-
GitHub/R3D3项目环境配置踩坑记录
1、前言
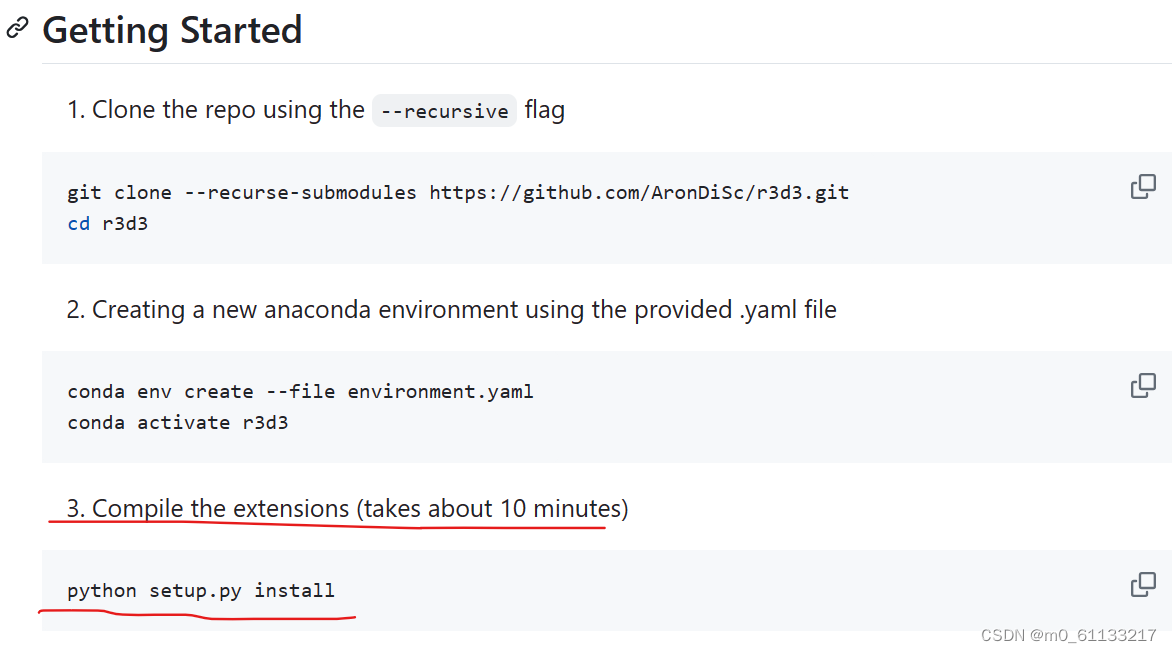
项目链接地址:SysCV/r3d3 (github.com)
按照安装步骤容易出现的问题,environment.yaml文件中安装相关包,其中还有两个pip install git+https://github.com/..........这两个建议注释掉,后面再来安装这两个。
2、问题及解决办法
创建好环境后,再来装
pip install 'git+https://github.com/TRI-ML/dgp.git@v1.5'
pip install 'git+https://github.com/facebookresearch/pytorch3d.git@v0.7.0'
这两个包,进入其中的github中去,安装依赖的版本包要求,可以按照它给出的安装步骤进行安装,里面的所有包都安装好后,再来装,不会出错。
特别注意pytorch3d中的要求,要和pytorch,torchvision等版本对应再装pytorch3d,还有cuda。按照安装步骤安装,不要pip install 'git+https://....'安装,自己错过几次错误。
卡在这里很久,个人觉得版本0.7.0/0.7.2等差别不是很大,符合torch要求即可。(像套娃,但要注意个包版本,冲突的更换版本)。其它的小包运行再缺啥装啥。
2.1、这个lietorch库
这里出现的额问题有好多,主要是lietorch这个库需要编译。
2.2、cuda算力不支持
查看自己的cuda版本是否支持自己的GPU设备(sm_89自己的4060)
命令:nvcc --list-gpu-arch
使用了nvcc11.7的发现不支持,换成了11.8的支持了(虽然cuda11.8和自己使用的torch版本不匹配,编译时说了不是问题),setup.py中的文件也要改一下。网上有解决办法,找不到链接了,好找。
2.3、thirdparty
其中需要找到第三方库lietorrch,解决办法参考链接:Droid-slam 模型安装教程_安装lietorch-CSDN博客
还有vidar库需要找到,安装编译Eigen库
3、其它
安装运行过程中可能出现的问题,
NameError: name 'Quaternion is not defined。可能是nuscenes-devkit未装。
pydantic版本过高问题。
rosbags问题:https://blog.csdn.net/simulation2019/article/details/136456999Jetson AGX Orin 下 evo 安装与报错解决_no mudule named rosbags.serde.serdes-CSDN博客
-
相关阅读:
python 内置函数或函数(争取日更)
python自学
什么是文档测试你知道吗?
WebWall-05.SQL-Inject(SQL注入漏洞)
Spring Boot技术知识点:Spring Boot2.7以上支持使用Swagger3
有哪些手机赚钱的副业?
微信小程序获取蓝牙信标
【Rust日报】2022-06-25 世界上最大的软件项目的内存安全
python刷算法的一些骚操作(一)
特征选择技术总结
- 原文地址:https://blog.csdn.net/m0_61133217/article/details/137966804