-
STM32-14-FSMC_LCD
【STM32系列文章】
STM32-01-认识单片机
STM32-02-基础知识
STM32-03-HAL库
STM32-04-时钟树
STM32-05-SYSTEM文件夹
STM32-06-GPIO
STM32-07-外部中断
STM32-08-串口
STM32-09-IWDG和WWDG
STM32-10-定时器
STM32-11-电容触摸按键
STM32-12-OLED模块
STM32-13-MPU
STM32-14-FSMC_LCD
STM32-15-DMA
STM32-16-ADC
STM32-17-DAC1. 显示器分类
显示器 举例 优点 缺点 断码屏 数码管、计算器、遥控器 成本低,驱动简单,稳定 色彩单一,显示内容少 点阵屏 户外广告屏 任意尺寸,亮度高 贵,耗电,体积大 LCD屏 显示器、电视屏、手机屏 成本低,色彩好,薄,寿命长 全彩稍差,漏光,拖影 OLED屏 显示器、电视屏、手机屏 自发光,色彩最好,超薄,功耗低 比较贵,寿命短 2. LCD简介
-
简介:
Liquid Crystal Display,即液晶显示器,利用液晶导电后透光性可变的特性,配合显示器光源、彩色滤波片和电压控制等工艺,最终可以在液晶阵列上显示彩色的图像。目前,液晶显示技术以TN、STN、TFT三种技术为主,TFT-LCD即采用了TFT技术的液晶显示器,也叫薄膜晶体管液晶显示器。 -
优点:
- 低成本:低至几块钱的价格
- 高解析度 :高达500像素(500ppi)的分辨率,显示细腻
- 高对比度:高达1000:1的对比度,色彩清晰艳丽
- 响应速度快:高达1ms相应速度,显示效果好
-
LCD的组成:

LCD(液晶显示器)的基本组成包括以下几个主要部分:
-
玻璃基板(Glass Substrates)
- 上玻璃基板(Top Glass Substrate): 通常带有彩色滤光片,用于产生彩色图像。
- 下玻璃基板(Bottom Glass Substrate): 上面布有电极和TFT(薄膜晶体管)阵列,用于控制液晶分子的排列。
-
背光源(Backlight)
背光源提供必要的光源,通常由LED组成,光通过液晶层后形成可见图像。背光源的重要组成部分有:
- 导光板(Light Guide Plate): 将光均匀地分布在整个显示面板上。
- 反射板(Reflector): 反射光线,提高亮度。
- 扩散板(Diffuser): 使光均匀分布。
-
驱动IC
- 驱动IC是LCD屏幕的核心部件之一,负责控制液晶分子的排列,从而控制显示内容。驱动IC通常位于玻璃基板的边缘,通过电极与液晶层相连。驱动IC接收来自显示控制器的信号,并根据这些信号来调整液晶分子的排列,以实现所需的显示效果。
-
-
LCD接口分类:
接口 分辨率 特性 MCU ≤800*480 带SRAM,无需频繁刷新,无需大内存,驱动简单 RGB ≤1280*800 不带SRAM,需要实时刷新,需要大内存,驱动稍微复杂 MIPI 4K 不带SRAM,支持分辨率高,省电,大部分手机屏用此接口 - MCU接口
-
特点:
- 简单控制:MCU(Microcontroller Unit)接口通常用于小尺寸、低分辨率的显示屏。控制简单,适合使用嵌入式系统进行开发。
- 低速数据传输:MCU接口的传输速度相对较低,适合显示静态图片和简单的UI界面。
- 常见类型:
8080和6800并行接口是常见的MCU接口类型,通常有8位、16位、18位和24位数据线。 - 应用场景:适用于家用电器、仪表盘、小型电子设备等不需要高刷新率和高分辨率显示的场景。
-
优缺点:
- 优点:控制简单、成本低、容易实现和调试。
- 缺点:传输速度慢,不适合高分辨率和动态显示需求。
- RGB接口
-
特点:
- 高速数据传输:RGB接口通过多条并行数据线传输红、绿、蓝三种颜色的数据,适合高分辨率和高速刷新显示屏。
- 色彩表现力强:支持24-bit、18-bit等高色深传输,能显示丰富的颜色细节。
- 应用场景:广泛应用于笔记本电脑、平板电脑、电视和高端显示器。
-
优缺点:
- 优点:高传输速度、色彩丰富、适合动态视频和高分辨率图像。
- 缺点:数据线多,连接复杂,布线成本高,对电磁干扰较敏感。
- MIPI接口
-
特点:
- 高带宽低功耗:MIPI(Mobile Industry Processor Interface) DSI(Display Serial Interface)是为移动设备设计的高带宽、低功耗接口,采用高速串行传输。
- 差分信号传输:采用差分信号传输,具有抗干扰能力强的优点。
- 集成度高:减少引脚数,提高数据传输效率,同时支持触摸屏控制信号的传输。
- 应用场景:广泛应用于智能手机、平板电脑、可穿戴设备等便携式电子设备。
-
优缺点:
- 优点:传输速度快、功耗低、抗干扰能力强、引脚数少,适合高分辨率和动态显示需求。
- 缺点:设计和实现较复杂,对硬件设计和信号完整性要求高。
总结:
- MCU接口适合低分辨率、低刷新率的显示应用,控制简单、成本低,但传输速度慢。
- RGB接口适合高分辨率、高刷新率的显示应用,传输速度快、色彩表现力强,但布线复杂、成本高。
- MIPI接口则适合移动设备和便携式电子设备,具有高带宽、低功耗和强抗干扰能力的特点,但实现较复杂。
-
ILI9341驱动芯片:

- MCU接口:可以使用8、9、16或18位接口进行通信;
- SPI接口:可以使用3线或4线SPI接口进行通信;
- RGB接口:可以使用6、16或18位接口进行通信。
-
三基色原理:

在计算机中,颜色通常使用32位的格式表示,称为ARGB888格式,其中A表示Alpha通道,R、G、B分别表示红、绿、蓝三个颜色通道。在单片机中,由于资源限制,颜色通常以16位或24位表示,分别称为RGB565和RGB888格式,其中RGB565使用16位来表示颜色,而RGB888使用24位来表示颜色。
3. LCD驱动原理
-
LCD驱动原理:
LCD屏(MCU接口)驱动的核心是:驱动LCD驱动芯片

-
LCD驱动过程:

-
8080时序:
信号 名称 控制状态 作用 CS 片选 低电平 选中器件,低电平有效,先选中,后操作 WR 写 ↑ 写信号,上升沿有效,用于数据/命令写入 RD 读 ↑ 读信号,上升沿有效,用于数据/命令读取 RS 数据/命令 0=命/1=数 表示当前是读写数据还是命令,也叫DC信号 D[15:0] 数据线 无 双向数据线,可以写入/读取驱动IC数据 -
写时序

void lcd_wr_data(uint16_t data) { LCD_RS(1); /* 操作数据 */ LCD_CS(0); /* 选中 */ LCD_DATA_OUT(data); /* 数据 */ LCD_WR(0); /* WR低电平 */ LCD_WR(1); /* WR高电平 */ LCD_CS(1); /* 释放片选 */ } -
读时序

uint16_t lcd_rd_data(void) { uint16_t ram; /* 定义变量 */ LCD_RS(1); /* 操作数据 */ LCD_CS(0); /* 选中 */ LCD_RD(0); /* RD低电平 */ ram = LCD_DATA_IN; /* 读取数据 */ LCD_RD(1); /* RD高电平 */ LCD_CS(1); /* 释放片选 */ return ram; /* 返回读数 */ }
-
4. LCD驱动芯片
-
驱动芯片用于控制LCD的各种显示功能,整体功能复杂。常见型号ILI9341/ST7789等 。
一般我们只需要6条指令即可完成对LCD的基本使用
指令(HEX) 名称 作用 0XD3 读ID 用于读取LCD控制器的ID,区分型号用 0X36 访问控制 设置GRAM读写方向,控制显示方向 0X2A 列地址 一般用于设置X坐标 0X2B 页地址 一般用于设置Y坐标 0X2C 写GRAM 用于往LCD写GRAM数据 0X2E 读GRAM 用于读取LCD的GRAM数据 -
读ID指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0xD3(读ID指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 将RS设置为高电平(1),表示要读取数据;
- 将CS信号保持低电平,继续选中LCD驱动IC;
- 触发RD信号的上升沿,从LCD驱动IC读取数据
- 读取数据线D[15:0]上的数据,这就是LCD控制器型号。
-
访问控制指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0x36(访问控制指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 设置RS为高电平(1),表示要写入参数数据;
- 将参数数据(MX, MY, MV, BGR)写入数据线D[15:0];
- 再次触发WR信号的上升沿,将参数数据写入LCD驱动IC;
- 将CS信号置为高电平,取消对LCD驱动IC的选中状态。

-
X坐标设置指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0x2A(X坐标设置指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 设置RS为高电平(1),表示要写入参数数据;
- 将起始坐标(SC)写入数据线D[15:0];
- 再次触发WR信号的上升沿,将起始坐标写入LCD驱动IC;
- 将结束坐标(EC)写入数据线D[15:0];
- 再次触发WR信号的上升沿,将结束坐标写入LCD驱动IC;
- 将CS信号置为高电平,取消对LCD驱动IC的选中状态。
-
Y坐标设置指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0x2B(Y坐标设置指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 设置RS为高电平(1),表示要写入参数数据;
- 将起始坐标(SP)写入数据线D[15:0];
- 再次触发WR信号的上升沿,将起始坐标写入LCD驱动IC;
- 将结束坐标(EP)写入数据线D[15:0];
- 再次触发WR信号的上升沿,将结束坐标写入LCD驱动IC;
- 将CS信号置为高电平,取消对LCD驱动IC的选中状态。
-
写GRAM指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0x2C(写GRAM指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 设置RS为高电平(1),表示要写入数据;
- 准备要写入的像素点的颜色值(RGB565格式),写入数据线D[15:0];
- 再次触发WR信号的上升沿,将像素点的颜色值写入LCD驱动IC;
- 如果需要连续写入多个像素点,数据线会自动自增,无需重新设置坐标。
-
读GRAM指令

具体步骤:
- 设置RS为低电平(0),表示要发送命令;
- 将命令0x2E(读GRAM指令)写入数据线D[15:0];
- 将CS信号置为低电平,选中LCD驱动IC;
- 触发WR信号的上升沿,将命令写入LCD驱动IC;
- 设置RS为高电平(1),表示要读取数据;
- 发送dummy数据,读取GRAM中的垃圾数据(dummy);
- 依次读取R1G1和B1R2数据,每次读取一个像素点的颜色;
- 根据RGB565格式的颜色值,提取出红色、绿色和蓝色通道的值,并返回合并后的颜色值。
在这个过程中,需要连续读取3次数据,每次读取一个像素点的颜色值。其中,dummy数据用于丢弃GRAM中的垃圾数据,实际上不会被使用。而读取R1G1和B1R2数据则是实际的颜色值数据,需要根据RGB565格式进行处理,提取出红色、绿色和蓝色通道的值,最终合并成完整的颜色值。
读取某个点颜色函数代码:
uint16_t lcd_rd_data(void) { uint16_t ram; /* 定义变量 */ DATA_IN_MODE(); /* 设置数据输入 */ LCD_RS(1); /* 操作数据 */ LCD_CS(0); /* 选中 */ LCD_RD(0); /* RD低电平 */ ram = LCD_DATA_IN; /* 读取数据 */ LCD_RD(1); /* RD高电平 */ LCD_CS(1); /* 释放片选 */ DATA_OUT_MODE(); /* 设置数据输出 */ return ram; /* 返回读数 */ } uint16_t lcd_read_point(uint16_t x, uint16_t y) { uint16_t r = 0, g = 0, b = 0; /* 定义变量 */ lcd_set_cursor(x, y); /* 设置坐标 */ lcd_wr_regno(0X2E); /* 发读点命令 */ r = lcd_rd_data(); /* 假读 */ r = lcd_rd_data(); /* 读rg */ b = lcd_rd_data(); /* 读b */ g = r & 0XFF; /* 得到g值 */ return (((r >> 11) << 11) | ((g >> 2) << 5) | (b >> 11)); }将红色、绿色和蓝色分量组合成一个16位的颜色值并返回:
- 红色分量:将
r右移11位,获得红色分量的高5位,再左移11位放到返回值的高5位。 - 绿色分量:将
g右移2位,获得绿色分量的高6位,再左移5位放到返回值的中6位。 - 蓝色分量:将
b右移11位,获得蓝色分量的高5位,直接放到返回值的低5位。
这段代码通过指定坐标,发送读取命令,读取并组合红、绿、蓝三种颜色的分量,最后返回组合后的16位颜色值。每个颜色分量都经过适当的移位和合并操作,以符合16位颜色格式。
-
5. LCD基本驱动步骤
-
LCD驱动的一般过程
-
电源初始化:
- 打开LCD电源并进行复位。
- 配置电源电压、时钟等参数。
-
硬件接口初始化:
- 根据LCD的接口类型(MCU接口、RGB接口、MIPI接口等)配置MCU的GPIO引脚和通信协议。

- 根据LCD的接口类型(MCU接口、RGB接口、MIPI接口等)配置MCU的GPIO引脚和通信协议。
-
寄存器配置:
- 通过写入特定命令到LCD控制器寄存器来配置显示参数,例如分辨率、颜色格式、扫描方向等。
-
内存映射:
- 将LCD的显示内存映射到MCU的地址空间,方便后续的读写操作。
-
显示测试:
- 进行显示测试,例如填充屏幕、显示图像等,确保LCD初始化成功。
8080底层操作函数
8080接口是一种并行通信接口,常用于LCD与MCU之间的数据传输。8080底层操作函数:
/* 8080 写数据 */ void lcd_wr_data (uint16_t data) { LCD_RS(1); /* 操作数据 */ LCD_CS(0); /* 选中 */ LCD_DATA_OUT(data); /* 数据 */ LCD_WR(0); /* WR低电平 */ LCD_WR(1); /* WR高电平 */ LCD_CS(1); /* 释放片选 */ } /* 8080 写命令 */ void lcd_wr_regno(uint16_t regno) { LCD_RS(0); /* RS=0,表示写寄存器 */ LCD_CS(0); /* 选中 */ LCD_DATA_OUT(regno);/* 命令 */ LCD_WR(0); /* WR低电平 */ LCD_WR(1); /* WR高电平 */ LCD_CS(1); /* 释放片选 */ }初始化LCD
初始化LCD的过程包括设置电源、配置寄存器和初始化显示内存等步骤。
/* 初始化LCD */ void lcd_init(void) { GPIO_InitTypeDef gpio_init_struct; LCD_BL_GPIO_CLK_ENABLE(); /* LCD_BL脚时钟使能 */ LCD_CS_GPIO_CLK_ENABLE(); /* LCD_CS脚时钟使能 */ LCD_WR_GPIO_CLK_ENABLE(); /* LCD_WR脚时钟使能 */ LCD_RD_GPIO_CLK_ENABLE(); /* LCD_RD脚时钟使能 */ LCD_RS_GPIO_CLK_ENABLE(); /* LCD_RS脚时钟使能 */ LCD_DATA_GPIO_CLK_ENABLE(); /* LCD_DATA脚时钟使能 */ __HAL_RCC_AFIO_CLK_ENABLE(); __HAL_AFIO_REMAP_SWJ_NOJTAG(); /* 禁止JTAG, 使能SWD, 释放PB3,PB4两个引脚做普通IO用 */ gpio_init_struct.Pin = LCD_BL_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽复用 */ gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */ gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */ HAL_GPIO_Init(LCD_BL_GPIO_PORT, &gpio_init_struct); /* LCD_BL引脚模式设置(推挽输出) */ gpio_init_struct.Pin = LCD_CS_GPIO_PIN; HAL_GPIO_Init(LCD_CS_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_CS引脚 */ gpio_init_struct.Pin = LCD_WR_GPIO_PIN; HAL_GPIO_Init(LCD_WR_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_WR引脚 */ gpio_init_struct.Pin = LCD_RD_GPIO_PIN; HAL_GPIO_Init(LCD_RD_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_RD引脚 */ gpio_init_struct.Pin = LCD_RS_GPIO_PIN; HAL_GPIO_Init(LCD_RS_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_RS引脚 */ gpio_init_struct.Pin = LCD_DATA_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */ HAL_GPIO_Init(LCD_DATA_GPIO_PORT, &gpio_init_struct); /* LCD_DATA引脚模式设置 */ LCD_WR(1); /* WR 默认高电平 */ LCD_RD(1); /* RD 默认高电平 */ LCD_CS(1); /* CS 默认高电平 */ LCD_RS(1); /* RS 默认高电平 */ LCD_DATA_OUT(0XFFFF); /* DATA 默认高电平 */ /* 读取ID */ lcd_wr_regno(0xD3); lcddev.id = lcd_rd_data(); /* 假读 */ lcddev.id = lcd_rd_data(); /* 00 */ lcddev.id = lcd_rd_data(); /* 93 */ lcddev.id <<= 8; lcddev.id |= lcd_rd_data(); /* 41 */ printf("lcddev_id:%#x \r\n", lcddev.id); /* 完成初始化序列 */ if (lcddev.id == 0x9341) lcd_ex_ili9341_reginit(); else lcd_ex_st7789_reginit(); /* 对LCD控制结构体赋值 */ lcddev.width = 240; lcddev.height = 320; lcddev.setxcmd = 0x2A; lcddev.setycmd = 0x2B; lcddev.wramcmd = 0x2C; lcd_wr_regno(lcddev.setxcmd); lcd_wr_data(0); lcd_wr_data(0); lcd_wr_data((lcddev.width - 1) >> 8); lcd_wr_data((lcddev.width - 1) & 0XFF); lcd_wr_regno(lcddev.setycmd); lcd_wr_data(0); lcd_wr_data(0); lcd_wr_data((lcddev.height - 1) >> 8); lcd_wr_data((lcddev.height - 1) & 0XFF); /* 设置扫描方向 */ lcd_write_reg(0x36, 1 << 3); /* 点亮背光 */ LCD_BL(1); /* lcd_clear */ lcd_clear(0xFFFF); }实现画点函数
画点函数用于在指定位置显示一个像素点。
/* 画点 */ void lcd_draw_point(uint16_t x, uint16_t y, uint16_t color) { lcd_set_cursor(x, y); lcd_write_ram_prepare(); lcd_wr_data(color); }实现读点函数
读点函数用于读取指定位置的像素点颜色值。
/* LCD读数据 */ uint16_t lcd_rd_data(void) { volatile uint16_t ram; /* 防止被优化 */ GPIO_InitTypeDef gpio_init_struct; /* LCD_DATA 引脚模式设置, 上拉输入, 准备接收数据 */ gpio_init_struct.Pin = LCD_DATA_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_INPUT; gpio_init_struct.Pull = GPIO_PULLUP; gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(LCD_DATA_GPIO_PORT, &gpio_init_struct); LCD_RS(1); /* RS=1,表示操作数据 */ LCD_CS(0); LCD_RD(0); lcd_opt_delay(2); ram = LCD_DATA_IN; /* 读取数据 */ LCD_RD(1); LCD_CS(1); /* LCD_DATA 引脚模式设置, 推挽输出, 恢复输出状态 */ gpio_init_struct.Pin = LCD_DATA_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; gpio_init_struct.Pull = GPIO_PULLUP; gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(LCD_DATA_GPIO_PORT, &gpio_init_struct); return ram; } /* 读点 */ uint16_t lcd_read_point (uint16_t x, uint16_t y) { uint16_t r = 0, g = 0, b = 0; /* 定义变量 */ lcd_set_cursor(x, y); /* 设置坐标 */ lcd_wr_regno(0X2E); /* 发读点命令 */ r = lcd_rd_data(); /* 假读 */ r = lcd_rd_data(); /* 读rg */ b = lcd_rd_data(); /* 读b */ g = r & 0XFF; /* 得到g值 */ return (((r >> 11) << 11) | ((g >> 2) << 5) | (b >> 11)); } -
6. FSMC介绍
1. FSMC简介
Flexible Static Memory Controller,灵活的静态存储控制器。- 用途: 用于驱动SRAM,NOR FLASH,NAND FLASH及PC卡类型的存储器。 它的主要作用是简化对这些存储器的访问,通过配置FSMC外设,可以直接使用指针操作来修改存储单元的内容,而不需要程序员去实现复杂的时序控制。
- 配置好FSMC后,可以定义一个指针指向这些存储器的地址,然后通过对指针的操作来读写存储单元的内容。FSMC会自动完成读写命令和数据访问操作,不需要程序员去关心时序控制的细节。
- FSMC外设配置好就可以模拟出时序。F1/ F4(407)系列大容量型号,且引脚数目在100脚以上的芯片都有FSMC接口,F4/F7/H7系列就是FMC接口。
2. FSMC框图

-
时钟逻辑控制
时钟控制逻辑负责生成和管理FSMC操作所需的时钟信号。这些时钟信号用于同步FSMC内部操作以及与外部设备的通信。主要功能包括:
- 时钟源选择:FSMC可以从系统时钟或其他预定时钟源获取时钟信号。时钟源的选择可能通过配置寄存器进行设置。
- 时钟分频:FSMC内部可以对输入时钟信号进行分频,以生成适合不同操作速度的时钟。分频比通过特定的配置寄存器设置。
- 时钟启停控制:根据需要,可以启动或停止FSMC的时钟,以节省功耗。时钟控制逻辑负责在需要时准确地启动或停止时钟信号。
-
控制单元
FSMC控制单元是FSMC的核心部分,负责管理与外部存储器的交互。主要功能包括:
- 地址映射:将处理器生成的虚拟地址映射到外部存储器的物理地址。这涉及地址总线和片选信号的生成和管理。
- 读写控制:生成读写操作的控制信号(如读使能、写使能)。这些信号用于协调处理器与外部存储器之间的数据传输。
- 时序控制:FSMC控制单元负责控制读写操作的时序,以确保与外部存储器的通信符合时序要求。这包括设置和保持时间的控制。
- 数据总线管理:管理数据总线的方向和数据传输。在读操作时,将外部存储器的数据传送到处理器;在写操作时,将处理器的数据传送到外部存储器。
- 错误检测与纠正:在数据传输过程中进行错误检测,并在可能的情况下进行纠正,以确保数据完整性。
-
通信引脚
通信引脚是FSMC与外部设备(如SRAM、NOR Flash、NAND Flash等)进行实际物理连接的接口。主要引脚包括:

-
使用FSMC驱动LCD

右边是FSMC控制屏幕的过程,使用的是
HADDR总线, CPU通过HADDR总线将控制信息发送给FSMC,然后FSMC再控制SRAM。 8080总线是CPU直接控制屏幕的方式,而HADDR总线是通过配置FSMC来控制屏幕的方式 。
3. FSMC时序

- 模式1:
- 这种模式适用于 SRAM/CRAM 存储器,其时序特性如下:
- 在读操作时,输出使能(OE)在读时序片选过程不翻转。
- 存在 NBL(Narrow Bus Low)信号,用于指示总线宽度。
- 不存在 NADV(NAND Address Valid)信号。
- 这种模式适用于 SRAM/CRAM 存储器,其时序特性如下:
- 拓展模式:
- 拓展模式相对于模式1来说,读写时序时间参数设置可以不同,以满足存储器读写时序不一样的需求。
- 拓展模式包括了模式A、模式B/2、模式C 和模式D,针对不同类型的存储器有不同的时序特性:
- 模式A:适用于 SRAM/PSRAM(CRAM)存储器,与模式1类似,但是在读操作时,输出使能(OE)在读时序片选过程翻转。
- 模式B/2:适用于 NOR FLASH 存储器,读操作时输出使能(OE)在读时序片选过程不翻转,不存在 NBL 信号,但有 NADV 信号。
- 模式C:也适用于 NOR FLASH 存储器,读操作时输出使能(OE)在读时序片选过程翻转,不存在 NBL 信号,但有 NADV 信号。
- 模式D:适用于带地址扩展的异步操作,读操作时输出使能(OE)在读时序片选过程翻转,不存在 NBL 信号,有 NADV 信号,且存在地址保存时间。

4. FSMC地址映射

针对FSMC存储块划分,可以进一步解释如下:
- 外部存储器划分为四个存储块:这意味着STM32可以与四个不同的外部存储器设备通信,每个设备都具有独立的存储空间。
- 每个存储块大小为256M字节:每个存储块都有256M字节的存储空间,可以容纳大量的数据。
- FSMC存储块1划分为四个区:存储块1是FSMC的一个特定区域,它被分成了四个区域,每个区域管理64M字节的空间。这种划分方式可以帮助对存储器进行更灵活的管理和组织。
-
HADDR与FSMC_A关系

-
LCD的RS信号线与地址线关系

5. FSMC相关寄存器
-
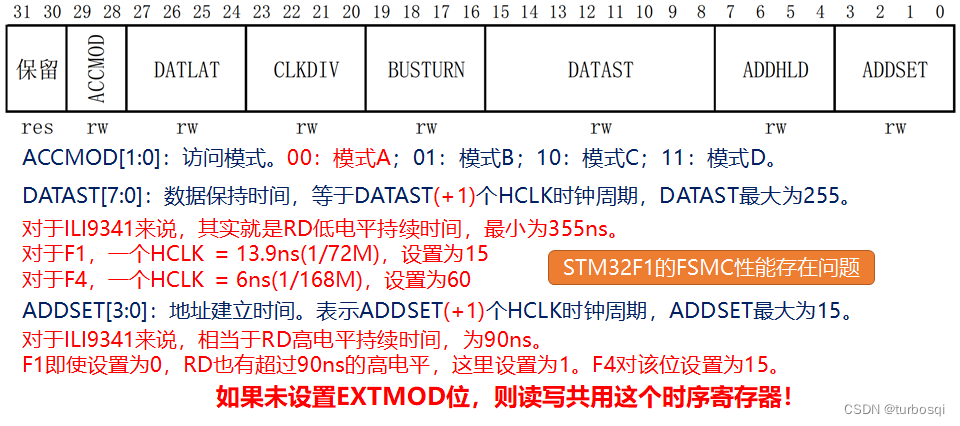
FSMC_BCR4、FSMC_BTR4、FSMC_BWTR4寄存器

-
FSMC_BCRx寄存器

-
FSMC_BTRx寄存器
-
FSMC_BWTRx寄存器


6. FSMC相关库函数
HAL_StatusTypeDef HAL_SRAM_Init ( SRAM_HandleTypeDef *hsram, FSMC_NORSRAM_TimingTypeDef *Timing, FSMC_NORSRAM_TimingTypeDef *ExtTiming )参数:
- SRAM_HandleTypeDef *hsram:这是指向 SRAM 句柄结构的指针。该结构包含了 SRAM 模块的配置信息,如 SRAM 的基地址、数据宽度、存储器库编号等。
- FSMC_NORSRAM_TimingTypeDef *Timing:这是指向 SRAM 读写访问时序结构的指针。
FSMC_NORSRAM_TimingTypeDef结构定义了时序参数,如地址设置时间、数据保持时间、总线转换时间、时钟分频、数据延迟和访问模式等。 - FSMC_NORSRAM_TimingTypeDef *ExtTiming:这是指向扩展模式时序结构的指针(如果使用的话)。扩展模式允许在某些操作需要不同的时序时应用额外的时序配置。
功能:
HAL_SRAM_Init函数通过配置 FSMC 接口中的时序参数来初始化 SRAM 设备。具体步骤如下:- 句柄初始化:函数首先初始化 SRAM 句柄 (
hsram),包括设置基地址和其他配置参数。 - 时序配置:设置 FSMC 的读写时序参数,这包括:
- 地址设置时间:在片选之前设置地址的时间。
- 数据保持时间:在操作完成之前保持数据的时间。
- 访问模式:如异步模式。
- FSMC 配置:配置 FSMC 外设的时序参数,具体包括:
- 设置 FSMC 控制寄存器,定义存储器类型、数据宽度、存储器库和读写时序参数。
- 配置控制信号,如片选、输出使能和写入使能线。
- 扩展模式(可选):如果提供了
ExtTiming参数(非空),函数将配置扩展模式时序参数。扩展模式允许对某些操作使用不同的读写时序。 - 启用 FSMC:一旦设置了时序配置,启用 FSMC 控制器开始与 SRAM 通信。
7. 代码实现
-
LCD初始化函数
void lcd_init(void) { GPIO_InitTypeDef gpio_init_struct; FSMC_NORSRAM_TimingTypeDef fsmc_read_handle; FSMC_NORSRAM_TimingTypeDef fsmc_write_handle; LCD_CS_GPIO_CLK_ENABLE(); /* LCD_CS脚时钟使能 */ LCD_WR_GPIO_CLK_ENABLE(); /* LCD_WR脚时钟使能 */ LCD_RD_GPIO_CLK_ENABLE(); /* LCD_RD脚时钟使能 */ LCD_RS_GPIO_CLK_ENABLE(); /* LCD_RS脚时钟使能 */ LCD_BL_GPIO_CLK_ENABLE(); /* LCD_BL脚时钟使能 */ gpio_init_struct.Pin = LCD_CS_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 推挽复用 */ gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */ gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */ HAL_GPIO_Init(LCD_CS_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_CS引脚 */ gpio_init_struct.Pin = LCD_WR_GPIO_PIN; HAL_GPIO_Init(LCD_WR_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_WR引脚 */ gpio_init_struct.Pin = LCD_RD_GPIO_PIN; HAL_GPIO_Init(LCD_RD_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_RD引脚 */ gpio_init_struct.Pin = LCD_RS_GPIO_PIN; HAL_GPIO_Init(LCD_RS_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_RS引脚 */ gpio_init_struct.Pin = LCD_BL_GPIO_PIN; gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */ HAL_GPIO_Init(LCD_BL_GPIO_PORT, &gpio_init_struct); /* LCD_BL引脚模式设置(推挽输出) */ g_sram_handle.Instance = FSMC_NORSRAM_DEVICE; g_sram_handle.Extended = FSMC_NORSRAM_EXTENDED_DEVICE; g_sram_handle.Init.NSBank = FSMC_NORSRAM_BANK4; /* 使用NE4 */ g_sram_handle.Init.DataAddressMux = FSMC_DATA_ADDRESS_MUX_DISABLE; /* 地址/数据线不复用 */ g_sram_handle.Init.MemoryDataWidth = FSMC_NORSRAM_MEM_BUS_WIDTH_16; /* 16位数据宽度 */ g_sram_handle.Init.BurstAccessMode = FSMC_BURST_ACCESS_MODE_DISABLE; /* 是否使能突发访问,仅对同步突发存储器有效,此处未用到 */ g_sram_handle.Init.WaitSignalPolarity = FSMC_WAIT_SIGNAL_POLARITY_LOW; /* 等待信号的极性,仅在突发模式访问下有用 */ g_sram_handle.Init.WaitSignalActive = FSMC_WAIT_TIMING_BEFORE_WS; /* 存储器是在等待周期之前的一个时钟周期还是等待周期期间使能NWAIT */ g_sram_handle.Init.WriteOperation = FSMC_WRITE_OPERATION_ENABLE; /* 存储器写使能 */ g_sram_handle.Init.WaitSignal = FSMC_WAIT_SIGNAL_DISABLE; /* 等待使能位,此处未用到 */ g_sram_handle.Init.ExtendedMode = FSMC_EXTENDED_MODE_ENABLE; /* 读写使用不同的时序 */ g_sram_handle.Init.AsynchronousWait = FSMC_ASYNCHRONOUS_WAIT_DISABLE; /* 是否使能同步传输模式下的等待信号,此处未用到 */ g_sram_handle.Init.WriteBurst = FSMC_WRITE_BURST_DISABLE; /* 禁止突发写 */ /* FSMC读时序控制寄存器 */ fsmc_read_handle.AddressSetupTime = 0; /* 地址建立时间(ADDSET)为1个HCLK 1/72M = 13.9ns (实际 > 200ns) */ fsmc_read_handle.AddressHoldTime = 0; /* 地址保持时间(ADDHLD) 模式A是没有用到 */ /* 因为液晶驱动IC的读数据的时候,速度不能太快,尤其是个别奇葩芯片 */ fsmc_read_handle.DataSetupTime = 15; /* 数据保存时间(DATAST)为16个HCLK = 13.9 * 16 = 222.4ns */ fsmc_read_handle.AccessMode = FSMC_ACCESS_MODE_A; /* 模式A */ /* FSMC写时序控制寄存器 */ fsmc_write_handle.AddressSetupTime = 0; /* 地址建立时间(ADDSET)为1个HCLK = 13.9ns */ fsmc_write_handle.AddressHoldTime = 0; /* 地址保持时间(ADDHLD) 模式A是没有用到 */ /* 某些液晶驱动IC的写信号脉宽,最少也得50ns */ fsmc_write_handle.DataSetupTime = 1; /* 数据保存时间(DATAST)为2个HCLK = 13.9 * 2 = 27.8ns (实际 > 200ns) */ fsmc_write_handle.AccessMode = FSMC_ACCESS_MODE_A; /* 模式A */ HAL_SRAM_Init(&g_sram_handle, &fsmc_read_handle, &fsmc_write_handle); delay_ms(50); /* 尝试9341 ID的读取 */ lcd_wr_regno(0XD3); lcddev.id = lcd_rd_data(); /* dummy read */ lcddev.id = lcd_rd_data(); /* 读到0X00 */ lcddev.id = lcd_rd_data(); /* 读取0x93 */ lcddev.id <<= 8; lcddev.id |= lcd_rd_data(); /* 读取0x41 */ if (lcddev.id != 0X9341) /* 不是 9341 , 尝试看看是不是 ST7789 */ { lcd_wr_regno(0X04); lcddev.id = lcd_rd_data(); /* dummy read */ lcddev.id = lcd_rd_data(); /* 读到0X85 */ lcddev.id = lcd_rd_data(); /* 读取0X85 */ lcddev.id <<= 8; lcddev.id |= lcd_rd_data(); /* 读取0X52 */ if (lcddev.id == 0X8552) /* 将8552的ID转换成7789 */ { lcddev.id = 0x7789; } if (lcddev.id != 0x7789) /* 也不是ST7789, 尝试是不是 NT35310 */ { lcd_wr_regno(0XD4); lcddev.id = lcd_rd_data(); /* dummy read */ lcddev.id = lcd_rd_data(); /* 读回0X01 */ lcddev.id = lcd_rd_data(); /* 读回0X53 */ lcddev.id <<= 8; lcddev.id |= lcd_rd_data(); /* 这里读回0X10 */ if (lcddev.id != 0X5310) /* 也不是NT35310,尝试看看是不是NT35510 */ { /* 发送秘钥(厂家提供,照搬即可) */ lcd_write_reg(0xF000, 0x0055); lcd_write_reg(0xF001, 0x00AA); lcd_write_reg(0xF002, 0x0052); lcd_write_reg(0xF003, 0x0008); lcd_write_reg(0xF004, 0x0001); lcd_wr_regno(0xC500); /* 读取ID高8位 */ lcddev.id = lcd_rd_data(); /* 读回0X55 */ lcddev.id <<= 8; lcd_wr_regno(0xC501); /* 读取ID低8位 */ lcddev.id |= lcd_rd_data(); /* 读回0X10 */ delay_ms(5); if (lcddev.id != 0X5510) /* 也不是NT5510,尝试看看是不是SSD1963 */ { lcd_wr_regno(0XA1); lcddev.id = lcd_rd_data(); lcddev.id = lcd_rd_data(); /* 读回0X57 */ lcddev.id <<= 8; lcddev.id |= lcd_rd_data(); /* 读回0X61 */ if (lcddev.id == 0X5761)lcddev.id = 0X1963; /* SSD1963读回的ID是5761H,为方便区分,我们强制设置为1963 */ } } } } /* 特别注意, 如果在main函数里面屏蔽串口1初始化, 则会卡死在printf * 里面(卡死在f_putc函数), 所以, 必须初始化串口1, 或者屏蔽掉下面 * 这行 printf 语句 !!!!!!! */ printf("LCD ID:%x\r\n", lcddev.id); /* 打印LCD ID */ if (lcddev.id == 0X7789) { lcd_ex_st7789_reginit(); /* 执行ST7789初始化 */ } else if (lcddev.id == 0X9341) { lcd_ex_ili9341_reginit(); /* 执行ILI9341初始化 */ } else if (lcddev.id == 0x5310) { lcd_ex_nt35310_reginit(); /* 执行NT35310初始化 */ } else if (lcddev.id == 0x5510) { lcd_ex_nt35510_reginit(); /* 执行NT35510初始化 */ } else if (lcddev.id == 0X1963) { lcd_ex_ssd1963_reginit(); /* 执行SSD1963初始化 */ lcd_ssd_backlight_set(100); /* 背光设置为最亮 */ } lcd_display_dir(0); /* 默认为竖屏 */ LCD_BL(1); /* 点亮背光 */ lcd_clear(WHITE); } -
主函数
int main(void) { uint8_t lcd_id[12]; HAL_Init(); /* 初始化HAL库 */ sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */ delay_init(72); /* 延时初始化 */ usart_init(115200); /* 串口初始化为115200 */ led_init(); /* 初始化LED */ oled_init(); lcd_init(); /* 初始化LCD */ sprintf((char *)lcd_id, "LCD ID:%04X", lcddev.id); /* 将LCD ID打印到lcd_id数组 */ while (1) { lcd_show_string(10, 40, 240, 32, 32, "STM32", GREEN); lcd_show_string(10, 80, 240, 24, 24, "TFTLCD TEST", BLUE); lcd_show_string(10, 110, 240, 16, 16, "ATOM@ALIENTEK", RED); lcd_show_string(10, 130, 240, 16, 12, (char *)lcd_id, RED); /* 显示LCD ID */ oled_show_string(0, 5, "STM32", 24); oled_show_string(0, 33, "TFTLCD TEST", 16); oled_show_string(0, 51, "ATOM@ALIENTEK", 12); oled_refresh_gram(); LED0_TOGGLE(); /*红灯闪烁*/ delay_ms(1000); } } -
实验结果

声明:资料来源(战舰STM32F103ZET6开发板资源包)
- Cortex-M3权威指南(中文).pdf
- STM32F10xxx参考手册_V10(中文版).pdf
- STM32F103 战舰开发指南V1.3.pdf
- STM32F103ZET6(中文版).pdf
- 战舰V4 硬件参考手册_V1.0.pdf
-
-
相关阅读:
02-Go语言基础变量和常量
vue前端项目配置
【Qt】QCheckBox
聊聊pert图的那些事儿~
代码随想录训练营补充|图论|Golang
数据分类分级指南分级方法
【LINUX】CentOS有用的基础软件安装(小白版)
判断某点是否在三角形内(Python)
逸飞激光在科创板IPO过会:前三季度营收约3亿元,同比增长59%
深度学习10——卷积神经网络
- 原文地址:https://blog.csdn.net/Lshuangye/article/details/139333996