-
嵌入式系统应用-拓展-GPRS或者北斗芯片定位
1 定位系统选择
因为项目需要,需要设计一个定位系统。可以自由切换北斗和GRPS的全球定位系统。
综合对比之下,选择了中芯微的GM36的全球定位芯片。可以支持北斗和GPRS的定位系统。
2 电路设计
GM36采用了串口通讯,可以通过UART来获取数据。因为模块是每次主动发送的。 主控机只需要每次获取到合适的数据来解析就好。
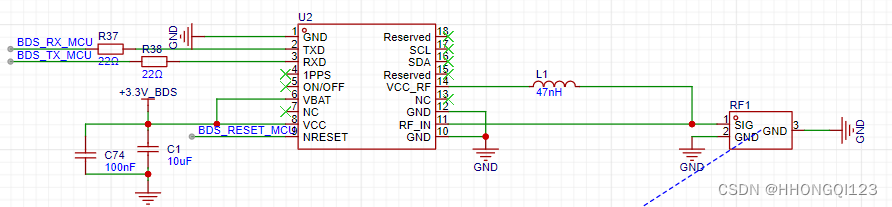
这里需要注意的情况是:天线采用50ohm的阻抗进行匹配。
所以尽量4层板子设计方案。3 通讯协议分析
芯片采用两种协议:
1、文本协议,包括 NMEA 标准协议
2、CASBIN 二进制协议3.1 NMEA 标准协议格式
NMEA(National Marine Electronics Association)是一个制定电子设备通信协议标准的组织,其最为知名的标准是NMEA 0183协议,用于海上和陆上的电子设备间的通信,特别是用于GPS设备和导航系统。下面是NMEA 0183标准协议的基本格式:
- 数据格式:NMEA 0183协议的数据以ASCII字符形式传输,每条数据以"$“符号开头,以换行符”\r\n"结束。
- 数据字段:每条NMEA 0183数据包含多个字段,字段之间使用逗号",“进行分隔。字段的数量和含义取决于具体的NMEA消息类型,常见的字段包括:消息起始符号:”$" 消息类型标识符:标识消息类型的三个字母,比如"GGA"表示定位数据。
- 数据字段:包含有关位置、时间、速度等信息的数据字段,字段顺序和含义由具体的消息类型确定 校验和:两个十六进制字符,表示校验和的结果
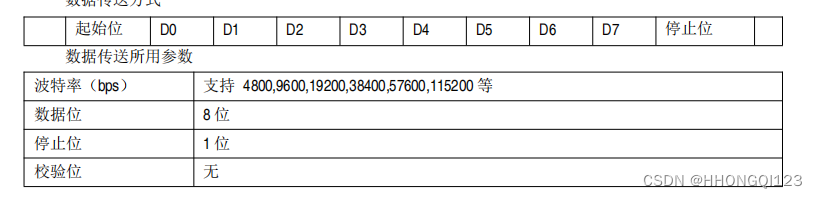
波特率一般默认采用9600譬如:
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47- "$"是消息起始符号
- "GPGGA"是消息类型标识符,表示该数据是GGA消息(定位数据)
- "123519"表示UTC时间
- "4807.038,N"表示纬度(48度07.038分北纬)
- "01131.000,E"表示经度(011度31.000分东经)
- 其他字段包括定位质量指示符、卫星数量、HDOP值、海拔高度、大地水准面高度等 "*47"是校验和。
校验和计算:校验和是通过对消息中" " 与 " ∗ " 之间所有字符的异或运算得出的。例如,上述示例数据中的校验和 " ∗ 47 " 表示队 " "与"*"之间所有字符的异或运算得出的。例如,上述示例数据中的校验和"*47"表示队" "与"∗"之间所有字符的异或运算得出的。例如,上述示例数据中的校验和"∗47"表示队"GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,"
进行异或运算得到结果"47"3.2 RMC- 定位系统信息
系统会自动上报各种定位系统信息,如果知识为了定位。可以采用RMC的定位系统信息
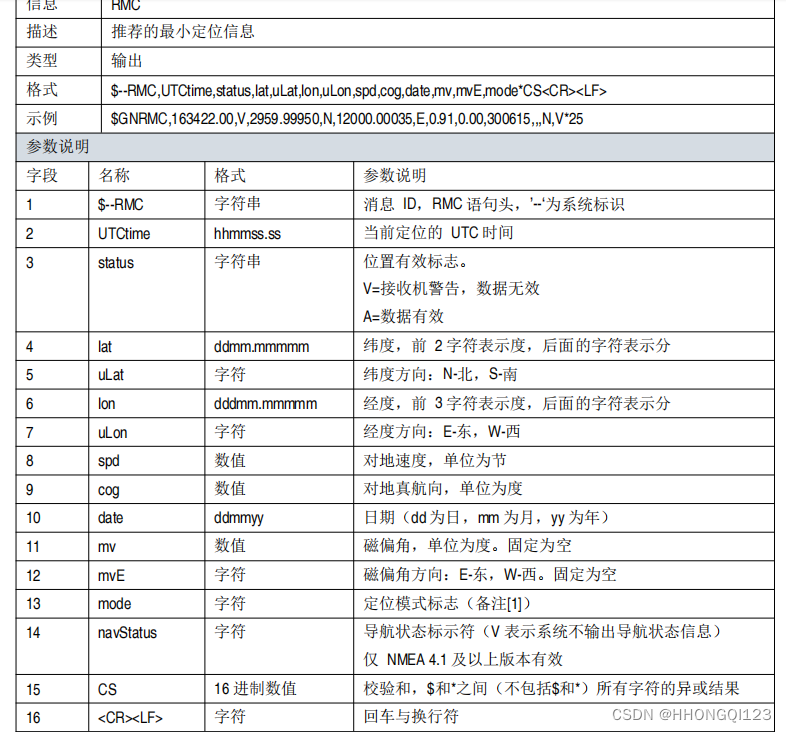
出了获取精度、维度和时间戳信息,基本够用了。
数据是否正确,可以判断staus的值,如果值是’A’, 可以认为数据获取正确。定位系统要定位准确,要在空旷的地方,移动一下,才能解析到可靠的准确定位。
3.3 中断接收代码
void USART1_IRQHandler(void) { rt_interrupt_enter(); u8 Res; if(RESET != usart_interrupt_flag_get(USART1, USART_INT_FLAG_RBNE)) { Res=usart_data_receive(USART1); if(Res == '$') // 检测起始字符 { cnt = 0; } else { rec_buff[cnt++] = Res; if(rec_buff[0] == '$' && rec_buff[4] == 'M' && rec_buff[5] == 'C') //确定是否收到"GPRMC/GNRMC"这一帧数据 { if(Res == '\n') // 停止接收,发送信号量,通知线程可以处理数据 { usart_disable(USART1); // 关闭传输 rt_sem_release(&beidou_sem); // 释放信号量,开始处理数据 } } } usart_interrupt_flag_clear(USART1,USART_INT_FLAG_RBNE); // 清除标志位 } // else if(RESET != usart_interrupt_flag_get(USART2, USART_INT_FLAG_IDLE)) // { // usart_data_receive(USART2); // rec_buff[cnt++]='\0'; rt_sem_release(&tm18_sem); // } else __nop(); rt_interrupt_leave(); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
-
相关阅读:
Java—— 中的 Comparable、Clonable
Alibaba Fastjson的基本使用
SQLServer下载安装详细图解
物联网毕设 -- ESP32-CAN加摄像头传输图像,STM32驱动小车自动避障图像采集并显示到Android端
四、Nginx配置文件-负载均衡
STL浅析
Mysql_Note9
java VR全景商城免费搭建 saas商城 b2b2c商城 o2o商城 积分商城 秒杀商城 拼团商城 分销商城 短视频商城
java集合图谱
LeetCode 面试题 05.03. 翻转数位
- 原文地址:https://blog.csdn.net/huanghongqi11/article/details/138181919