-
【杂项学习】Open3D的基本使用
Open3D的基本使用
前言
在处理点云数据时,PCL库的安装和上手难度较大,英特尔的Open3D在性能和开箱即用上表现优异,可以读存、处理和显示各类点云,故做此试验。
准备工作
安装
使用window11下的pychram,配置python3.6的虚拟环境,(PS:open3d到博客写作日期为止,暂时只支持3.6-3.8版本),进行虚拟环境的setting,依次安装open3d,numpy,opencv(optional)
测试数据下载
在gethub上下载open3d的源码,里面包含了我们需要官方提供的测试数据:
isl-org/Open3D: Open3D: A Modern Library for 3D Data Processing (github.com)
测试数据位于:
Open3D-master\\examples\\test_data\\- 1
初步使用
点云显示
简单的使用,显示一个带彩色的点云
import open3d as o3d import numpy as np print("Load a ply point cloud, print it, and render it") #读取点云数据 pcd = o3d.io.read_point_cloud("C:\\Document\\Open3D-master\\examples\\test_data\\fragment.ply") print(pcd) print(np.asarray(pcd.points)) #显示点云数据 o3d.visualization.draw_geometries([pcd], zoom=0.3412, front=[0.4257, -0.2125, -0.8795], lookat=[2.6172, 2.0475, 1.532], up=[-0.0694, -0.9768, 0.2024])- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
显示效果如下所示:
在这里插入图片描述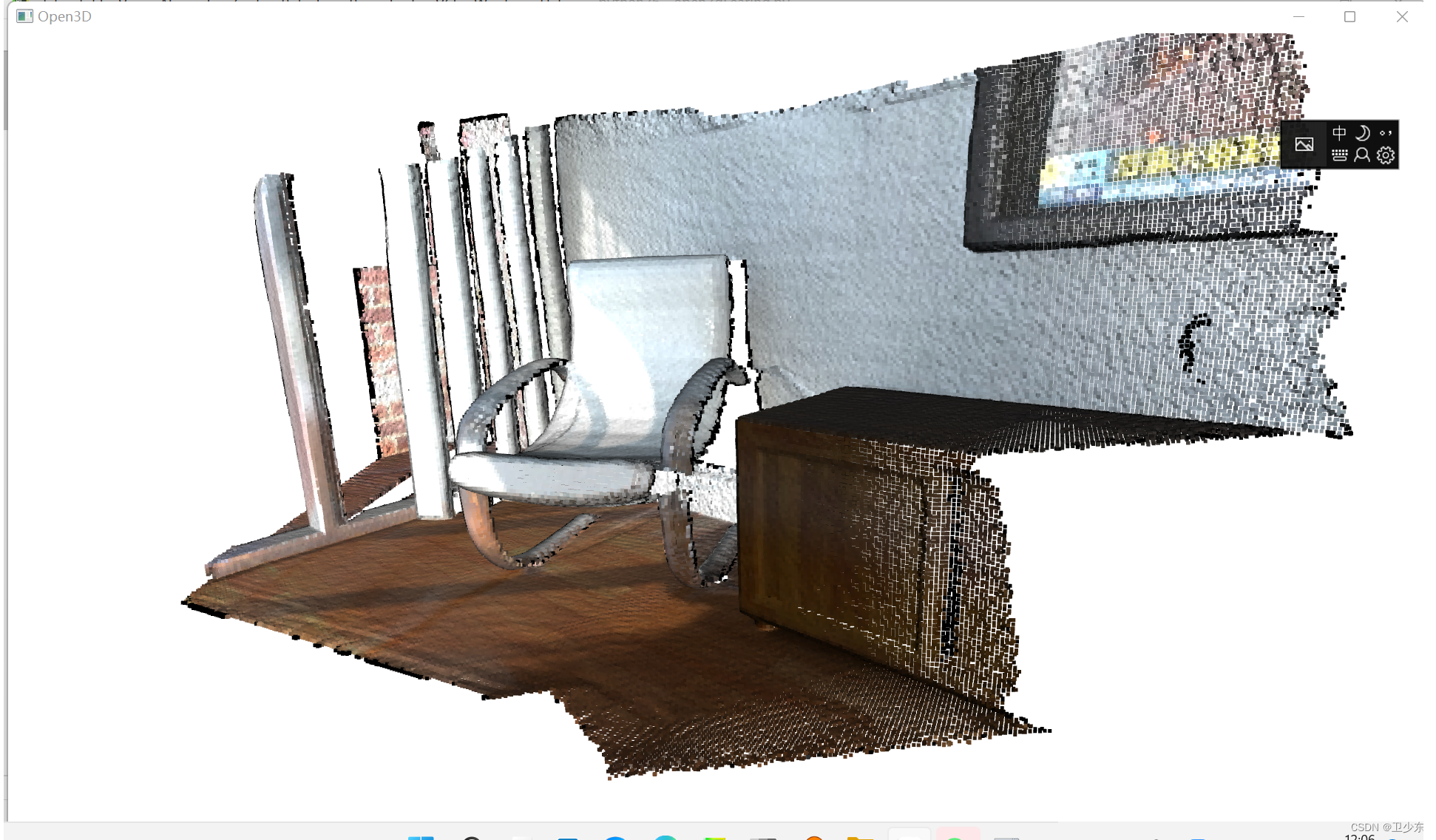

voxel降采样
voxel降采样使用常规体素栅格从输入点云创建均匀下采样点云。通常用于许多点云处理任务的预处理步骤。该算法分两步操作:
1.点被折成voxel。
2.每个占用的体素通过平均内部的所有点生成恰好一个点。
代码在刚才的基础上稍作改动:
import open3d as o3d import numpy as np print("Load a ply point cloud, print it, and render it") pcd = o3d.io.read_point_cloud("C:\\Document\\Open3D-master\\examples\\test_data\\fragment.ply") print("Downsample the point cloud with a voxel of 0.05") downpcd = pcd.voxel_down_sample(voxel_size=0.05) o3d.visualization.draw_geometries([downpcd], zoom=0.3412, front=[0.4257, -0.2125, -0.8795], lookat=[2.6172, 2.0475, 1.532], up=[-0.0694, -0.9768, 0.2024])- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12

可以上一步中较为稠密的点云经过处理已经变得比较稀疏,其用途还需进一步学习。
定点的法线估计
点云的另一个基本操作是点法线估计。按N键查看点法线。键-和+可用于控制法线的长度。
import open3d as o3d import numpy as np print("Load a ply point cloud, print it, and render it") pcd = o3d.io.read_point_cloud("C:\\Document\\Open3D-master\\examples\\test_data\\fragment.ply") print("Downsample the point cloud with a voxel of 0.05") downpcd = pcd.voxel_down_sample(voxel_size=0.05) downpcd.estimate_normals( search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30)) o3d.visualization.draw_geometries([downpcd], zoom=0.3412, front=[0.4257, -0.2125, -0.8795], lookat=[2.6172, 2.0475, 1.532], up=[-0.0694, -0.9768, 0.2024], point_show_normal=True)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
-的效果

+的效果
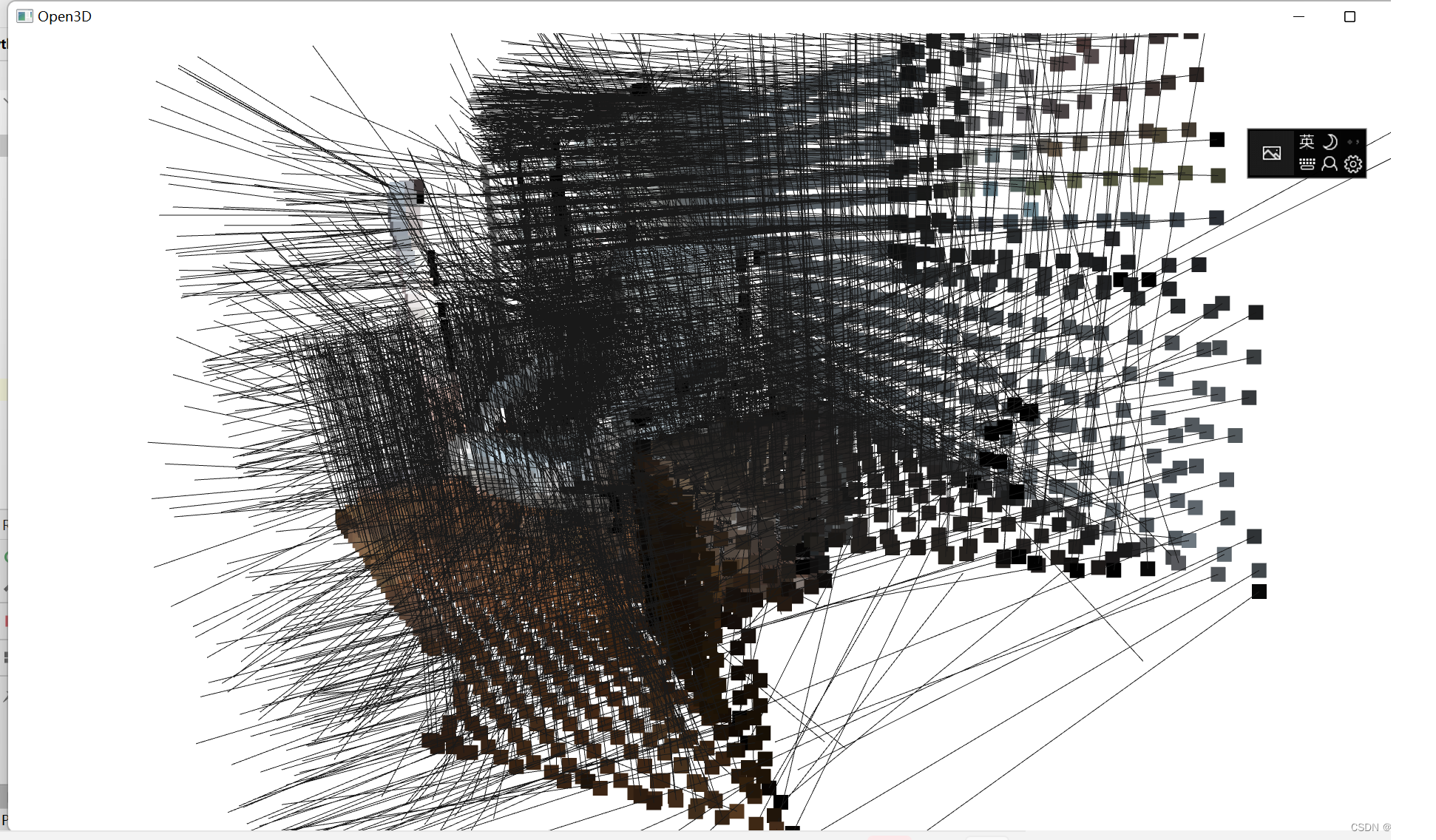
PS:estimate_normals计算每个点的法线。该函数用于查找相邻点,并使用协方差分析计算相邻点的主轴。
该函数将KDTreeSearchParamHybrid类的实例作为参数。两个关键参数radius=0.1和max_nn=30指定搜索半径和最大最近邻。它的搜索半径为10cm,最多只考虑30个邻居以节省计算时间。
-
相关阅读:
闲人闲谈PS之三十二——业务工程预算和PS成本计划
SpringSecurity系列 - 18 SpringSecurity Oauth2 搭建授权服务器和资源服务器
<linux/power_supply_old.h>
FastDFS 一文读懂
什么是物联网技术?
程序开发者的10大开源网站
基于Vue的前端架构,我做了这15点
SVD奇异值分解
牛客练习赛106
【Flink】系统架构
- 原文地址:https://blog.csdn.net/weishaodong/article/details/124864088