-
计算机视觉全系列实战教程:(九)图像滤波操作
1.图像滤波的概述
(1)Why (为什么要进行图像滤波)
- 去噪:去除图像在获取、传输等过程中的各种噪音干扰
- 提取特征:使用特定的图像滤波器提取图像特定特征
(2)What (什么是图像滤波)
使用滤波核对图像进行卷积运算或非线性运算,以达到去噪或提取特征的目的的图像处理技术
2.线性滤波
What:对各像素灰度进行简单处理(乘以一个权重),最后求和
(1)方框滤波
归一化方框滤波器和均值滤波器的核基本一致,主要区别是:是否进行归一化处理,如果不进行归一化处理,则表示的是方框滤波
在opencv中的滤波算法如下:void cv::boxFilter(cv::Mat &imSrc, //输入图像 cv::Mat &imDst, //输出图像 int depth, //图像深度 cv::Size ssize, //方框滤波器的尺寸 cv::Point(-1,-1), //默认以中心点为基准 bool normalize = true, //是否进行归一化处理 int borderType = 4 );(2)均值滤波
均值滤波器的核的元素全是1,并进行了归一化操作:即每个元素都会除以核的总数
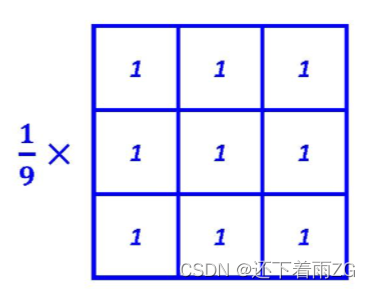
void cv::blur(cv::Mat &imSrc, //输入图像 cv::Mat &imDst, //输出图像 cv::Size ksize, //滤波核的尺寸 Point anchor=Point(-1,-1), //默认以中心点为基准 int borderType=BORDER_DEFA //图像外部像素的边界模式,一般默认值即可 );(3)高斯滤波
形状类似于概率论中的高斯分布模型(正态分布模型)
void cv::GaussianBlur( cv::Mat &imSrc, //输入图像 cv::Mat &imDst, //输出图像 cv::Size ksize, //高斯滤波核的尺寸 double sigmaX, //高斯核函数在X方向的标准偏差 double sigmaY = 0, //高斯核函数在Y方向的标准偏差 int borderType = BORDER_DEFAULT );3.非线性滤波
(1)中值滤波
用像素点领域的灰度值来代替该像素点的灰度值,可以去除最大值和最小值,针对椒盐噪声效果很好
void cv::medianBlur( cv::Mat &imSrc, //输入图像 cv::Mat &imDst, //输出图像 int ksize //中值滤波核的尺寸 );(2)双边滤波
双边滤波能够在保持边缘的前提下实现降噪的目的,缺点是效率较慢
基本原理:考虑两个权重因素来组成卷积核- 空域权重:两点之间的距离,距离越远权重越低
- 值域权重:两点之间的像素值相似程度,越相似权重越大。
void cv::bilalteralFilter( cv::Mat &imSrc, //输入图像 cv::Mat &imDst, //输出图像 double sigmaColor, //值域的标准差 double sigmaSpace, //空间域的标准差 int borderType = BORDER_DEFAULT ); -
相关阅读:
ARM系列 -- 虚拟化(一)
【毕业季】角色转换
【附源码】计算机毕业设计JAVA基于web旅游网站的设计与实现
网络编程【TCP单向通信、TCP双向通信、一对多应用、一对多聊天服务器】(二)-全面详解(学习总结---从入门到深化)
kotlin coroutine源码解析之coroutineContext篇
mulesoft Module 7 quiz 解析
github连接失败Host key verification failed.解决方案
【Elasticsearch】数据简单操作(二)
四大步骤教你发布新闻源软文,媒介盒子无偿分享
如何设计一个面向未来的云原生数据库?
- 原文地址:https://blog.csdn.net/qq_42279379/article/details/139636503