-
【STM32】定时器与PWM的LED控制
一、要求
- 使用STM32F103的 Tim2~Tim5其一定时器的某一个通道pin(与GPIOx管脚复用,见下图),连接一个LED,用定时器计数方式,控制LED以2s的频率周期性地亮-灭。
- 接上,采用定时器PWM模式,让 LED 以呼吸灯方式渐亮渐灭,周期为1~2秒,自己调整占空比变化到一个满意效果。
二、定时器中断与PWM介绍
1、定时器类型

STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM42、定时器中断基本结构

3、预分频器时序与计数器时序
(1)预分频器时序

计数器计数频率:CK_CNT = CK_PSC / (PSC + 1)
(2)计数器时序

计数器溢出频率:CK_CNT_OV = CK_CNT / (ARR + 1)= CK_PSC / (PSC + 1) / (ARR + 1)
3、PWM
(1)简介
1.PWM(Pulse Width Modulation)脉冲宽度调制
2.在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域
3。PWM参数:
频率 = 1 / TS
占空比 = TON / TS
分辨率 = 占空比变化步距

(2)输出比较模式

(3)PWM基本结构及参数计算
PWM基本结构

PWM参数计算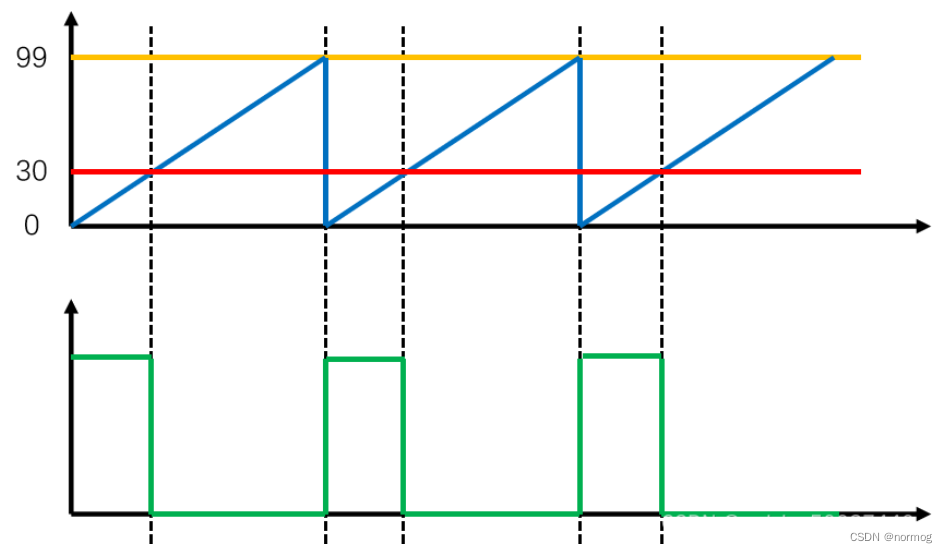
PWM频率:Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比:Duty = CCR / (ARR + 1)
PWM分辨率:Reso = 1 / (ARR + 1)三、实践
1、定时器中断点灯
代码:
Timer.c:#include "stm32f10x.h" // Device header void Timer_Init(void) { RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); TIM_InternalClockConfig(TIM2); TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; TIM_TimeBaseInitStructure.TIM_Prescaler = 14400 - 1; TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); TIM_ClearFlag(TIM2, TIM_FLAG_Update); TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); TIM_Cmd(TIM2, ENABLE); }Timer.h:
#ifndef __TIMER_H #define __TIMER_H void Timer_Init(void); #endifmain.c:
#include "stm32f10x.h" // Device header #include "Delay.h" #include "LED.h" #include "Timer.h" int main(void) { LED_Init(); Timer_Init(); while (1) { } } void TIM2_IRQHandler(void) { if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) { LED_Turn(); TIM_ClearITPendingBit(TIM2, TIM_IT_Update); } }结果:

2、定时器PWM模式点灯
代码:
PWM.C:#include "stm32f10x.h" // Device header void PWM_Init(void) { RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); TIM_InternalClockConfig(TIM2); TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCStructInit(&TIM_OCInitStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; //CCR TIM_OC1Init(TIM2, &TIM_OCInitStructure); TIM_Cmd(TIM2, ENABLE); } void PWM_SetCompare1(uint16_t Compare) { TIM_SetCompare1(TIM2, Compare); }PWM.H:
#ifndef __PWM_H #define __PWM_H void PWM_Init(void); void PWM_SetCompare1(uint16_t Compare); #endifMAIN.C:
#include "stm32f10x.h" #include "Delay.h" #include "PWM.h" uint8_t i; int main(void) { PWM_Init(); while (1) { for (i = 0; i <= 100; i++) { PWM_SetCompare1(i); Delay_ms(10); } for (i = 0; i <= 100; i++) { PWM_SetCompare1(100 - i); Delay_ms(10); } } }结果:

四、总结
这次STM32定时器及PWM实验让我深入了解了这些功能的工作原理和实现方式。通过动手实践和解决问题,我不仅提高了自己的编程技能,还对嵌入式系统开发有了更深入的认识。
以上为此次学习成果,若有问题,烦请指正。五、引用
链接: STM32CubeMX & Keil——STM32F103C8T6:PWM控制LED灯
链接: PWM频率计算 测频法 测周法 输出比较与输入捕获
链接: 定时器&PWM应用编程 -
相关阅读:
【6】c++设计模式——>UML表示类之间的依赖关系
身份证读卡器跟OCR有何区别?哪个好?
git使用整理
GCC
lock4j--分布式锁中间件--自定义获取锁失败的逻辑
mysql学习之mysql集群
Outlook设置邮箱签名
C++初阶(vector容器+模拟实现)
电子学:第009课——实验 7:研究继电器
东京计器电控型柱塞泵比例放大器
- 原文地址:https://blog.csdn.net/normog/article/details/139358947