-
木叶飞舞之【机器人ROS2】篇章_第三节、给turtlebot3安装realsense深度相机
系列文章目录
【ROS2大白话】一、ROS2 humble及cartorgrapher安装
【ROS2大白话】二、turtlebot3安装
【ROS2大白话】三、给turtlebot3安装realsense深度相机
【ROS2大白话】四、ROS2非常简单的传参方式
我们做视觉slam时会用到深度相机,但是gazebo的turtlebot3中只有rgb相机,没有深度,因此本节会修改代码,来给我们的小乌龟增加一个rgbd相机。
效果展示
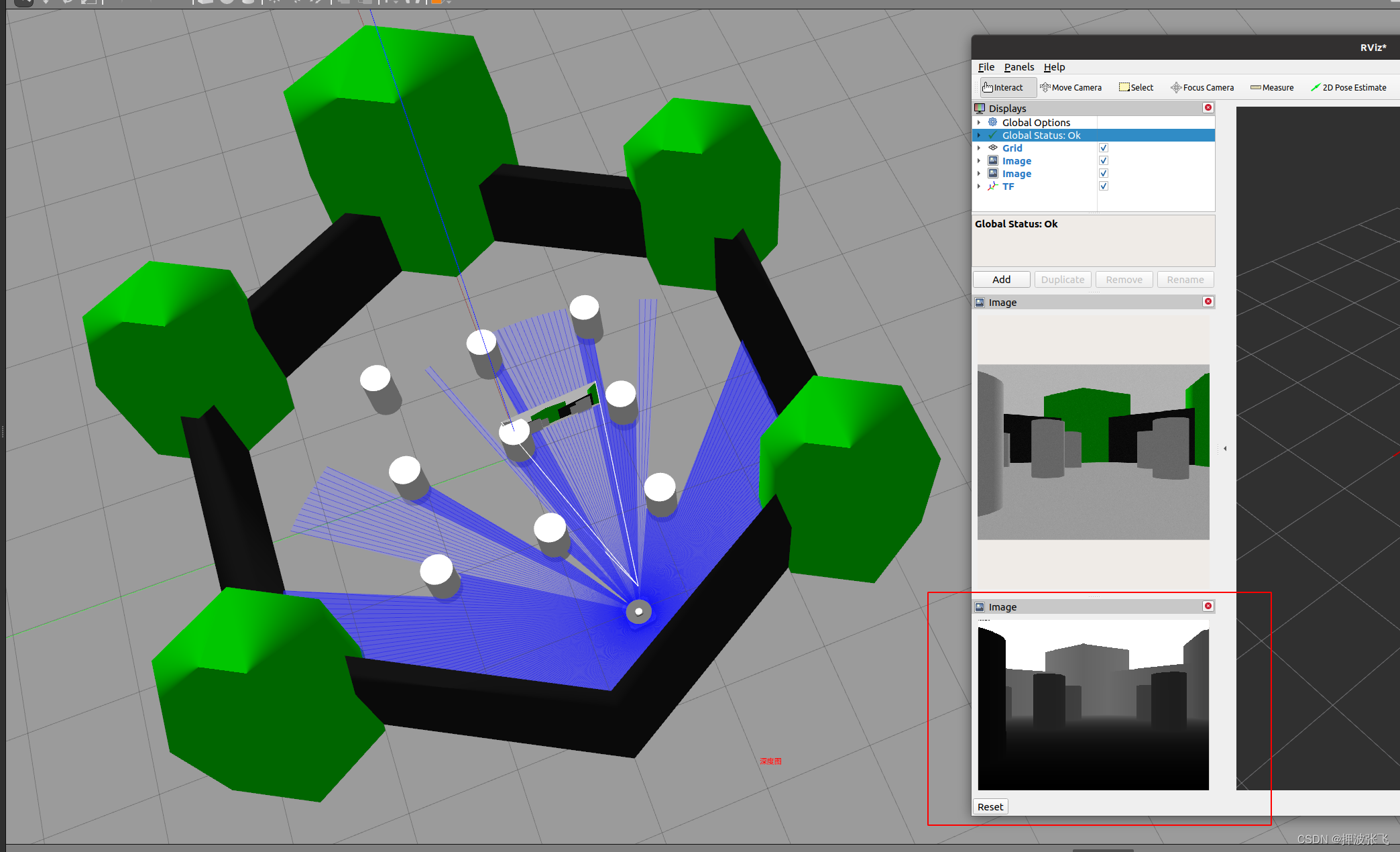
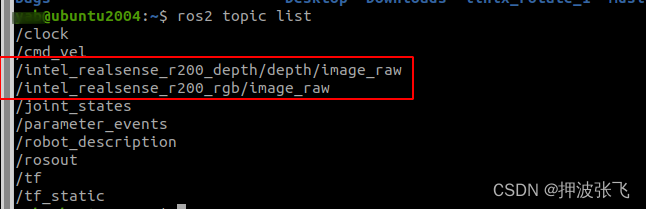
- 发布topic如下图
图片大小都是640*480
一、修改model.sdf文件
1. 路径位置
/opt/ros/humble/share/turtlebot3_gazebo/models/turtlebot3_waffle/model.sdf2. 修改代码
最好将原来的model.sdf做一个备份。然后将下面的代码全部复制替换。
0.0 0.0 0.0 0.0 0.0 0.0 -0.064 0 0.048 0 0 0 0.001 0.000 0.000 0.001 0.000 0.001 1.0 -0.064 0 0.048 0 0 0 0.265 0.265 0.089 -0.064 0 0 0 0 0 model://turtlebot3_waffle/meshes/waffle_base.dae 0.001 0.001 0.001 true 200 0.0 2e-4 0.0 2e-4 0.0 2e-4 0.0 1.7e-2 0.0 1.7e-2 0.0 1.7e-2 ~/out:=imu -0.052 0 0.111 0 0 0 0.001 0.000 0.000 0.001 0.000 0.001 0.125 -0.052 0 0.111 0 0 0 0.0508 0.055 -0.064 0 0.121 0 0 0 model://turtlebot3_waffle/meshes/lds.dae 0.001 0.001 0.001 true true -0.064 0 0.121 0 0 0 5 360 1.000000 0.000000 6.280000 0.120000 3.5 0.015000 gaussian 0.0 0.01 ~/out:=scan sensor_msgs/LaserScan base_scan 0.0 0.144 0.023 -1.57 0 0 0.001 0.000 0.000 0.001 0.000 0.001 0.1 0.0 0.144 0.023 -1.57 0 0 0.033 0.018 100000.0 100000.0 0 0 0 0.0 0.0 0 0.2 1e+5 1 0.01 0.001 0.0 0.144 0.023 0 0 0 model://turtlebot3_waffle/meshes/left_tire.dae 0.001 0.001 0.001 0.0 -0.144 0.023 -1.57 0 0 0.001 0.000 0.000 0.001 0.000 0.001 0.1 0.0 -0.144 0.023 -1.57 0 0 0.033 0.018 100000.0 100000.0 0 0 0 0.0 0.0 0 0.2 1e+5 1 0.01 0.001 0.0 -0.144 0.023 0 0 0 model://turtlebot3_waffle/meshes/right_tire.dae 0.001 0.001 0.001 -0.177 -0.064 -0.004 0 0 0 0.001 0.00001 0.000 0.000 0.00001 0.000 0.00001 0.005000 0 0.2 1e+5 1 0.01 0.001 -0.177 0.064 -0.004 0 0 0 0.001 0.00001 0.000 0.000 0.00001 0.000 0.00001 0.005000 0 0.2 1e+5 1 0.01 0.001 0.069 -0.047 0.107 0 0 0 0.001 0.000 0.000 0.001 0.000 0.001 0.035 0 0.047 0 0 0 0 0.008 0.130 0.022 0.069 -0.047 0.107 0 0 0 1 30 0.064 -0.047 0.107 0 0 0 640 480 R8G8B8 0.02 10 intel_realsense_r200_depth realsense_depth_frame 0.07 0.001 true true 30 0.064 -0.047 0.107 0 0 0 1.02974 640 480 R8G8B8 0.02 300 gaussian 0.0 0.007 intel_realsense_r200_rgb realsense_rgb_frame 0.07 base_footprint base_link 0.0 0.0 0.010 0 0 0 base_link wheel_left_link 0.0 0.144 0.023 -1.57 0 0 0 0 1 base_link wheel_right_link 0.0 -0.144 0.023 -1.57 0 0 0 0 1 base_link caster_back_right_link base_link caster_back_left_link base_link base_scan -0.064 0 0.121 0 0 0 0 0 1 base_link realsense_link 30 wheel_left_joint wheel_right_joint 0.287 0.066 20 1.0 cmd_vel true true false odom odom base_footprint ~/out:=joint_states 30 wheel_left_joint wheel_right_joint 二、修改urdf文件
1. 路径位置
/opt/ros/humble/share/turtlebot3_description/urdf/turtlebot3_waffle.urdf2. 修改代码
同样,原代码先备份一个。同时用下面代码全部替换。
加载gazebo需要等待几分钟,因为深度相机中有点云发布,比较占资源。
好了,有问题就评论区回复。 - 发布topic如下图
-
相关阅读:
c# 用非递归的写法实现递归
【必会】Kafka基本概念(topic、partition、offset、broker、生产者、消费者、消费者组等)【知识点速记速查】
netty 完善线程及Handler名称、netty的日志
配置Super-VLAN下的DHCP服务器示例
UART 串口通信实验
大数据调度工具azkaban的安装,配置
牛客刷题——剑指offer(第7期)
攻防演习防御体系构建之第二篇之应对攻击的常用策略
ip_vs 原理解析 (四)hook 后的开始 NF_INET_LOCAL_OUT
数据挖掘与分析课程笔记(Chapter 14)
- 原文地址:https://blog.csdn.net/ryanji/article/details/139317683