-
机器人抓取系列——手眼标定
学校快中期答辩了,写几个文章缕清一下最近做的项目中的逻辑和技术细节。
手眼标定
定义:
手眼标定是统一视觉系统和机器人的坐标系,从而可以使视觉系统所确定的物体位姿可以转换到机器人坐标系下,由机械臂完成对物体的作业。
因为自己的项目中用到的是眼在手外的标定方式,因此这里只写眼在手外的标定原理。
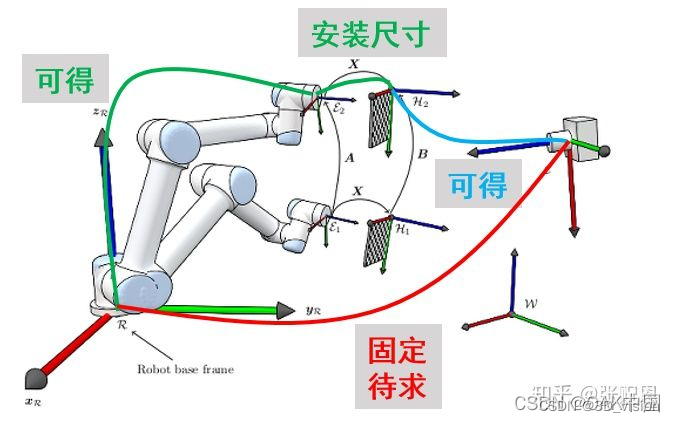
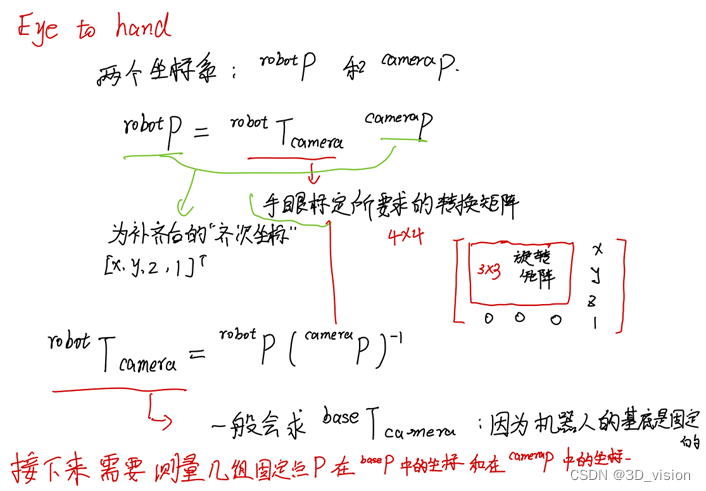
Eye-to-Hand
待求量:相机坐标系和机器人基底坐标系之间的转换关系。
 测量几组固定点P就需要用到棋盘格:
测量几组固定点P就需要用到棋盘格:
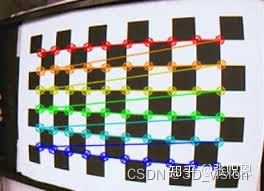
通过识别棋盘格,就可以得到棋盘格角点在相机坐标系中的坐标P,,但是这是二维坐标,通过相机内参和物体的深度信息我们可以计算出来cameraP,接下来我们只需要测量出来对应的棋盘格点在机器人中的坐标baseP,便可以标定出来机器人和相机之间的转换矩阵 baseTcamera。棋盘格在标定的时候,会固定在机器人的末端,而机器人的末端坐标系(end)到基座坐标系(base)可以通过机器人正向运动学计算得到。那么我们可以通过如下关系测量出来棋盘格点在机器人基座坐标系的坐标baseP :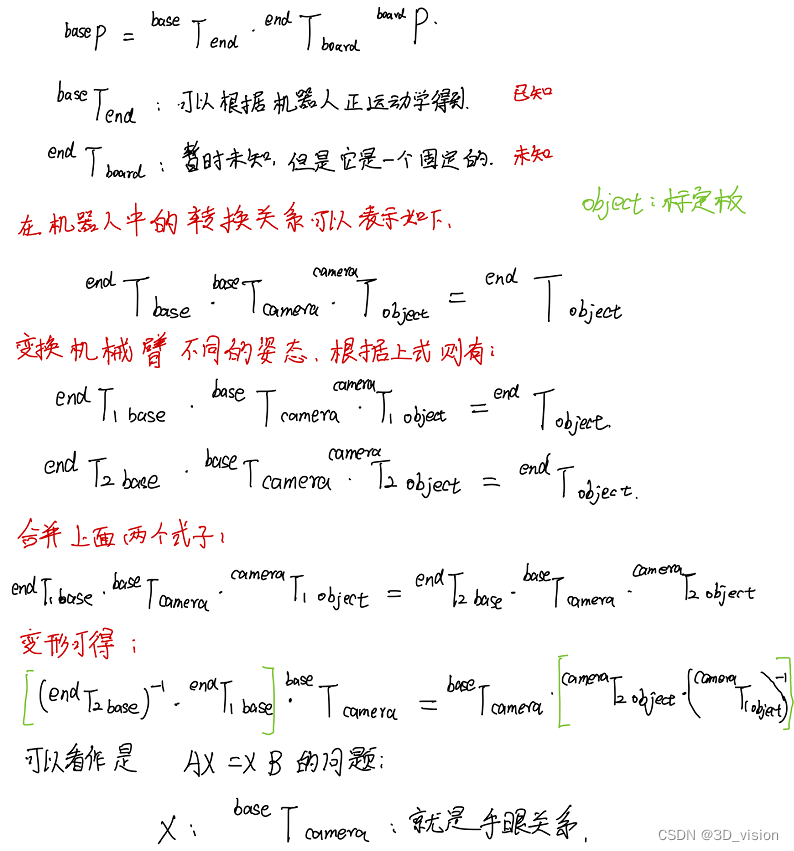 AX=XB的解法可以参考
AX=XB的解法可以参考http://ddrv.cn/a/646817
http://www.360doc.com/content/20/0907/15/29968938_934408908.shtml
-
相关阅读:
P 进阶_(eval 函数)
tomcat安装及配置教程(保姆级)
Mybatis二级缓存源码整理
Seata的部署与微服务集成
GDPU 数据结构 天码行空8
C++常见面试题汇总
java-代码操作服务器之SSH连续发送命令
SpringBoot:通过WebMvcConfigurer来动态修改请求映射
UniApp学习
使用Spring Cloud Sleuth实现分布式应用跟踪和解决问题:帮助开发人员快速定位和解决问题
- 原文地址:https://blog.csdn.net/toCVer/article/details/125262098