-
T31开发笔记: 移动侦测
若该文为原创文章,转载请注明原文出处。
最近在测试创安源IPC时发现摄像头的视频流有移动侦测功能 ,拆解后发现使用的是T31,刚好手头上有淘宝买50多点的T31摄像头,就自己现在了个简易DEMO测试一下。
一、硬件和开发环境
1、硬件:T31X+SC5235
2、开发环境: ubuntu16.04-64bit
3、编译器:mips-gcc540-glibc222-32bit-r3.3.0.tar.gz
注:板子和和WIFI模块是某淘上淘的,使用的是RTL8188,使用的是USB接口,uboot和内核是自己裁剪移植的,内核默认自带WIFI驱动,所以不用移植可以直接使用。
二、移动侦测原理
以前有使用过海思hi3516ev200的移动侦测功能,感觉原理差不多。
运行的demo是sample-Encoder-h264-IVS-base-move.c
根据DEMO,移动侦测使用的是子流640*360,以区域方式来检测是否有移动,有移动输出1,
即把640*360分成45*80个8*8的区域
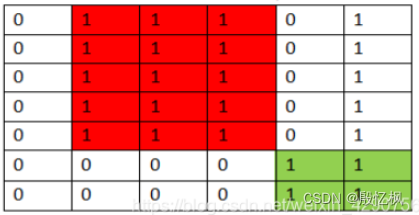
由此知道了移动的大概位置。而我试验的目的是通过这些区域算坐标并画框显示在界面上。
三、使用步骤
IMP 通过IVS的通用接口API调用实例化的IMPIVSInterface将智能化分析算法嵌入到SDK中来分析SDK中的frame图像。
IMPIVSInterface为通用算法接口,具体算法通过实现此接口并将其传给IMP IVS达到在SDK运行具体算法的目的。
一个channel有且仅为单个算法示例的载体,必须将具体实现的算法接口传给具体的channel才能在SDK中运行算法。
IMPIVSInterface 成员 param 为成员函数 init 的参数。
IMP_IVS 会在传给成员函数 ProcessAsync 参数的 frame 时对其进行外部加锁, ProcessAsync 必须在使用完 frame 后调用 IMP_IVS_ReleaseData 释放 frame,以免死锁。
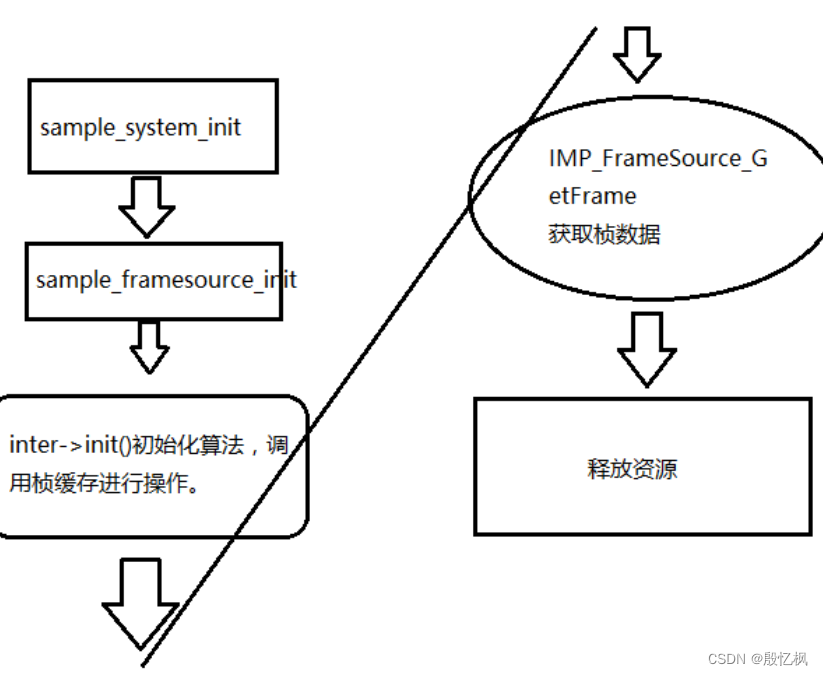
除上述通过绑定在数据流中的 IMP IVS 实现算法调用之外,还提供一种非绑定的方式实现算法 调 用 , 即 获 取 framesouce channel 的 frame 图 像 , 直 接 调 用 IMPIVSInterface 的成员函数实现算法处理。
大部分情况下,我们使用的都是不绑定的方式进行移动侦测算法的获取的。
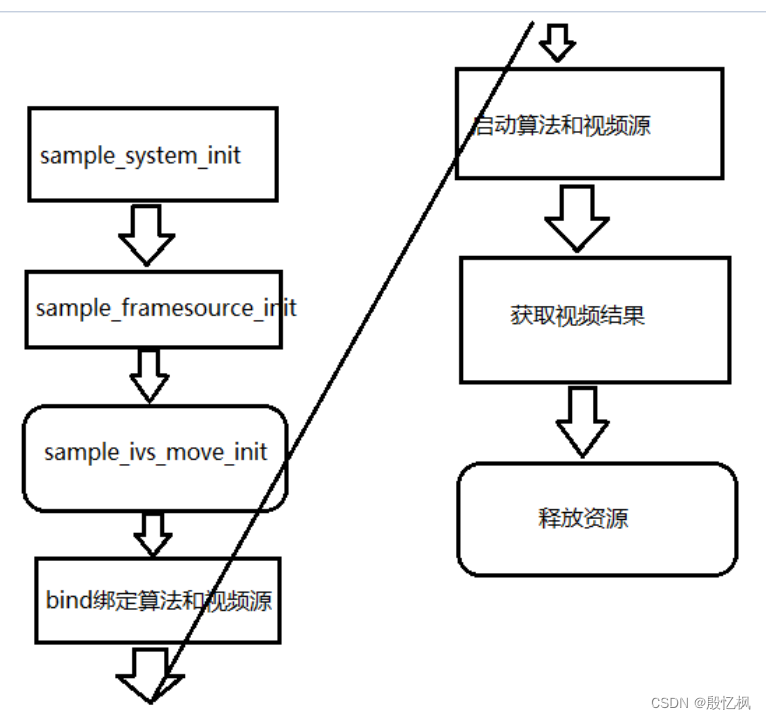
绑定模式的算法使用方法:
非绑定模式调用IVS平台
具体的API参考API手册。
四、代码说明
sample-Encoder-h264-IVS-base-move例程已经输出了参数,结构体如下:
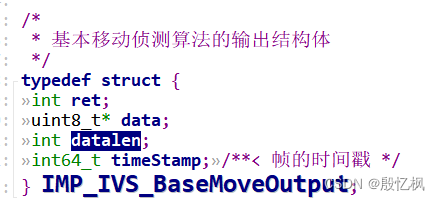
其他数据data表示意思个人不理解,没有变化为0,有变化不为0,有人知道望告知。
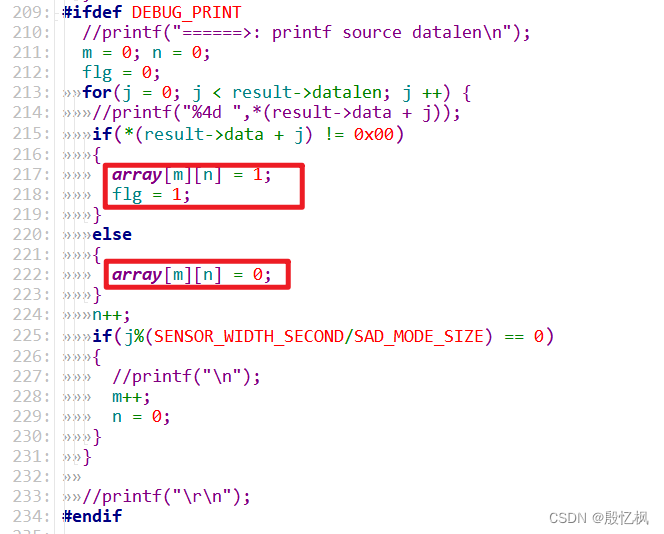
输出总的数据是3600即80*45通过下面代码他数据重新整理成一个多维数组。
把检测到的值不为0,就表示1方式的方式存在arary[45][80]的数组里。
接下来通过算法,自己出为1的区域,
计算边界值
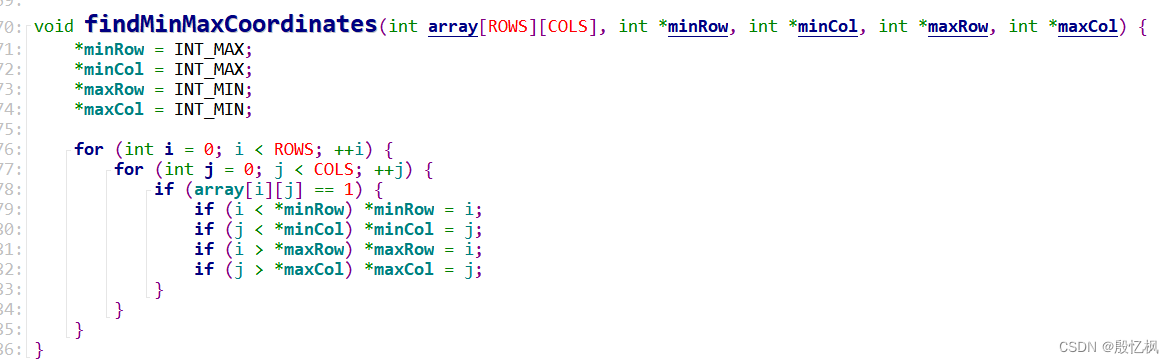
这个函数的作用是求一个10x10数组中值为1的元素的最大和最小行和列坐标
通过此算法,即可获取到对应的区域
附完整的测试代码:
- #include <stdio.h>
- #include <limits.h> // For INT_MAX and INT_MIN
- #define ROWS 10
- #define COLS 10
- void findMinMaxCoordinates(int array[ROWS][COLS], int *minRow, int *minCol, int *maxRow, int *maxCol) {
- *minRow = INT_MAX;
- *minCol = INT_MAX;
- *maxRow = INT_MIN;
- *maxCol = INT_MIN;
- for (int i = 0; i < ROWS; ++i) {
- for (int j = 0; j < COLS; ++j) {
- if (array[i][j] == 1) {
- if (i < *minRow) *minRow = i;
- if (j < *minCol) *minCol = j;
- if (i > *maxRow) *maxRow = i;
- if (j > *maxCol) *maxCol = j;
- }
- }
- }
- }
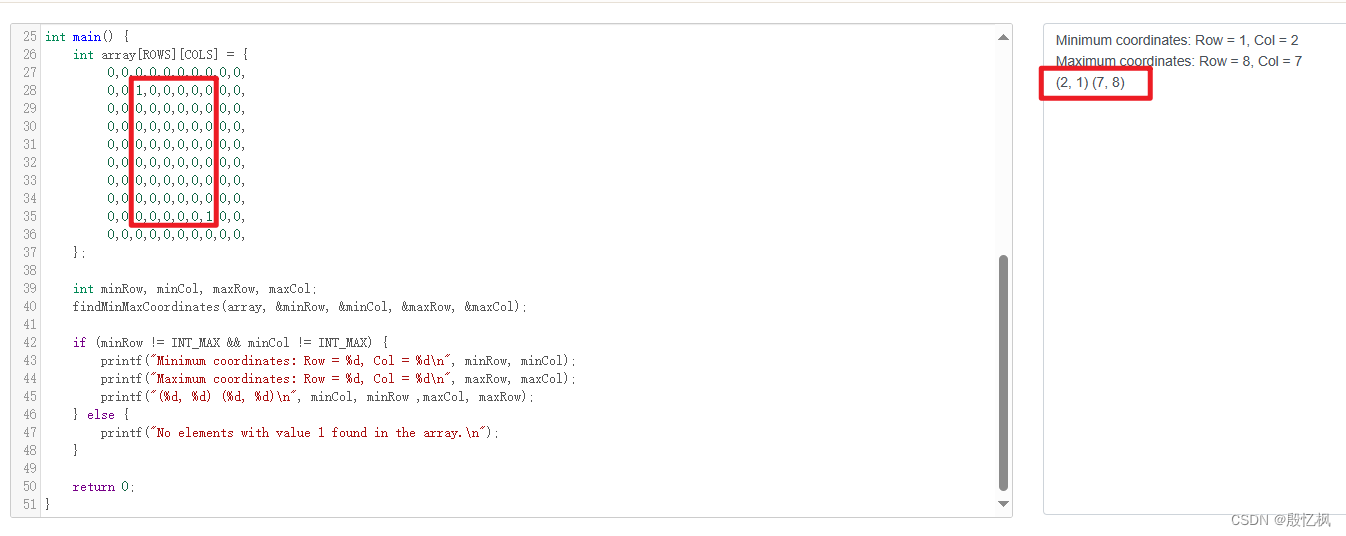
- int main() {
- int array[ROWS][COLS] = {
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,1,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- 0,0,0,0,0,0,0,1,0,0,
- 0,0,0,0,0,0,0,0,0,0,
- };
- int minRow, minCol, maxRow, maxCol;
- findMinMaxCoordinates(array, &minRow, &minCol, &maxRow, &maxCol);
- if (minRow != INT_MAX && minCol != INT_MAX) {
- printf("Minimum coordinates: Row = %d, Col = %d\n", minRow, minCol);
- printf("Maximum coordinates: Row = %d, Col = %d\n", maxRow, maxCol);
- printf("(%d, %d) (%d, %d)\n", minCol, minRow ,maxCol, maxRow);
- } else {
- printf("No elements with value 1 found in the array.\n");
- }
- return 0;
- }
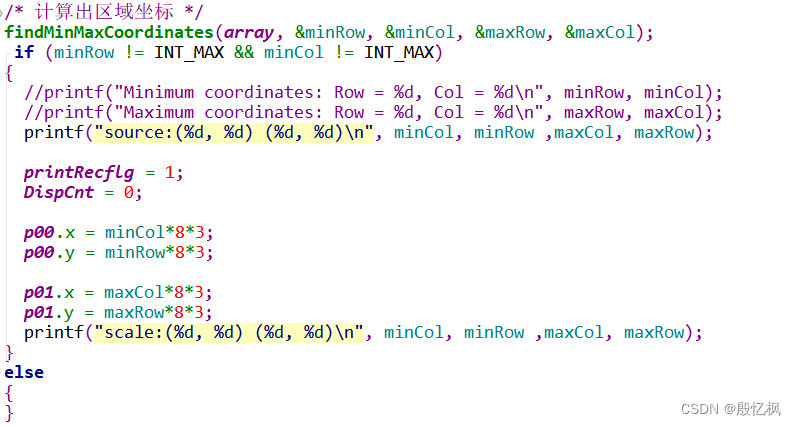
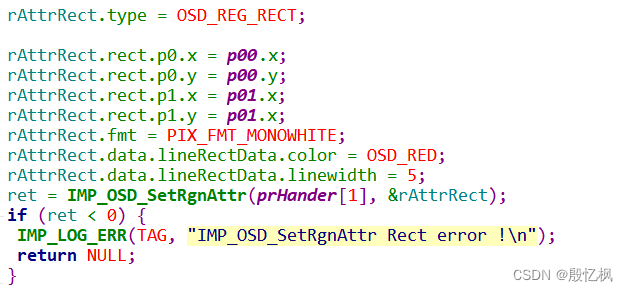
把获取的坐标存到p00和p01结构体内,
p00.x = minCol*8*3;
p00.y = minRow*8*3;
p01.x = maxCol*8*3;
p01.y = maxRow*8*3;说明乘于8是因为roi区域是8*8, 乘于3是因为我在主码流1920*1080上叠加了OSD画框显示功能 。
所以坐标放大3倍 。
OSD画框参考的是sample_OSD.c例程。在update_thread更新线程里添加了显示框的坐标点。
五、测试结果

输出感觉有点不灵敏,具体参数还有待调试。
此方式是个人想到的一种方法,有其他方式望互相讨论。
如有侵权,或需要完整代码,请及时联系博主。
-
相关阅读:
高数_第3章重积__二重积分的2个结论
【机器学习】逻辑回归logit与softmax
ASP.NET Core 6框架揭秘实例演示[21]:如何承载你的后台服务
基于py路由器转发内容
PTA--1087 All Roads Lead to Rome(最短路计数+输出路径)
小程序源码:纯头像微信小程序源码下载,多分类头像自动采集无需服务器和域名-多玩法安装简单
可以用爱因斯坦求和替代的那些矩阵运算
Java进阶过程
[一篇读懂]C语言二讲:运算符与表达式
面试算法26:重排链表
- 原文地址:https://blog.csdn.net/weixin_38807927/article/details/137968231
