-
vscode 如何断点调试ros1工程
在vscode中断点调试ros1工程主要分为以下几步:
1. 第一步就是修改cmakelist.txt,到调试模式。
将CMAKE_BUILD_TYPE原来对应的代码注释掉,原来的一般都不是调试模式。加上下面一行代码,意思是设置调试模式。# 断点调试 SET(CMAKE_BUILD_TYPE "RelWithDebInfo")- 1
- 2
然后打开终端进行编译。

最后在终端中先source 当前环境,再打开vscode。

2. 首先要安装扩展:
ROS,c/c++ ,Txt Syntax,Msg Language Support,16:28ROS Package Variable,一项项安装好即可。

3. 其次生成tasks.ison文件。
快捷键ctrl+shift+P, 弹出如下界面:

选择Tasks:Configure Task,弹出如下界面,再选择使用模版创建tasks.json 文件
 点击回车就会生成对应的json文件,如下图所示:
点击回车就会生成对应的json文件,如下图所示:

4. 生成launch.json文件
点击运行和调试按钮,如图中亮色的三角图标,
 再点击创建launch.json,弹出如下界面,若不出现下面的选项,说明扩展还没有装好。
再点击创建launch.json,弹出如下界面,若不出现下面的选项,说明扩展还没有装好。

选择ROS,弹出如下界面
再选择ROS:Launch,弹出如下界面: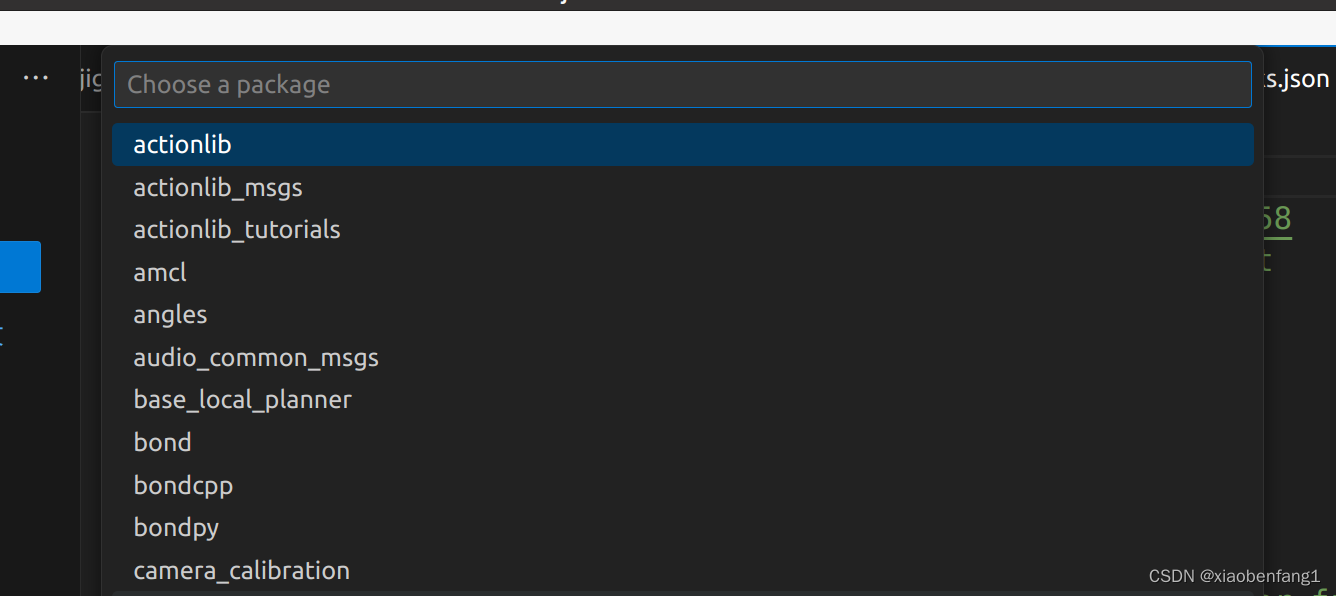 在搜索框内输入功能包名字liorf,选择liorf
在搜索框内输入功能包名字liorf,选择liorf
 弹出如下界面,选择要启动的 launch 文件,这里选择run_beidou_six.launch
弹出如下界面,选择要启动的 launch 文件,这里选择run_beidou_six.launch
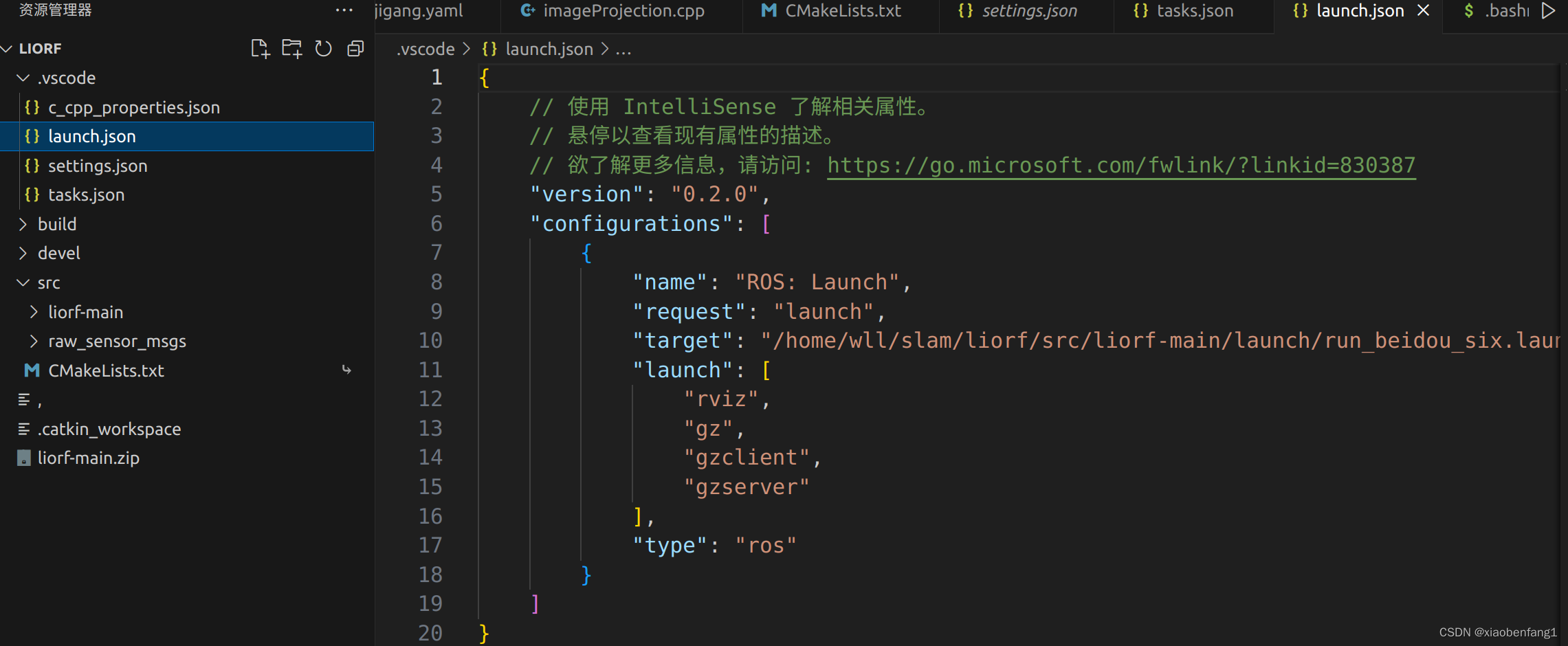
 最后就会生成对应的launch.json文件
最后就会生成对应的launch.json文件
 5.启动调试模式,点击图中绿色的按钮
5.启动调试模式,点击图中绿色的按钮
 弹出如下界面
弹出如下界面
 调试控制台这里有信息输出,并且在界面顶端出现单步调试的按钮,接下来播放数据包就可以进行单步调试:发现顶端的调试按钮变亮,即为可调试状态,可以再添加断点进行调试。
调试控制台这里有信息输出,并且在界面顶端出现单步调试的按钮,接下来播放数据包就可以进行单步调试:发现顶端的调试按钮变亮,即为可调试状态,可以再添加断点进行调试。
 注意:若电脑中同时安装了ros1和ros2要把 .bashrc中的注释掉。
注意:若电脑中同时安装了ros1和ros2要把 .bashrc中的注释掉。# >>> fishros initialize >>> # echo "ros:galactic(1) noetic(2) ?" # read choose # case $choose in # 1) source /opt/ros/galactic/setup.bash&&export ROS_DOMAIN_ID=30;; # 2) source /opt/ros/noetic/setup.bash;; # esac # <<< fishros initialize <<<- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
-
相关阅读:
夏日水果茶饮店如何引流?这四款饮品必学
数学基础(三)PCA原理与推导
如何计算连续区间,字母分段
Magento_CentOS安装
关于图灵测试和中文屋Chinese room的理解
计算机毕业设计Java江西婺源旅游文化推广系统(源码+系统+mysql数据库+lw文档)
node-sass离线安装
callee和caller
CADD课程学习(1)-- 药物设计基础知识
大数据从入门到精通(超详细版)之Hive案例,指标统计, Sql语句的编写
- 原文地址:https://blog.csdn.net/xiaobenfang1/article/details/138078680