-
STM32 学习8 USART串口通讯与printf重定向
STM32 学习8 USART串口通讯
- 一、串口通信介绍
- 1. USART介绍
- 2. UART介绍
- 3. STM32 F103ZET6串口资源
- 4. STM32 USART作用
- 5. STM32 USART框图
- 6. 寄存器
- USART_SR(Status Register,状态寄存器):
- USART_DR(Data Register,数据寄存器):
- USART_BRR(Baud Rate Register,波特率寄存器):
- USART_CR1(Control Register 1,控制寄存器1):
- USART_CR2(Control Register 2,控制寄存器2):
- USART_CR3(Control Register 3,控制寄存器3):
- USART_GTPR(Guard Time and Prescaler Register,守护时间和预分频器寄存器):
- USART_IT(Interrupt Register,中断寄存器):
- 7. 中断请求
- 二、开发板RS-232硬件连接
- 三、串口通信的配置步骤
- 四、代码实现
- 五、printf重定向
一、串口通信介绍
STM32 F103ZET6包含多个UART、USART串口。
1. USART介绍
USART,全称:Universal Synchronous/Asynchronous Receiver/Transmitter,是通用同步/异步串行接收/发送器,主要特点有:
- 同步和异步通信
- 全双工通信
- 支持硬件和软件流控制机制
2. UART介绍
UART,全称:Universal Asynchronous Receiver/Transmitter,是通用异步收发器,在USART功能的基础上,裁剪掉了同步通信功能,其主要特点:
- 异步通信
- 全双工通信
- 无需外部时钟信号
3. STM32 F103ZET6串口资源
STM32 F103ZET6芯片,有5个USART接口,数据手册可在官网查询:
https://www.st.com/zh/microcontrollers-microprocessors/stm32f103.html根据手册的描述:
STM32F103xC、STM32F103xD和STM32F103xE性能型系列集成了:
- 三个通用同步/异步串行收发器(USART1、USART2和USART3)
- 两个通用异步串行收发器(UART4和UART5)。
这五个接口提供了异步通信、IrDA SIR ENDEC支持、多处理器通信模式、单线半双工通信模式,并具有LIN主/从能力。USART1接口能够以高达4.5 Mbit/s的速度进行通信。其他可用的接口的通信速度为最高2.25 Mbit/s。
USART1、USART2和USART3还提供CTS和RTS信号的硬件管理、智能卡模式(符合ISO 7816标准)以及类SPI通信功能。
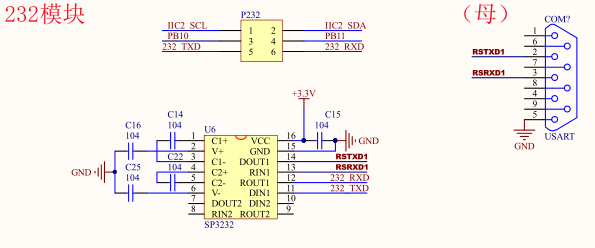
除了UART5外,所有接口都可以由DMA控制器服务。开发板原理图:
4. STM32 USART作用
USART 一个常见应用是将printf 函数通过串口输出,方便程序调试。
另外, USART还支持 LIN(域互连网络)、智能卡协议与红外IrDA协议 SIR ENDEC规范、调制解调器操作(CTS/RTS)、和DMA功能。5. STM32 USART框图
在《stm3210x参考手册.pdf》P309可以看到STM32的USART框图:
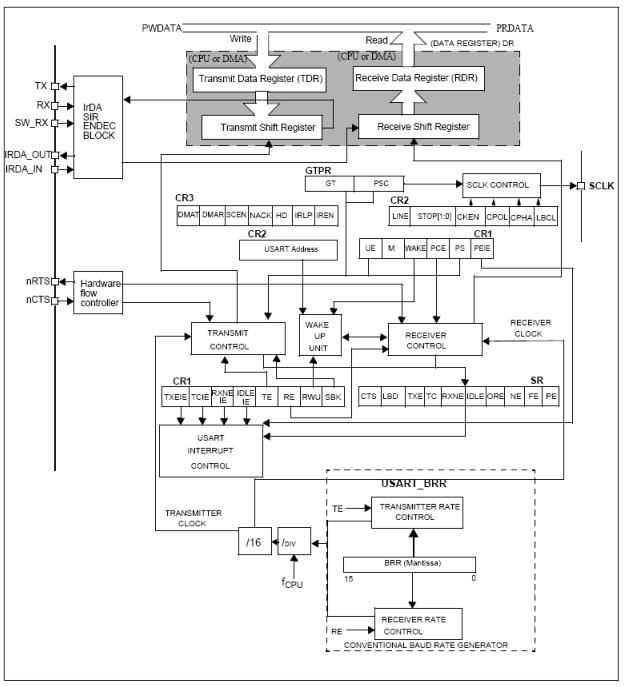
引脚说明
- TX:发送端口;
- RX:接收端口;
- nRTS、nCTS:硬件流控,不常使用,只针对异步串口通讯端口;
- SCLK:时钟,只针对异步串口通讯端口;
- IRDA_OUT、IRDA_IN:内部引脚。
6. 寄存器
这里简单列出常用的USART寄存器,详细使用方法可以参考《stm32中文参考手册.pdf》。
USART_SR(Status Register,状态寄存器):
用于存储USART的状态信息,包括发送完成、接收缓冲区非空、校验错误等。
USART_DR(Data Register,数据寄存器):
用于存储发送和接收的数据。写入此寄存器可以启动数据发送,读取此寄存器可以获取接收到的数据。
USART_BRR(Baud Rate Register,波特率寄存器):
用于设置USART的波特率,通常需要根据系统时钟和所需的波特率进行配置。
USART_CR1(Control Register 1,控制寄存器1):
用于配置USART的工作模式、数据格式、中断使能等。
USART_CR2(Control Register 2,控制寄存器2):
用于配置USART的硬件流控、时钟极性等特性。
USART_CR3(Control Register 3,控制寄存器3):
用于配置USART的其他特性,如DMA使能、多主机模式等。
USART_GTPR(Guard Time and Prescaler Register,守护时间和预分频器寄存器):
用于配置USART的守护时间和时钟预分频器,通常与同步通信相关。
USART_IT(Interrupt Register,中断寄存器):
用于配置USART的中断使能和中断标志位。
7. 中断请求
在《STM32中文参考手册》中,中断请求表:

二、开发板RS-232硬件连接
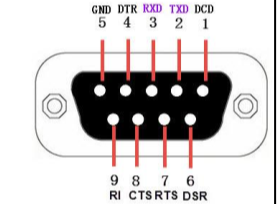
在普中-F1开发板上,提供了 RS-232 母头,其线序:
可以使用一根 RS-232转TTL转USB的连接线,连接USB接电脑,电脑上使用串口调试工具进行开发实验。
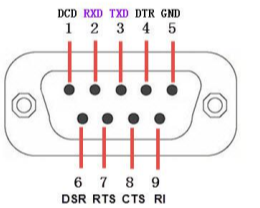
RS-232公头线序:
三、串口通信的配置步骤
配置USART的步骤如下:
1. 时钟使能:
首先需要使能USART所使用的时钟,确保其正常工作。USART挂接的系统总线:
- USART1: APB2时钟总线
- USART2~5:APB1时钟总线
代码示例:
// 使能 GPIOA 时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); // 使能 USART1 时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);- 1
- 2
- 3
- 4
2. GPIO配置:
配置相关的GPIO引脚,将其设置为USART的TX(发送)和RX(接收)功能。此外,还需要配置引脚的模式(输入/输出)、速率、上拉/下拉等参数。
代码示例:GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; // 接收设置输入浮空模式 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;- 1
- 2
- 3
3. USART参数配置:
配置USART的工作模式、波特率、数据位、停止位、校验位等参数。这些参数需要根据具体的通信需求进行设置。
#include "stm32f10x.h" void USART1_UART_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; USART_InitTypeDef USART_InitStruct; // 使能串口1时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 串口1 GPIO初始化 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA时钟 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; // TX引脚 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出模式 GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; // GPIO速度为50MHz GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10; // RX引脚 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 浮空输入模式 GPIO_Init(GPIOA, &GPIO_InitStruct); // 串口1参数配置 USART_InitStruct.USART_BaudRate = 115200; // 波特率为115200 USART_InitStruct.USART_WordLength = USART_WordLength_8b; // 数据位长度为8位 USART_InitStruct.USART_StopBits = USART_StopBits_1; // 停止位为1位 USART_InitStruct.USART_Parity = USART_Parity_No; // 无校验位 USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控制 USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 支持接收和发送 USART_Init(USART1, &USART_InitStruct); // 使能USART1模块 USART_Cmd(USART1, ENABLE); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
4. 使能USART:
最后需要使能USART模块,开始其正常工作。这涉及到设置相应的控制寄存器来启动USART的发送和接收功能。
void USART_Cmd(USAR_TypeDef* USARTx, FunctionalState NewState); USART_Cmd(USART1, ENABLE);- 1
- 2
5. 设置串口中断类型并使能
本章使用使用到串口中断,关于中断具体概念和使用会在后续章节介绍。
// 设置中断类型 void USART_ITConfig(USART_TypeDef * USARTx,uint16_t USART_IT,FunctionalState NewState); // 串口1接收使能 USART_ITConfig(USART1, USART_IT_RXNE,ENABLE); // 发送使能 USART_ITConfig(USART1, USART_IT_TC,ENABLE);- 1
- 2
- 3
- 4
- 5
- 6
6. 设置串口中断优先级、使能串口中断通道
NVIC_Init()- 1
7. 串口中断函数
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT); if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET){ // 接收USART1 中断的处理 } void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);- 1
- 2
- 3
- 4
- 5
四、代码实现
下面代码实现的功能是:
通过电脑串口给开发板的USART3发送数据0-9的数据,开发板的数码管显示对应的数值,并且回复同样的内容给开发板。1. 用 uart 库
2. usart_utils.c
#include "usart_utils.h" #include "stm32f10x.h" #include "led_utils.h" // 初始化USART3 void USART3_Init(u32 bound) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; // 使能USART3和GPIOB时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 配置USART3的GPIO引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // TX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; // RX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOB, &GPIO_InitStructure); // 配置USART3参数 USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART3, &USART_InitStructure); // 使能USART3 USART_Cmd(USART3, ENABLE); USART_ClearFlag(USART3, USART_FLAG_TC); USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } // USART3中断服务函数 void USART3_IRQHandler(void) { if (USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) { // 读取接收到的数据 u8 data = USART_ReceiveData(USART3); if(data<=9){ // 收到什么,就发送什么 USART3_SendData(data); // led也显示对应的值 led_lightn(data); } // 清除接收中断标志位 USART_ClearITPendingBit(USART3, USART_IT_RXNE); } } // 发送函数 void USART3_SendData(u8 data) { USART_SendData(USART3, data); while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
3. usart_utils.h
#ifndef __USART_UTILS_H__ #define __USART_UTILS_H__ #include "stm32f10x.h" void USART3_Init(u32 bound); void USART3_IRQHandler(void); // 发送函数 void USART3_SendData(u8 data); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
4. main函数
#include "gpio_utils.h" #include "rcc_utils.h" #include "stm32f10x.h" #include "sys_tick_utils.h" #include "led_utils.h" #include "key_utils.h" #include "usart_utils.h" // 主函数 int main(void) { GPIO_Configuration(); // 调用GPIO配置函数 sys_tick_init(72); led_all_off(); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); USART3_Init(9600); while (1) // 无限循环 { delay_ms(20); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
五、printf重定向
1. 实现方式
通过printf的重定向 ,可以实现在打印printf内容时,通过串口将内容输出来,以方便调试。
要在 STM32 上实现
printf的重定向,通常需要重写fputc函数,以便将输出重定向到你所选择的串口。下面是一个基本的示例:#include#include "usart_utils.h" // 重定向 fputc 函数,将输出重定向到 USART3 int fputc(int ch, FILE *f) { USART_SendData(USART3, (uint8_t)ch); while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET); return ch; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
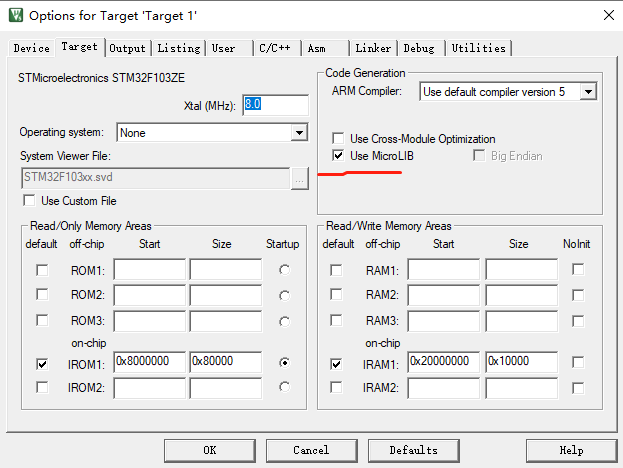
在这个示例中,
fputc函数会重定向到 USART3,并且通过调用USART_SendData函数发送一个字节到 USART3,然后等待发送完成。需要注意的是,使用这个功能时,要钩选microLIB功能。 钩选microLIB会增加程序的体积,需要权衡利弊。
2. 调用
示例代码里,使用
printf("HelloWorld");,就可以在串口看到输出的字符串。本文代码开源在:
https://gitee.com/xundh/stm32_arm_learn -
相关阅读:
必背积分表
HTML+CSS网页设计期末课程大作业 【茶叶文化网站设计题材】web前端开发技术 web课程设计 网页规划与设计
27.【C/C++ 最全vector数组的用法 (详解)】
浅谈智能型电动机控制器在斯里兰卡电厂中的应用
44LVS负载均衡群集-NAT
亚马逊刷单测评的正确方法是什么样的?
openssl学习——消息认证码原理
四、Ribbon负载均衡
Spring的注解开发-注解原理解析-xml方式/注解方式组件扫描
基于C++的人脸过渡项目
- 原文地址:https://blog.csdn.net/xundh/article/details/136162244
