-
【系列教程】ChatGPT+ROS:打造智能无人机自主飞行的下一代解决方案✈️【一】将chatgpt集成到ROS中
ChatGPT+ROS:打造智能无人机自主飞行的下一代解决方案【一】将chatgpt集成到ROS中🤖✈️
【ROS版本Noetic】
本喵将带来系列教程—基于Chatgpt和ROS的自主无人机~
大概国内全网唯一教程~
小无人机镇楼~

目录
- 引言 🎉
- ROS简介 🛠️
- ChatGPT概述 💡
- 集成ChatGPT到ROS的步骤 🚀
- 编码实践 🧑💻
引言 🎉
欢迎阅读我们的系列文章,在这一系列中,我们将探索如何将ChatGPT集成到机器人操作系统(ROS)中,以打造下一代智能无人机。本篇将为您介绍项目的动机、背景以及我们希望达成的目标。
ROS简介 🛠️
ROS的基本组件 🧩
ROS(Robot Operating System)是一个灵活的框架,用于编写机器人软件。它提供了一套工具和库,帮助开发者创建复杂且可靠的机器人行为。在这一节中,我们将介绍ROS的关键组件,包括节点、话题、服务等。
为何选用ROS ❓
对于打造复杂的自主系统,如无人机,ROS提供了易于使用、可扩展且强大的工具集。我们将讨论ROS对于本项目的具体优势。
安装ROS
wget http://fishros.com/install -O fishros && . fishros- 1
一行指令解决全部问题~
选择[4]即可ChatGPT概述 💡
ChatGPT可以处理复杂的语言任务,例如指令解析、决策支持等。我们将讨论将ChatGPT应用于自主系统(如无人机)的潜力。
集成ChatGPT到ROS的步骤 🚀
环境设置与安装 ⚙️
从安装ROS和必要的依赖库开始,本节将指导您准备用于ChatGPT集成的开发环境。
pip install openai- 1
在终端运行
python -c "import openai"- 1
没有报错即可
创建ROS节点以运行ChatGPT 📦
我们将讨论如何开发一个ROS节点,用于运行ChatGPT模型,并介绍如何将其集成到ROS环境中。
运行一个基本demo(与chatgpt对话)
· main.py
from openai import OpenAI client = OpenAI( api_key="your api key here!!" ) prompt = "hello,can you help me?" chat_completion = client.chat.completions.create( messages = [ { "role":"user", "content":prompt }, ], model="gpt-3.5-turbo" ) print(chat_completion.choices[0].message.content)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
运行结果~

在国内,有时候无法正常访问Chatgpt-apikey,这时候可以用中转代理
from openai import OpenAI import httpx client = OpenAI( base_url="https://oneapi.xty.app/v1", #代理地址修改这里 api_key="api-key", #你的代理地址提供给你的Api_key http_client=httpx.Client( base_url="https://oneapi.xty.app/v1", follow_redirects=True, ), ) chat_completion = client.chat.completions.create( model="gpt-3.5-turbo", messages=[ {"role": "system", "content": "You are a helpful assistant."}, {"role": "user", "content": "Hello!"} ] ) print(chat_completion.choices[0].message.content)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
数据交换与通信 🔄
数据交换对于ROS节点之间的通信至关重要。我们将探索如何使ChatGPT节点与其他ROS节点有效地交换信息。
ROS(Robot Operating System)节点之间的数据交换主要通过话题(Topics),服务(Services),和动作(Actions)来进行。在最简单的形式中,节点可以发布或订阅话题来交换信息。下面,我将提供一个简单的ROS话题通信例子,演示如何让一个节点(我们称之为"chatgpt_node")发布信息,以及另一个节点订阅这些信息。1. 创建一个ROS包
首先,确保您已经设置好了ROS环境,并且创建了一个工作空间(如果还没有的话)。接下来,我们创建一个新的ROS包:
cd ~/catkin_ws/src # 假定您的工作空间在catkin_ws catkin_create_pkg chatgpt_ros std_msgs rospy cd .. catkin_make source devel/setup.bash- 1
- 2
- 3
- 4
- 5
这里,我们创建了一个名为
chatgpt_ros的包,依赖于std_msgs和rospy。2. 编写发布者节点
创建一个名为
chatgpt_publisher.py的文件,在您的chatgpt_ros包的src文件夹中:#!/usr/bin/env python import rospy from std_msgs.msg import String def chatgpt_publisher(): pub = rospy.Publisher('chatgpt_topic', String, queue_size=10) rospy.init_node('chatgpt_node', anonymous=True) rate = rospy.Rate(10) # 10hz while not rospy.is_shutdown(): hello_str = "Hello from ChatGPT at %s" % rospy.get_time() rospy.loginfo(hello_str) pub.publish(hello_str) rate.sleep() if __name__ == '__main__': try: chatgpt_publisher() except rospy.ROSInterruptException: pass- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
不要忘记给予执行权限:
chmod +x src/chatgpt_publisher.py- 1
3. 编写订阅者节点
在同一包的
src文件夹中创建另一个文件,命名为chatgpt_subscriber.py:#!/usr/bin/env python import rospy from std_msgs.msg import String def callback(data): rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data) def chatgpt_subscriber(): rospy.init_node('chatgpt_listener', anonymous=True) rospy.Subscriber('chatgpt_topic', String, callback) rospy.spin() if __name__ == '__main__': chatgpt_subscriber()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
同样,给予执行权限:
chmod +x src/chatgpt_subscriber.py- 1
4. 运行节点
首先,确保您的ROS环境是运行中的:
roscore- 1
在新的终端中运行发布者节点:
rosrun chatgpt_ros chatgpt_publisher.py- 1
再打开另一个终端窗口运行订阅者节点:
rosrun chatgpt_ros chatgpt_subscriber.py- 1
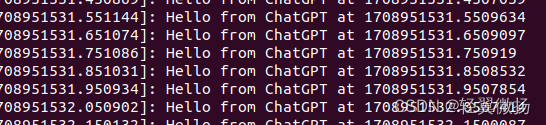
运行结果,发布者~ :
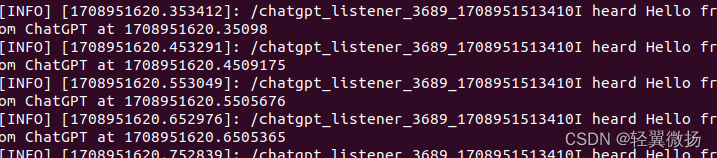
运行结果,接收者~:
编码实践 🧑💻
ROS与ChatGPT的交互示例 💬【使用代理】
在
catkin_ws/src/文件下的chatgpt_ros包的src文件中新建chatgpt_communication.py通过一个简单的实例,我们将展示ROS节点如何与ChatGPT服务端进行交互,包括发送请求和处理响应。
#!/usr/bin/env python import rospy from std_msgs.msg import String import httpx from openai import OpenAI # 初始化OpenAI客户端 client = OpenAI( base_url="https://oneapi.xty.app/v1", api_key="YOUR_API_KEY_HERE", # 请替换为您的API密钥 http_client=httpx.Client( base_url="https://oneapi.xty.app/v1", # follow_redirects=True, ), ) def user_message_callback(data): rospy.loginfo("Received from user: %s", data.data) # 向GPT发送请求,并获取回复 chat_completion = client.chat.completions.create( model="gpt-3.5-turbo", messages=[ {"role": "system", "content": "You are a helpful assistant."}, {"role": "user", "content": data.data} # 使用接收到的用户消息 ] ) # 获取GPT的回复 gpt_reply = chat_completion.choices[0].message.content rospy.loginfo("GPT Reply: %s", gpt_reply) # 发布GPT的回复 gpt_reply_pub.publish(gpt_reply) if __name__ == '__main__': try: rospy.init_node('chatgpt_ros_node', anonymous=True) # 订阅用户消息 rospy.Subscriber("user_to_gpt", String, user_message_callback) # 创建发布者,用于发布GPT的回复 gpt_reply_pub = rospy.Publisher("gpt_reply_to_user", String, queue_size=10) rospy.spin() except rospy.ROSInterruptException: pass- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
不要忘记给予执行权限:
chmod +x src/chatgpt_communication.py- 1
启动
roscore,终端输入roscore- 1
新建终端,输入
rosrun chatgpt_ros chatgpt_ros_node.py- 1
话题列表

测试话题,发送数据rostopic pub /user_to_gpt std_msgs/String "data: 'Hello'"- 1
接收数据

本喵会随时更新的~请多关注哦 -
相关阅读:
【网络技术】【Kali Linux】Wireshark嗅探(十一)以太网Ethernet协议报文捕获及分析
基于JavaSwing开发学生管理系统(登录增删改查)+论文报告 课程设计 大作业
安装opencv-python
袖口收缩包装机包装效果如何调整
发现了一些有用的 Javascript 单行代码,能快速处理一些问题
logcat: Unexpected EOF!的解决方法
Hive考试练习题(参考题解)
C选择结构程序设计
uniapp插件uViewplus的使用(涉及TS下的问题)
vue2 集成 - 超图 - SuperMap iClient3D for WebGL 及常用方法
- 原文地址:https://blog.csdn.net/m0_60999883/article/details/136307286
