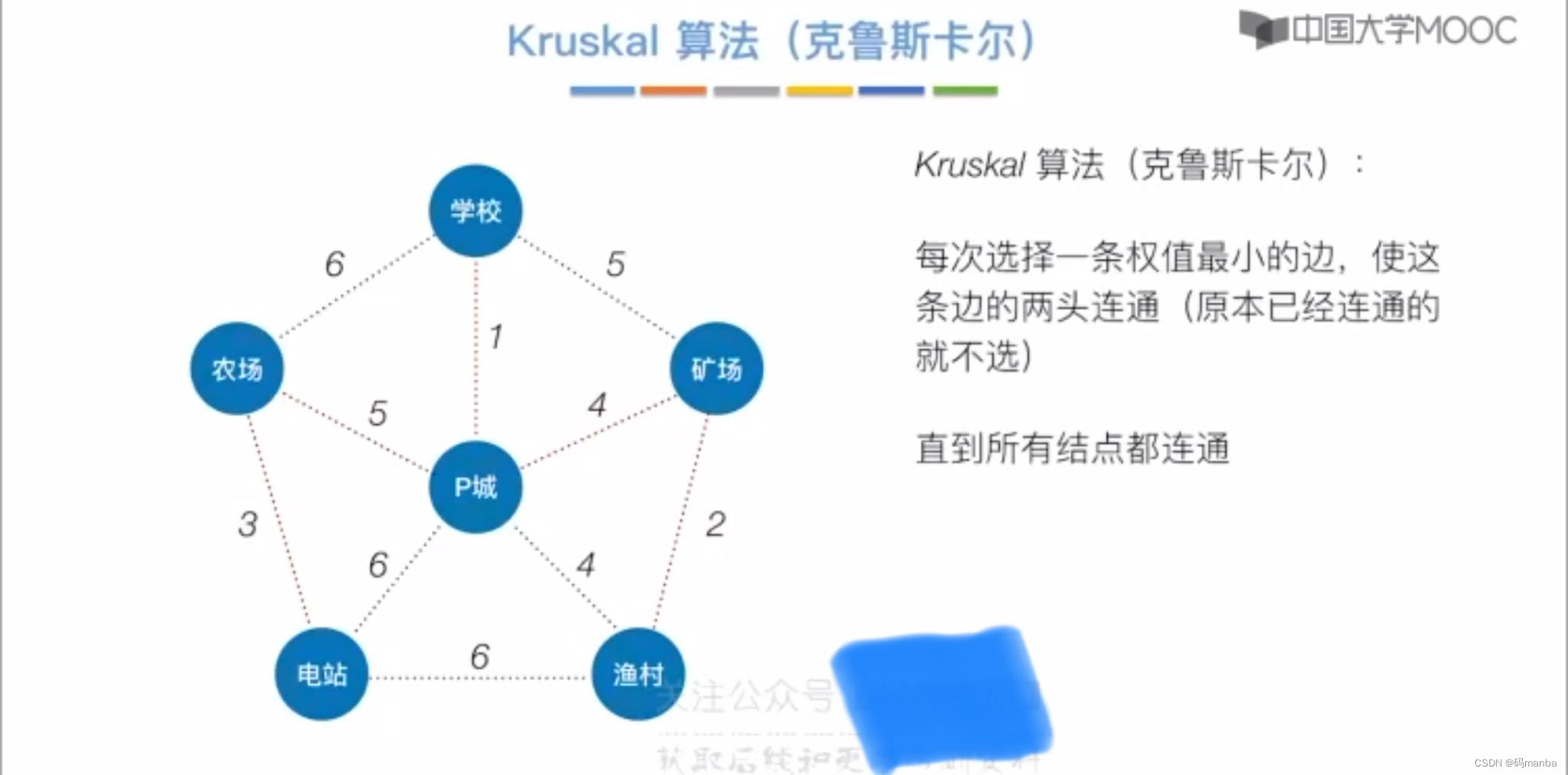
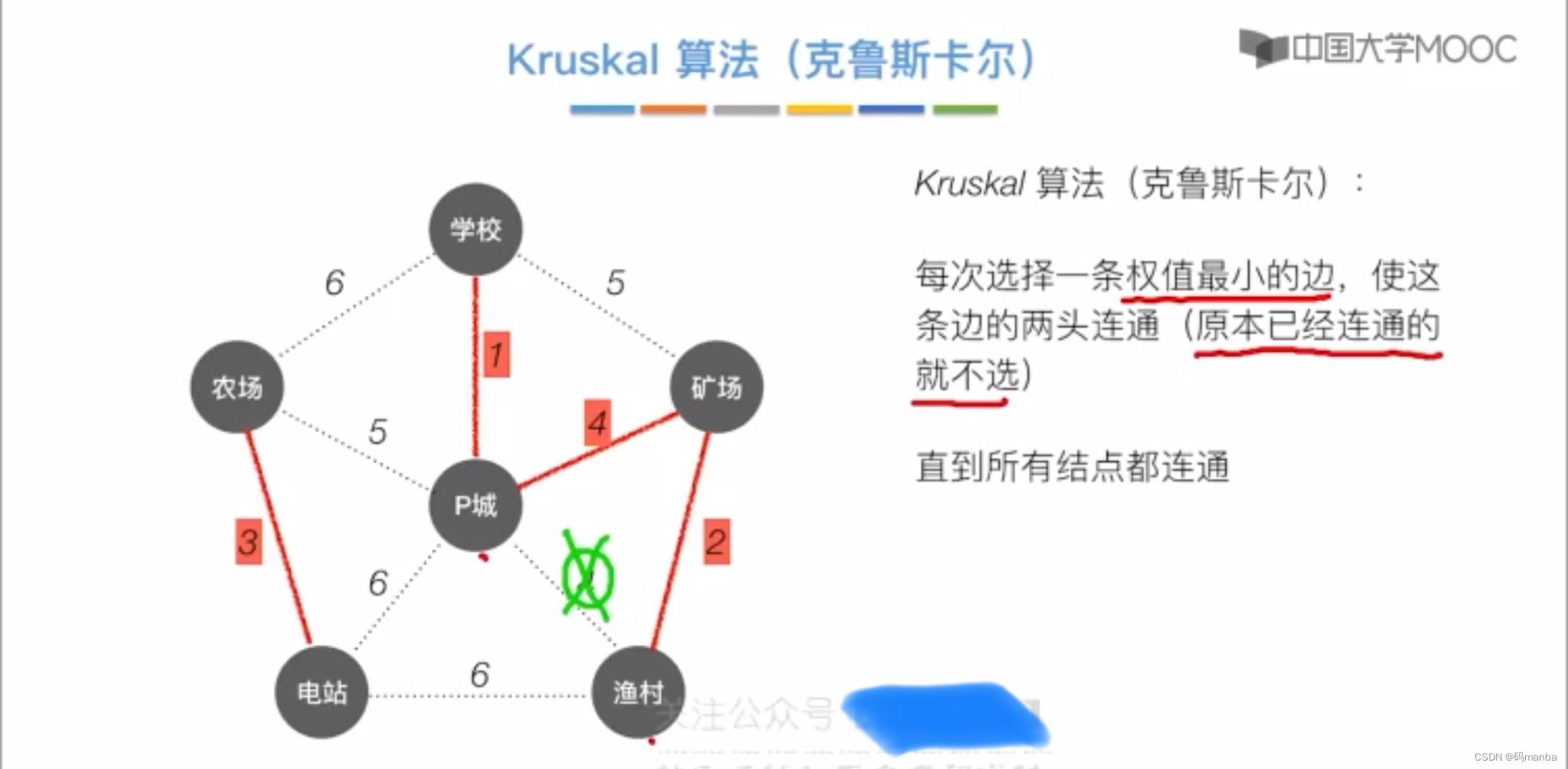
二 克鲁斯卡尔算法(kruskal)
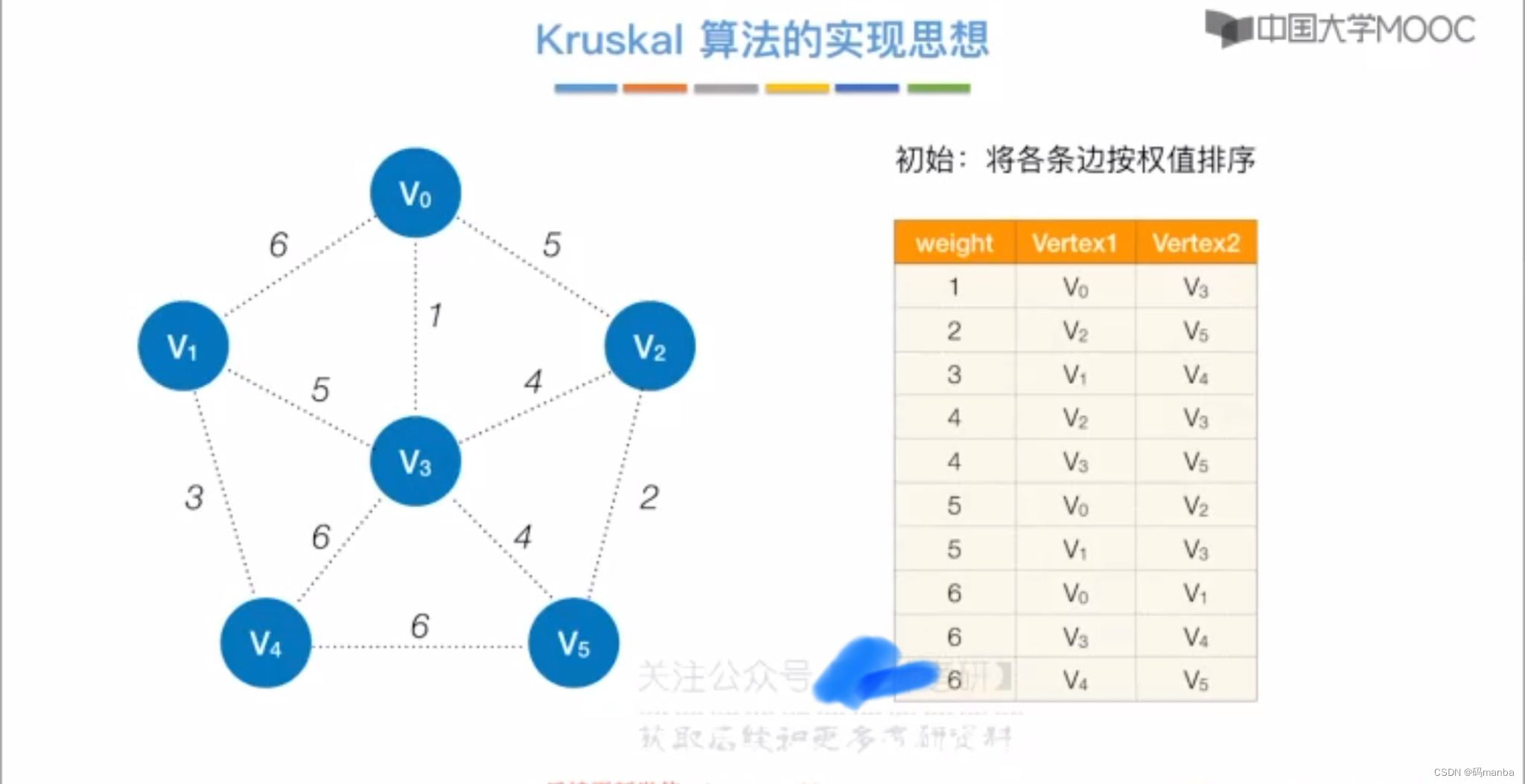
克鲁斯卡尔
- 每次选择权值最小的边,如果两个结点已经连通就不选,在选择其他边即可
2. 两个算法的时间复杂度对比
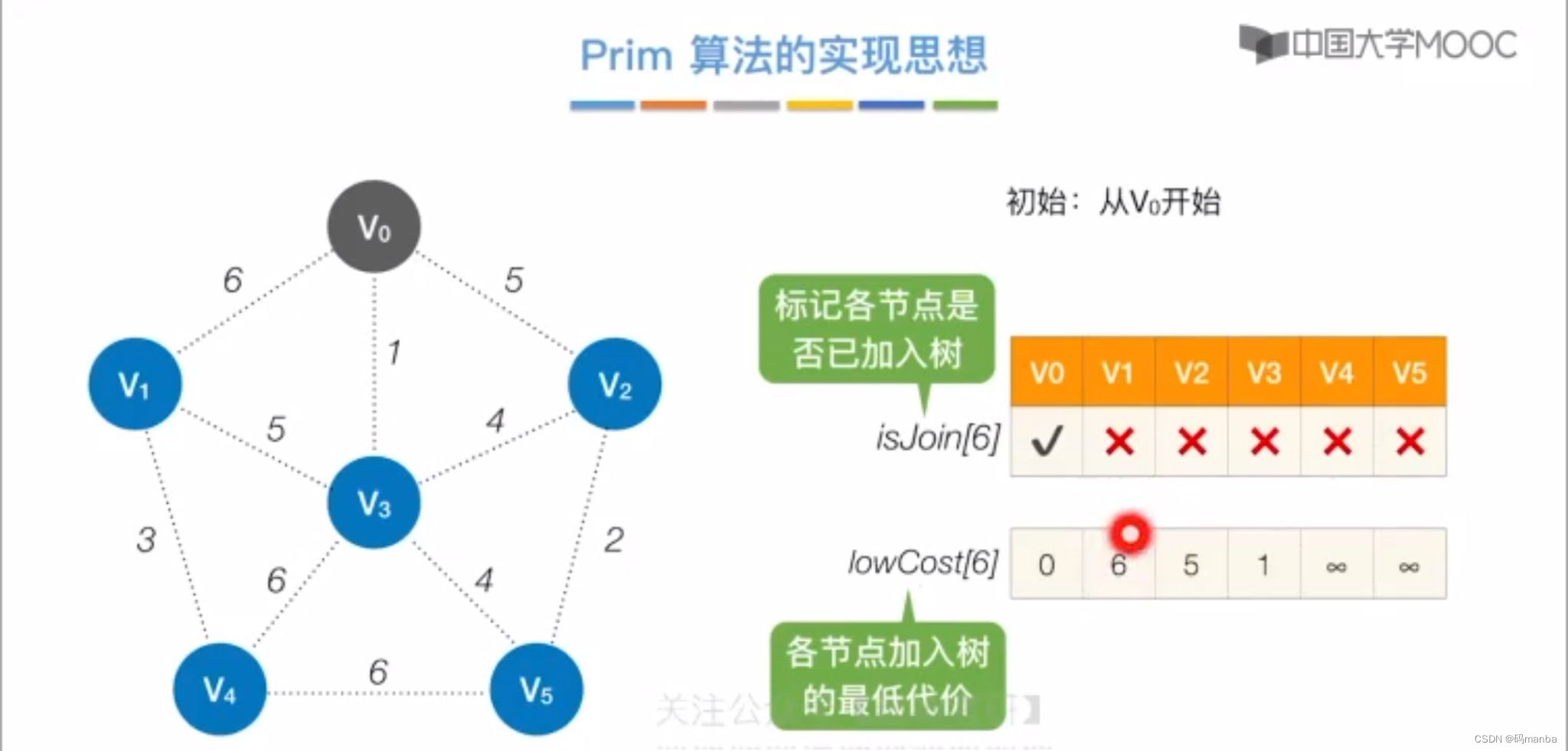
prim普里姆算法的实现思想如下
初始化
第一轮
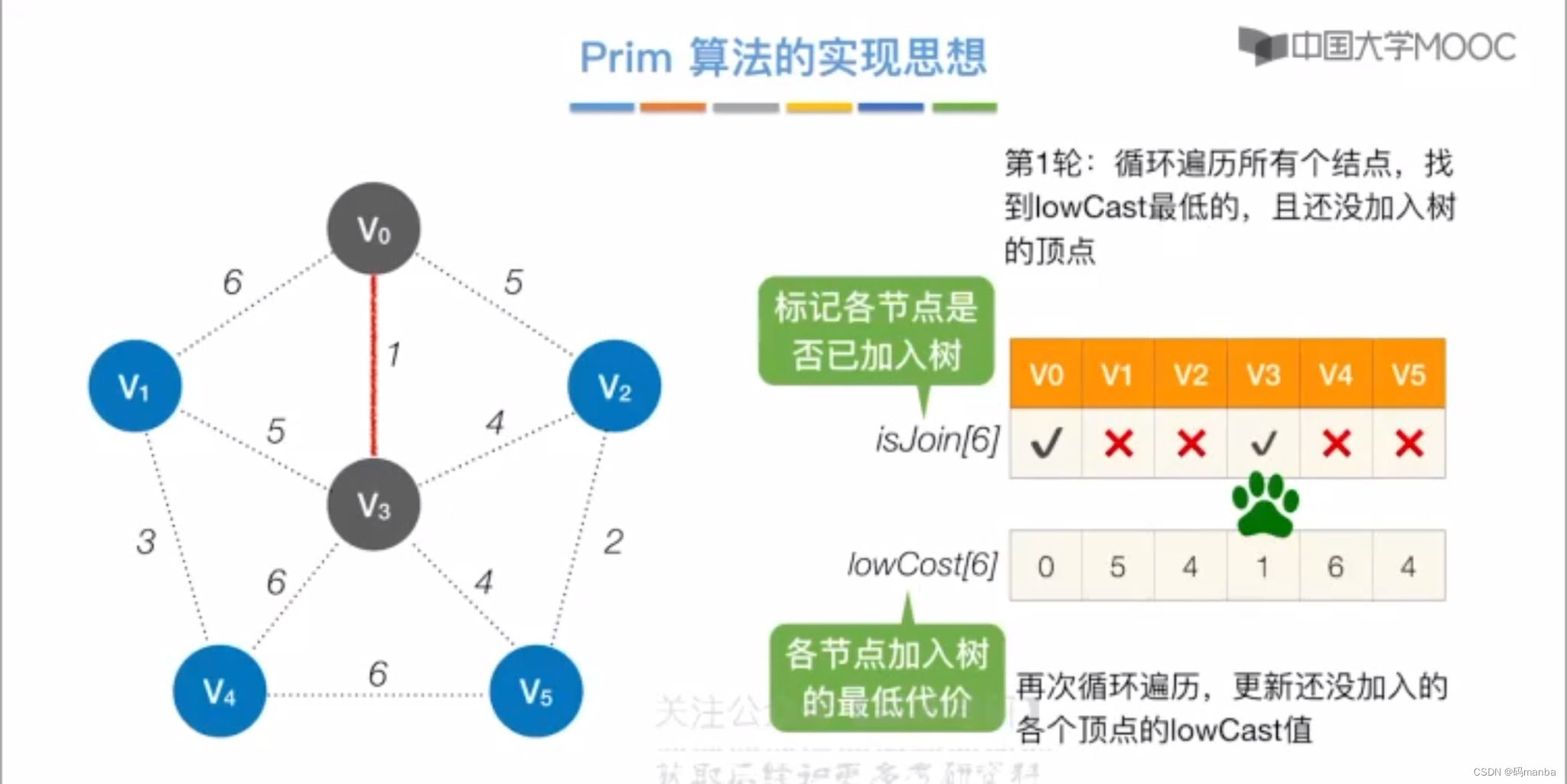
- 循环遍历找个最小权值,加入标记
- 加入后,与剩余未加入的结点间路径的权值可能会改变,所以要循环更新一下权值数组
(注意是其余结点和新加入结点直接有没有边,如果存在边且权值更小,则应该更新权值)
克鲁斯卡尔算法实现思想
首先我们需要一个按权值排好序的数组
第一轮
- 我们要检查两个点之间是否连通
- 并查集操作,边的两个结点不连通,就连起来
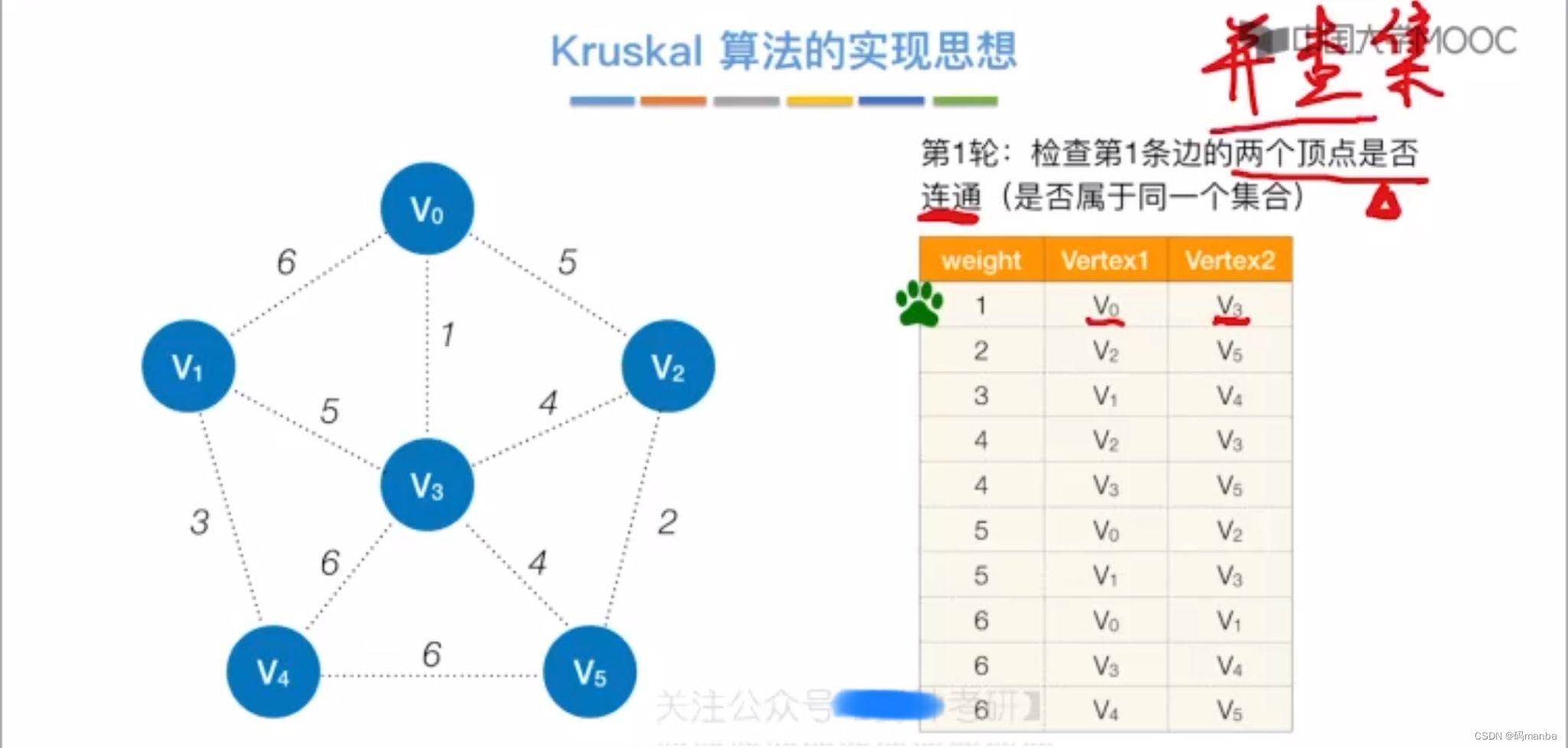
连通就跳过

3. 最小生成树的 知识回顾
4.2 最短路径

1. 通过BFS 广度优先算法 求 最短路径 (适用于无权图) (单源最短路径)
广度优先算法的代码

⭐ 无权图的 广度优先算法
- 无权图,我们这里默认每个路径的 权值为 1
- 通过此算法,我们求得 d[] 与 path[]

其中d[] : 是 传入结点到其他结点的 长度(权值)。
path[] : 记录每个结点是由哪个结点指向的,可以逆次的依次找到 最短路径。
⭐ 因为我们是通过 BFS 求的 最短路径, 所以进行广度优先算法的时候生成的 广度优先生成树的深度一定是最小的
- 带权路径长度: 带权图的一条路径上的权值和;

2. 迪杰斯特拉算法(单源最短路径)
迪杰斯特拉

算法思想
final[]: 标记 各顶点 是否 已经 找到了 最短路径;
dist[]: 顶点最短路径的长度为多少;
path[]: 当前顶点 的前驱结点;- 第一轮
- 遍历所有结点, 找到未确定最短路径的,将其设置final[i] = true;
- 因为这时候确定了一个新的最短路径的结点,检查 dist 有没有通过该结点,路径更短的情况,进而更新dist,path 数组。

接下来的每轮,都依次执行,直到不存在没有最短路径的结点, 也就是 final[]数组中不存在 false;
- 找最短的dist对应的final设置为true; (也就是 新有一个结点确定了最短路径)
- 更新 dist[]数组 和 path[] 数组。

算法实现

迪杰斯特拉不适合带负权值的图
负权图的应用
例如,吃鸡的时候,跑毒,直接进毒圈可能中途掉了7滴血。但是如果跑进去的过程中绕路吃了一个血包,就要掉10滴血,但是血包回5滴血。 这时候就要用负权图。
2. 弗洛伊德算法(求每点间的最短路径)
弗洛伊德

动态规划的思想

弗洛伊德算法 思想
A矩阵,是 一个二维数组,通过行列下标表示两个结点,其对应的值为两结点间的最短路径长度。
path矩阵, 用于存储两个结点直接权值最小的中转路径,动态更新。取值为 -1表示两个结点直接没有中转点,如果为其他整数表示中转点的标志。- 第一步
- 先让 v0可中转,检查,各结点间是否通过v0的权值更小(如果有更改A矩阵,更改path矩阵)

- 第二部
- 再假如一个中转点,判断其他结点经过该结点有没有更短路径;从而完成对A矩阵和Path矩阵的更新。

- 经过n-1步的递推;

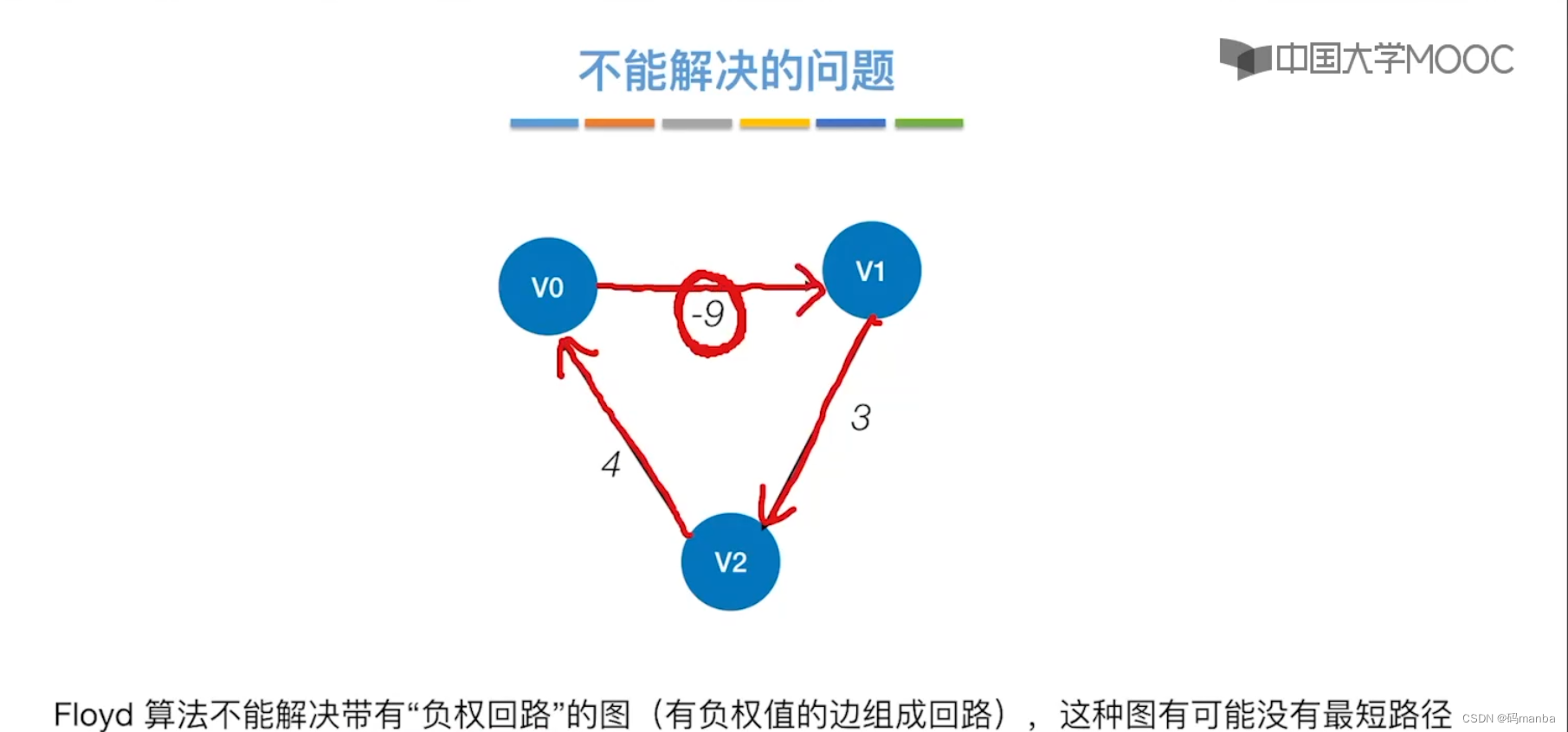
弗洛伊德算法可以解决 带负权图, 但 解决不了带有负权回路的图
- 带负权的图

- 带负权回路的图
4. 三种算法的总结

4.3 有向无环图 DAG

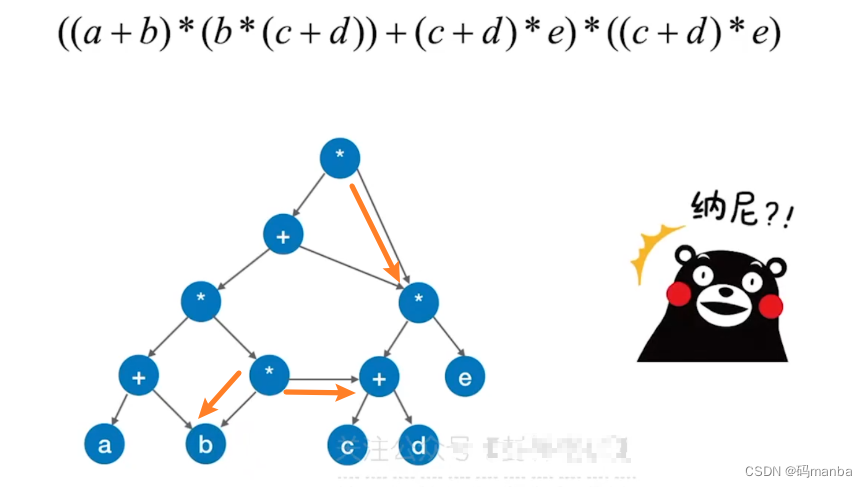
DAG 描述 表达式

⭐ 通过有向无环图化简存储- 就是把相同的子树通过两个路径指向,从而减少存储空间。
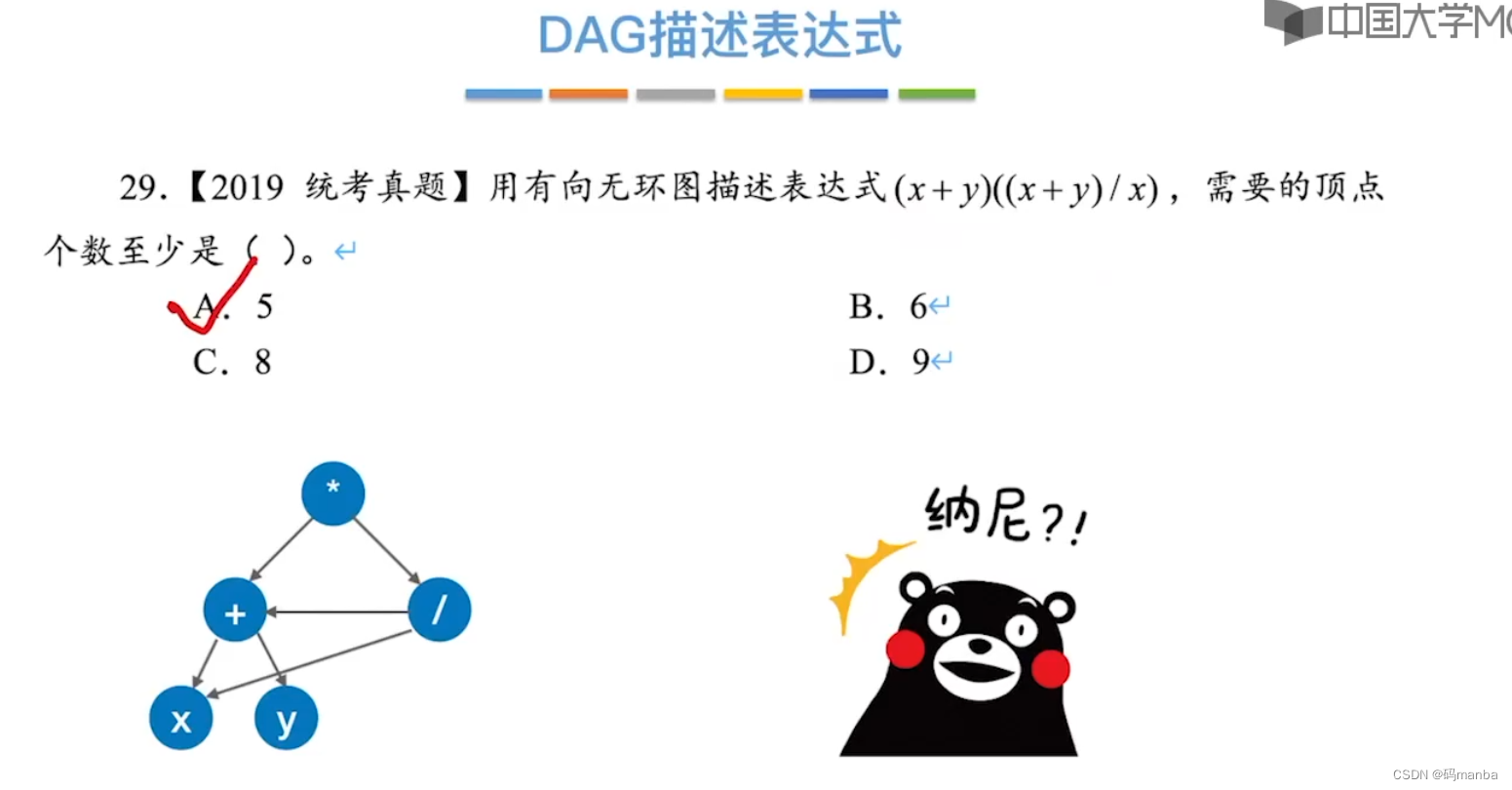
⭐(例题)DAG 表达式☞ 通过有向无环图优化 存储结点个数。
- 问:
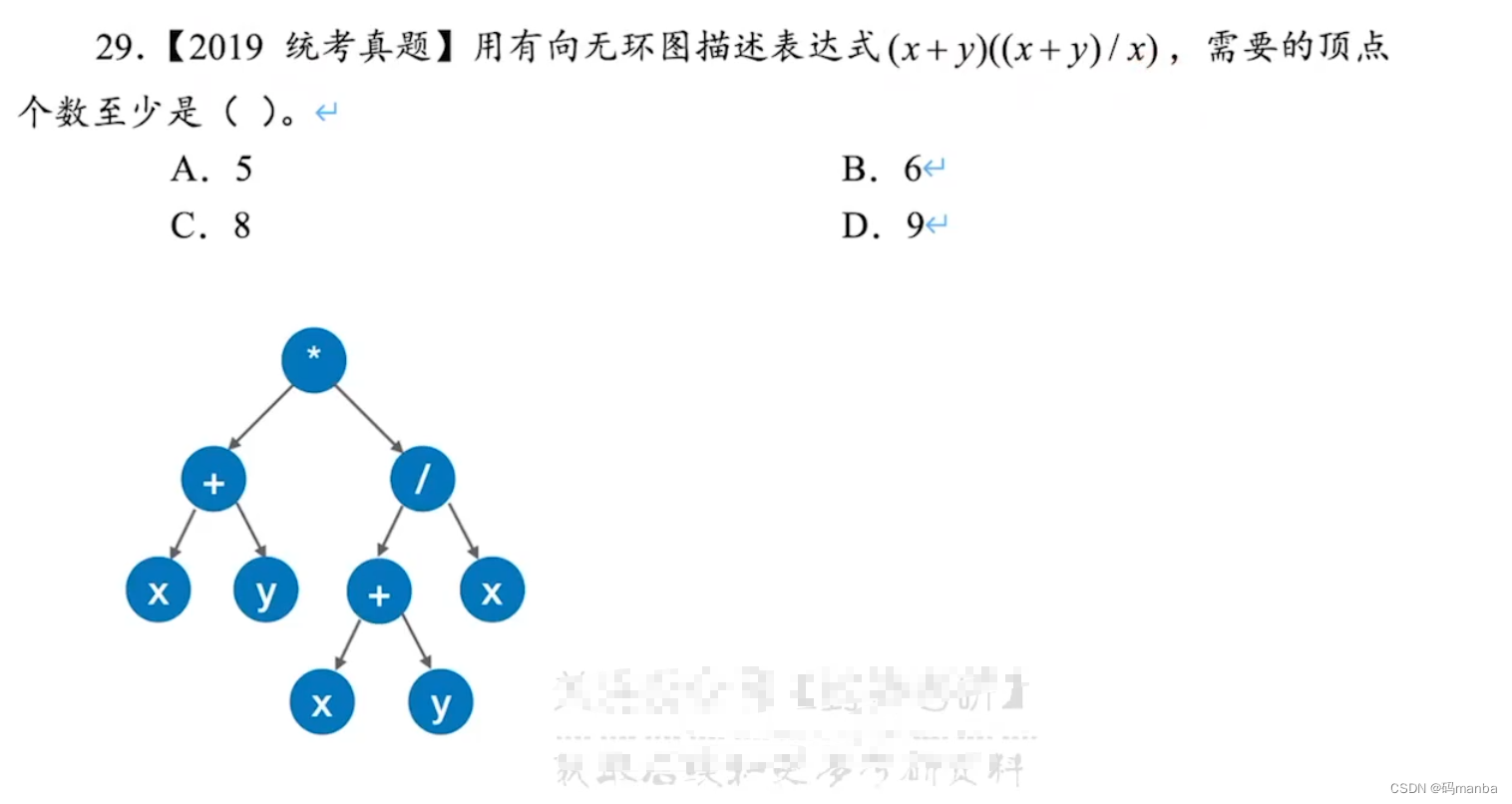
- 答:
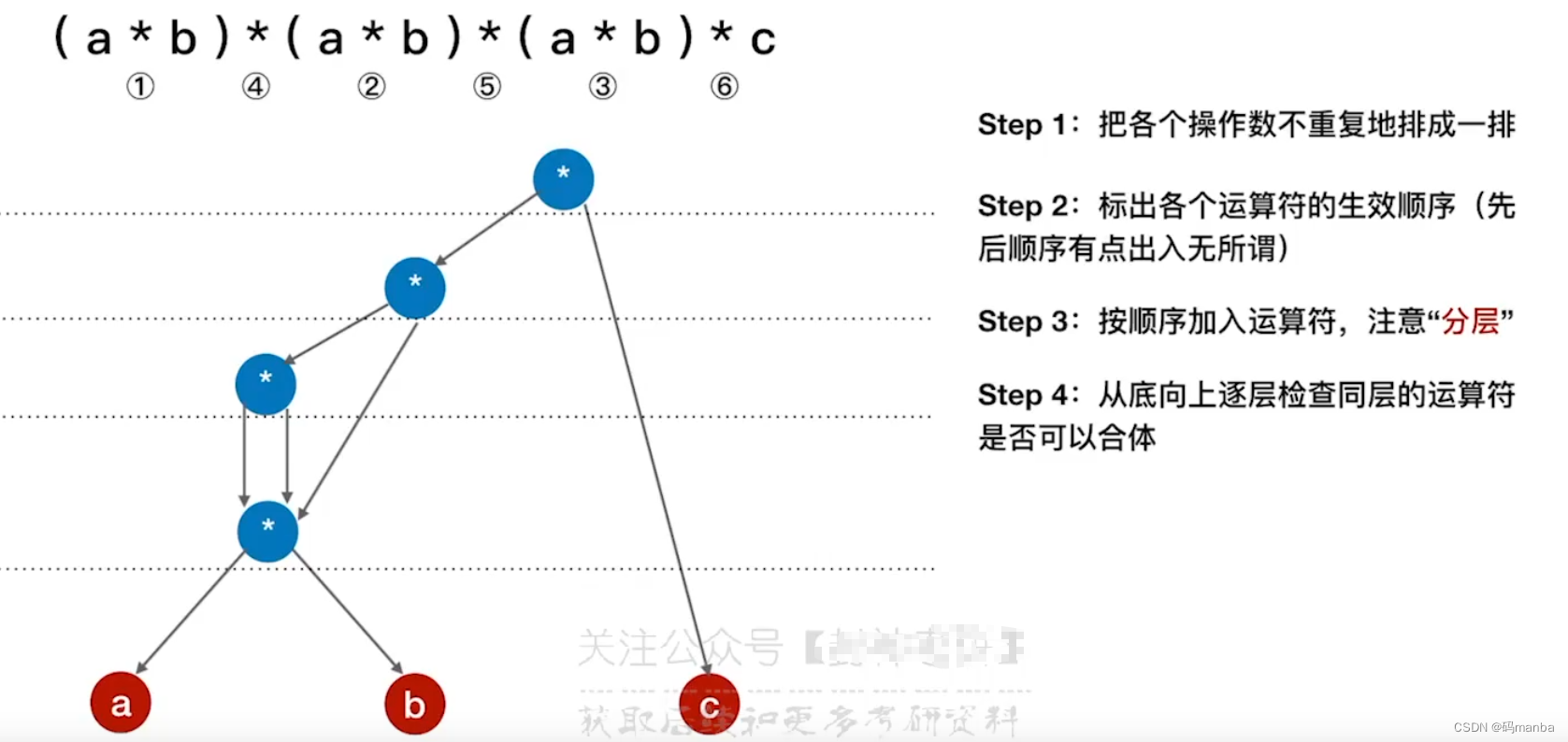
🌙🌙 解题思路
- 在有向无环图的中的操作数是不会重复的

⭐ 先构建 DAG 图

⭐ 分层化简 可消去的结点

🌙 练习解法1

化简
- 换一个 做法排序,结果也就不一样。

4.4 拓扑排序 DAG(有向无环图) 的 第二个应用
什么是 AOV网?

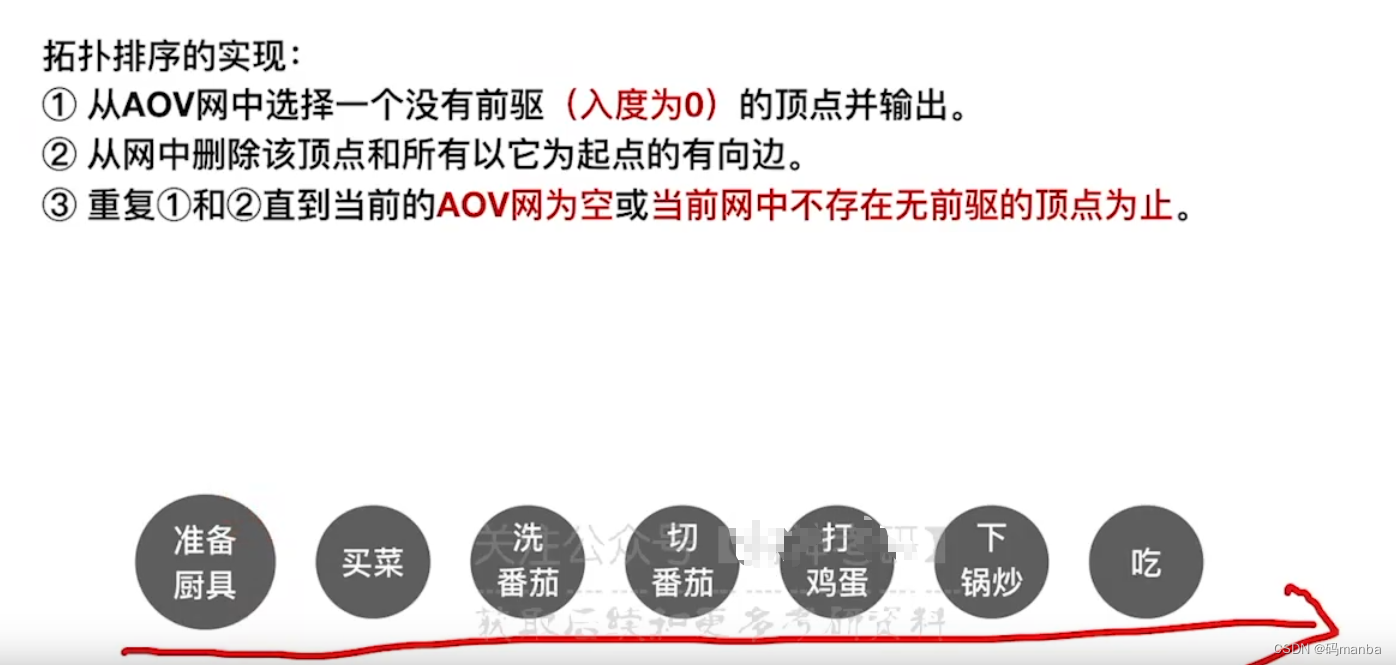
拓扑排序的概念

拓扑排序的实现
- 图中必须没有回路才可以进行拓扑排序。
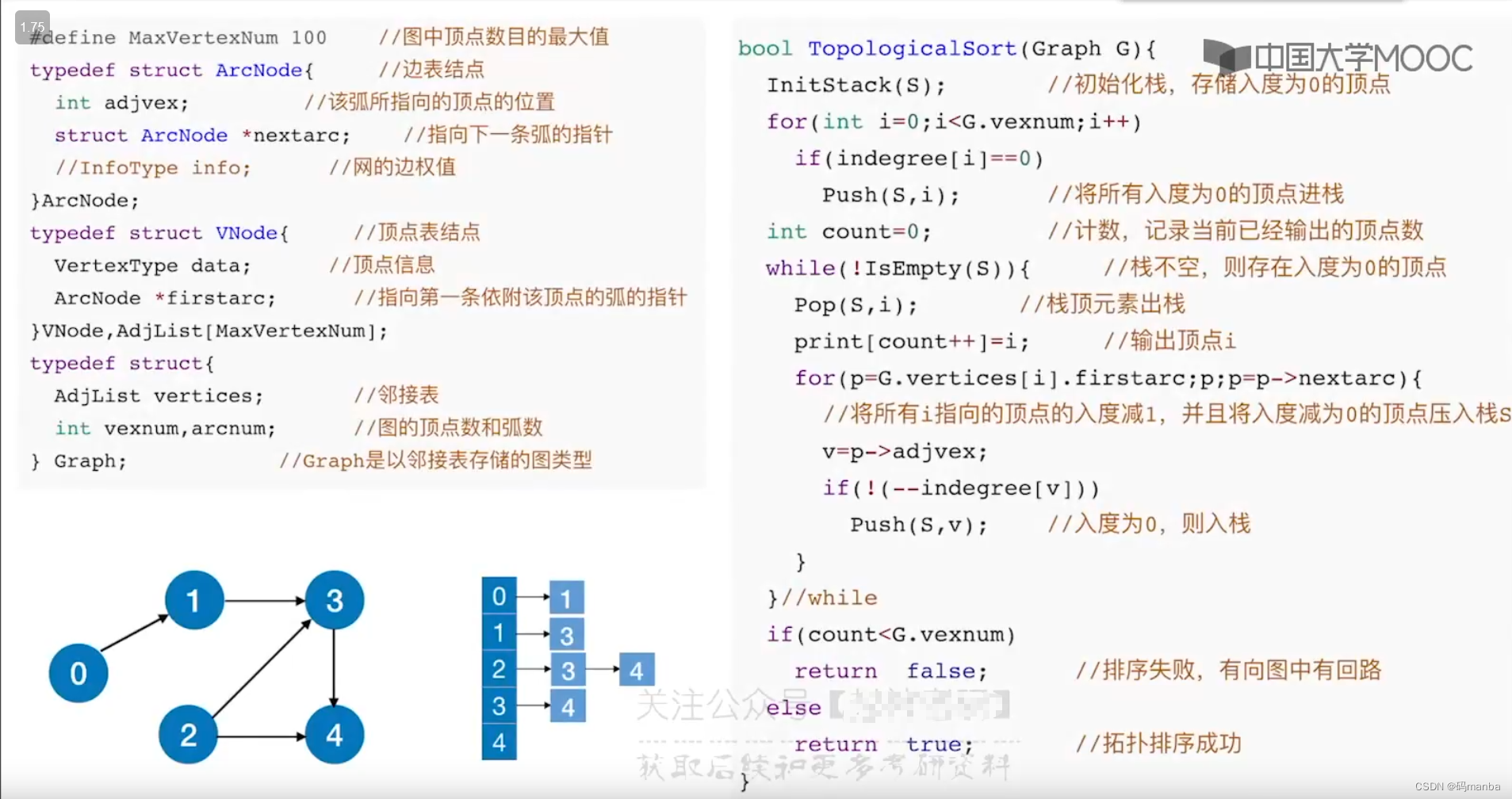
⭐⭐ 代码实现
- 思想
- 先将入度为0的点保存到栈或者队列。

逆拓扑排序
- 检查出度为0的顶点依次输出

逆拓扑排序的实现

⭐⭐
深度优先遍历算法实现拓扑排序
拓扑排序的知识框架

4.5 关键路径
AOE 网

- 只有一个 开始结点(源点);
- 只有一个 结束结点(汇点);
- 有向路径:从源点到汇点的所有路径;
- 关键路径: 从源点到汇点的的所有路径中具有最大长度的路径;
- 关键活动:关键路径上的活动(弧);

- 关键路径是最大路径长度,因此可以包含其中短的路径长度。

⭐ 事件、活动 的最早发生时间
- 事件的最早发生时间: 该事件(点) 的最早发生时间 = 指向它的事件(点) + 指向它的活动(弧)的时间;假如该事件有n个来路,那么取n个(指向它的事件最早时间 + 指向它的 活动时间)其中的最大值。
- 活动的最早发生时间: 就是这个活动的弧尾所连接的事件的最早发生时间。

⭐ 事件、活动 的最迟发生时间- 事件的最迟发生时间: 应该按照逆拓扑排序的顺序从汇点开始计算,汇点的事件发生最迟时间 = 汇点事件最早发生时间; 按逆拓扑排序依次 每个事件的 最迟发生时间 等于 其指向的事件的最迟发生事件 减去 其指向的 活动时间; 该事件如果有n个指向, 那么取其中(指向事件最迟 - 指向活动时间) 的最小值。
- 活动的最迟开始时间: 该活动(弧) 的终点(结点)的最迟发生时间 减去 该活动(结点) 的值 所得的结果; 其实就是看这个活动所指向事件的最晚发生事件,减去该活动完成的事件,恰好到事件开始时,活动结束。

⭐ 通过 活动最早开始时间 和 活动最迟开始时间确定 关键路径!
- 时间余量: 指的是 活动的最晚开始时间减去活动的最早开始时间 所得的 时间差值。
- 当时间余量等于0时, 指的是该活动一点都不可以拖延,就是 关键活动。
- 关键路径就是, 时间余量等于0的 关键活动 串起来的 路径。

🌙 求关键路径的步骤
1.首先我们从源点开始,标出每个事件(点)的最早发生时间。
- 我们找到事件的最早发生时间,就等于找到了活动(弧)的最早发生时间。 它俩相等。
2.然后 我们需要从汇点开始, 推出事件(点)的最迟发生时间。
- 我们标出事件(点)的最迟发生时间后,我们就可以突出活动(弧)的最迟发生时间。
3.然后 我们就可以通过 活动的 最早、最迟开始时间,计算出时间余量;
- 时间余量等于0活动,就是关键活动, 串起来就是我们要求的关键路径。

具体步骤展开:
⭐ 1. 求所有事件的最早发生时间 ve数组。- 先求出图的 拓扑排序。
- 按照拓扑排序求出事件的最早发生时间。
- 计算每个事件的最早发生事件 = 指向该事件的最早发生事件 + 指向该事件的活动的时间;
- 但是如果指向该事件的活动有n条, 那么 该事件的最早发生时间 是 这n个指向的(事件+活动) 的最大值 时间。

⭐2. 求 所有事件的 最迟发生时间 , vl数组;
- 先求出逆拓扑序列;
- 首先求出汇点事件的最迟发生时间,等于其事件最早发生时间。然后按照逆拓扑排序依次计算其余事件的最迟开始时间。
- 按逆拓扑排序依次 每个事件的 最迟发生时间 等于 其指向的事件的最迟发生事件 减去 其指向的 活动时间;
- 该事件如果有n个指向, 那么取其中(指向事件最迟 - 指向活动时间) 的最小值

⭐ 3. 活动的最早发生时间。数组e;- 活动的最早发生时间,就是其弧尾所连接事件的最早发生事件。

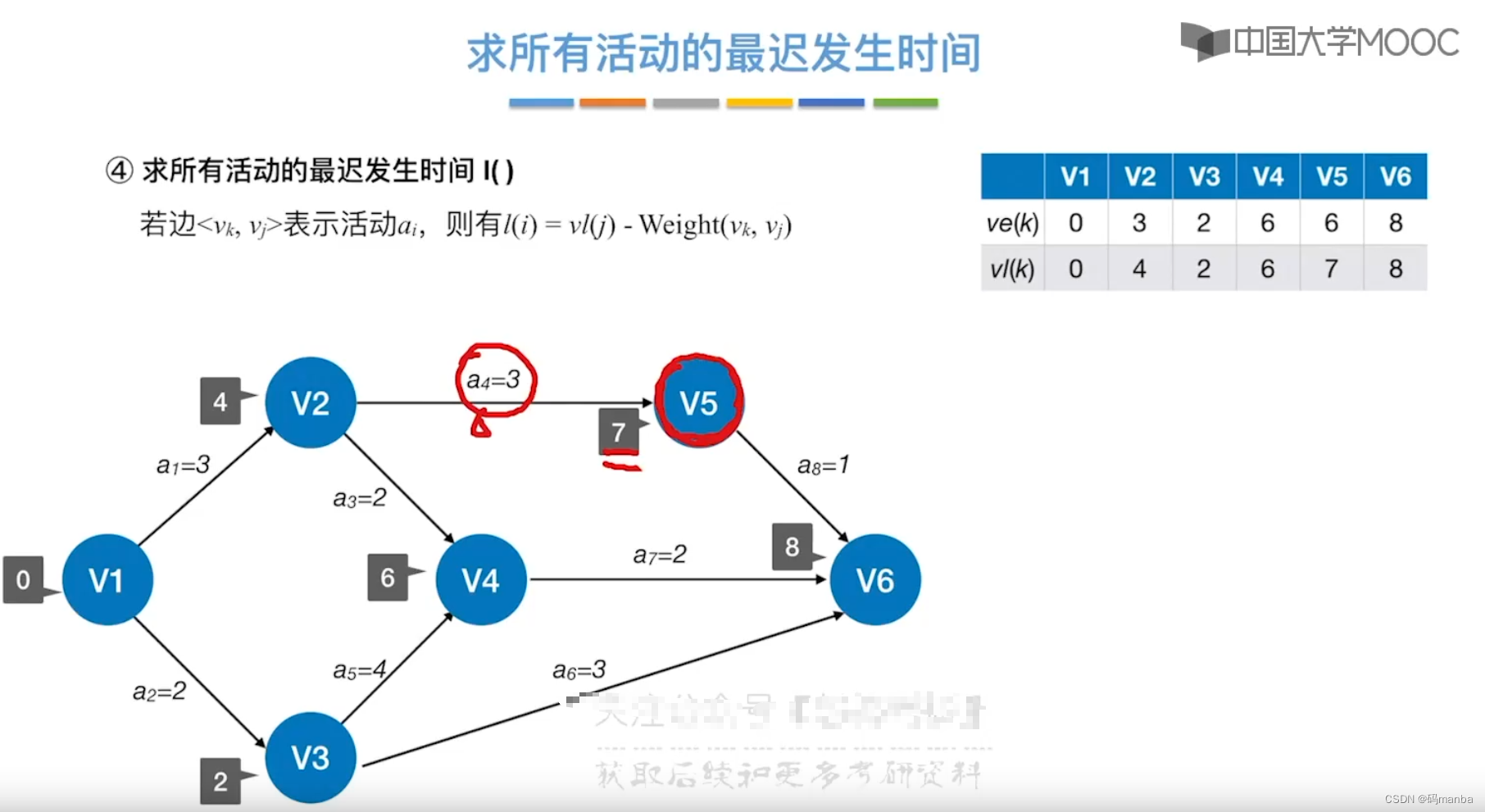
⭐ 4. 活动的 最迟发生时间 数组l;
- 活动的最迟发生时间,就是 该活动弧的弧头(带箭头的一侧)所连接的 事件的最迟发生时间 减去 该活动的权值。
⭐5. 时间余量- 时间余量 = 活动最迟发生时间 减去 活动最早发生时间;
- 时间余量等于0,指关键活动;
- 根据关键活动,我们就找到了关键路径;

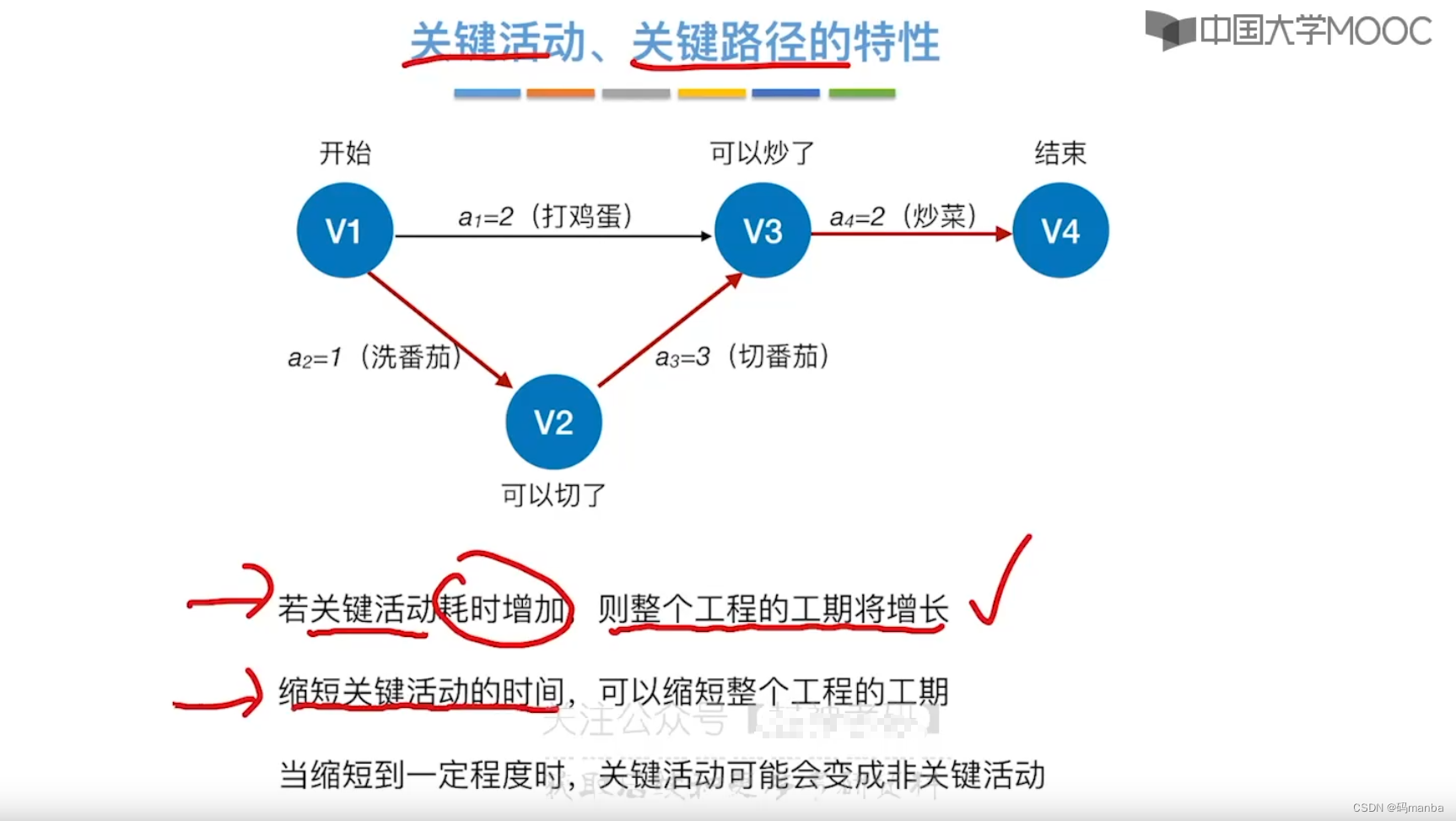
关键活动和关键路径的部分特性
⭐ 关键活动改变时间,会影响项目工期; 当压缩过度可能会使关键路径不再是关键路径。
⭐ AOE网中可能存在多条关键路径,因此如果想改变工期,可以同时压缩不同的两个不在一个关键路径上的关键活动时间,或者压缩一条在同一个关键路径的关键活动。

AOE网知识框架

-
相关阅读:
docker版jxTMS使用指南:python服务之访问数据库
多目标优化算法:基于非支配排序的海象优化算法(NSWOA)MATLAB
java中的异常处理分析
毕业设计-图像绘制系统设计( Matlab机器人工具箱综合应用)
Apache Commons CSV 基本使用
Dev++软件连接Sqlite
Mall脚手架总结(五) —— SpringBoot整合MinIO实现文件管理
计算机网络---物理层疑难点总结
聊聊工业界“AI算法创新”乱象
[附源码]计算机毕业设计JAVA校园失物招领平台
- 原文地址:https://blog.csdn.net/Seven597/article/details/125114091