-
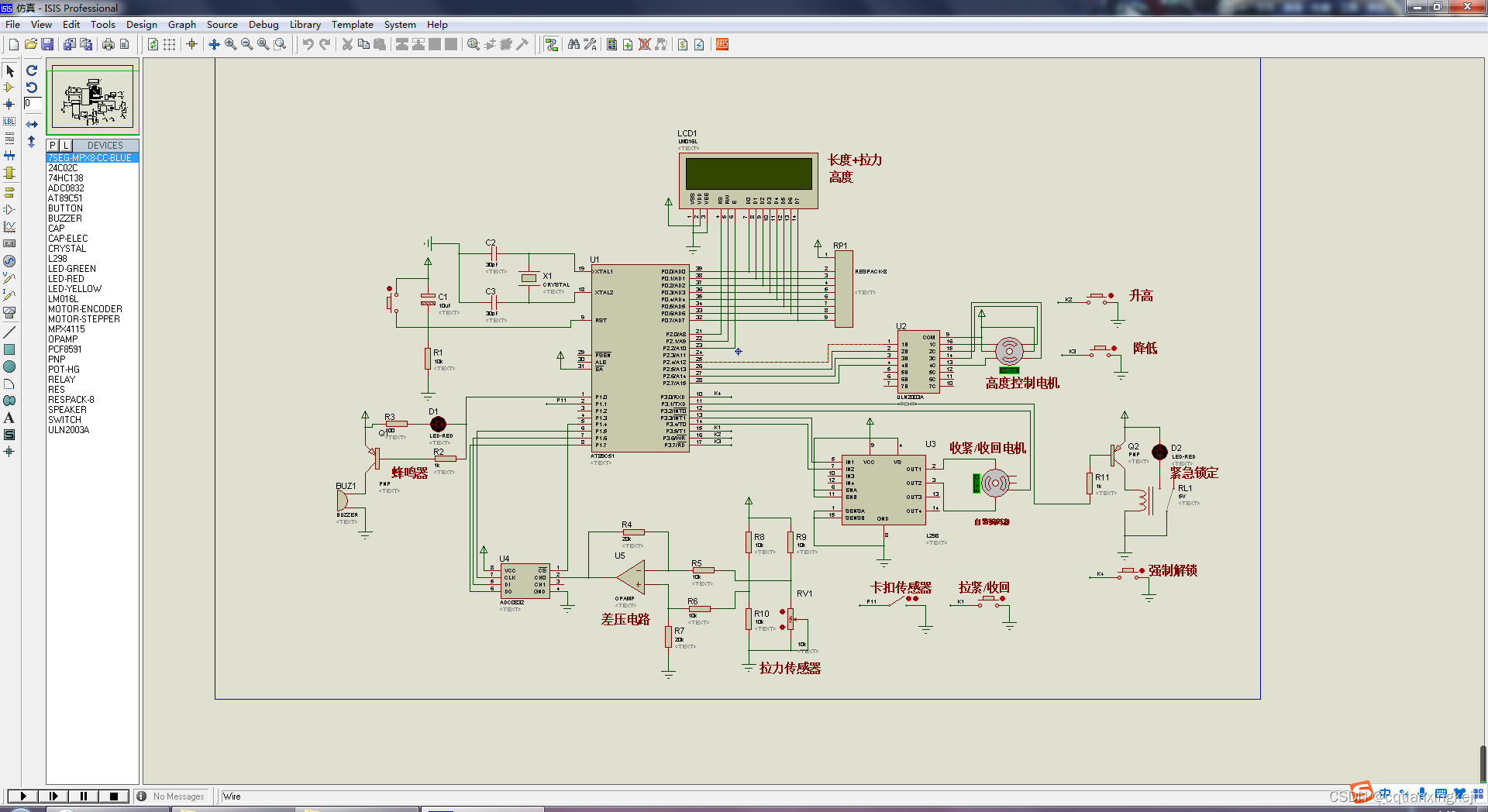
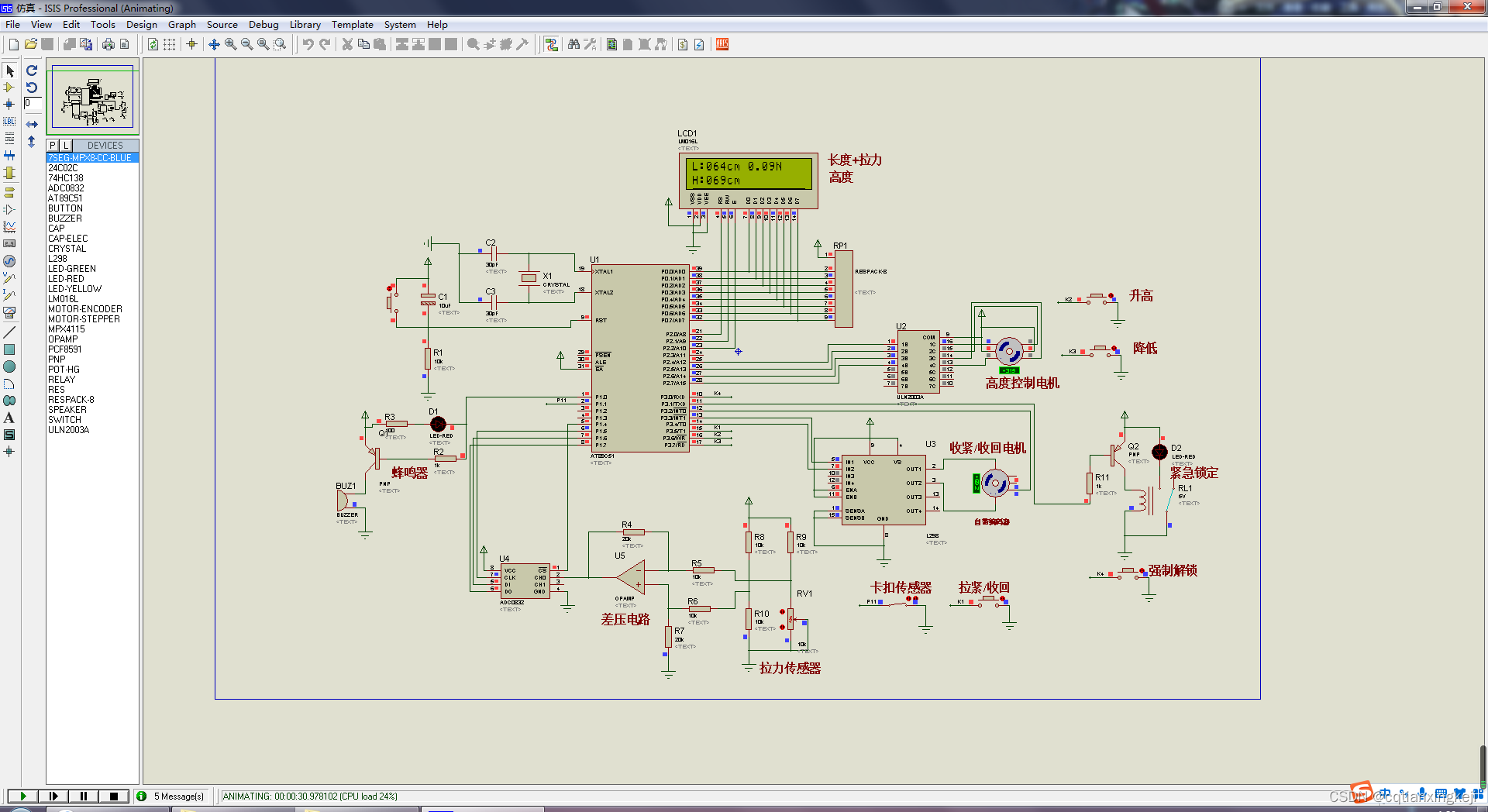
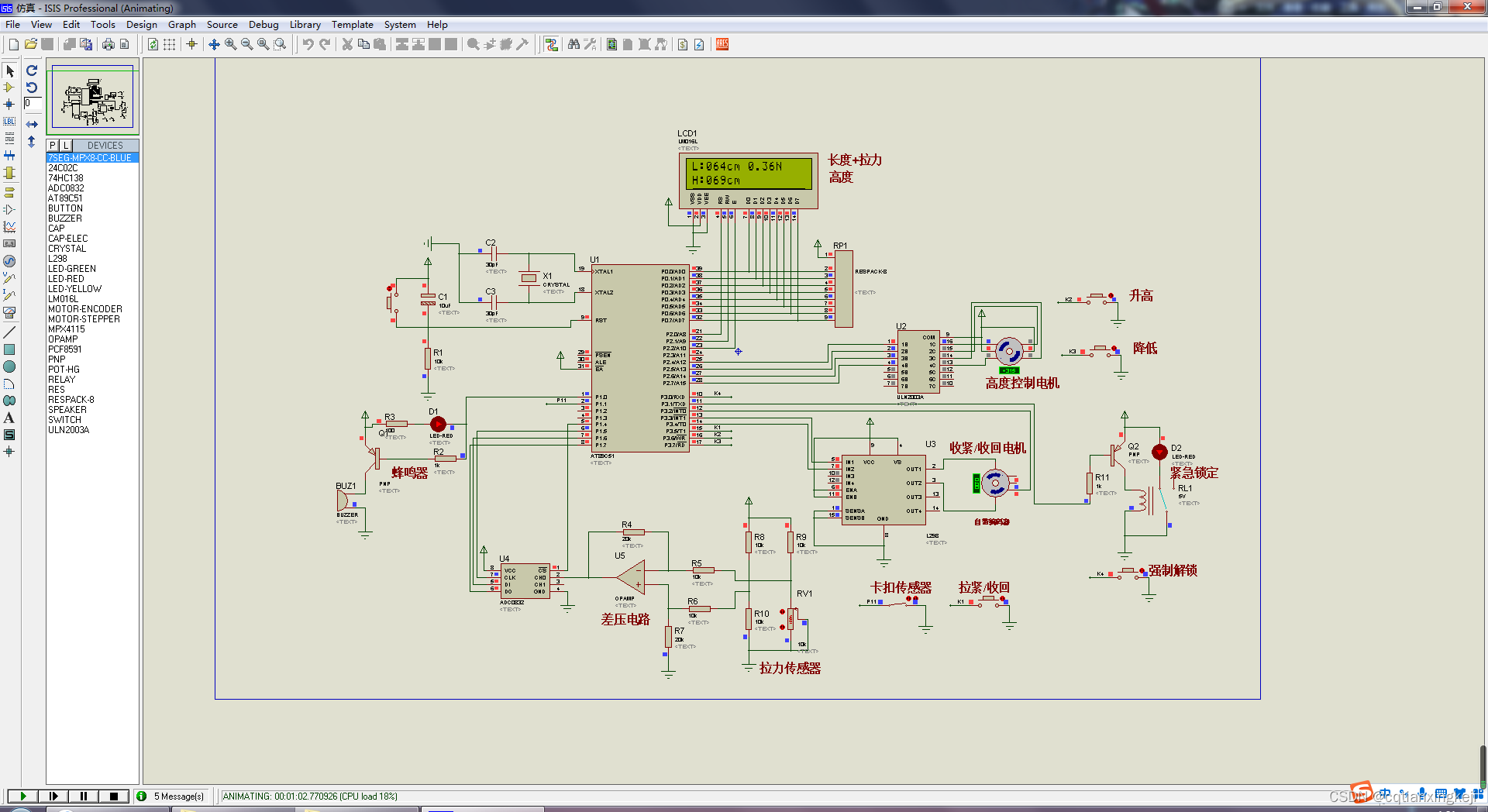
于51单片机的安全带(拉力,高度,紧急)原理图、流程图、物料清单、仿真图、源代码
基
基于51单片机的安全带(拉力,高度,紧急)
汽车安全带状态检测与控制系统研究
题目设计属性:①汽车安全带系统结构分析;②安全带长度测试系统设计;
③安全带空间测试系统设计;④计算机检测接口硬件设计;⑤状态检测与控制策略设计与实现。二、原理说明
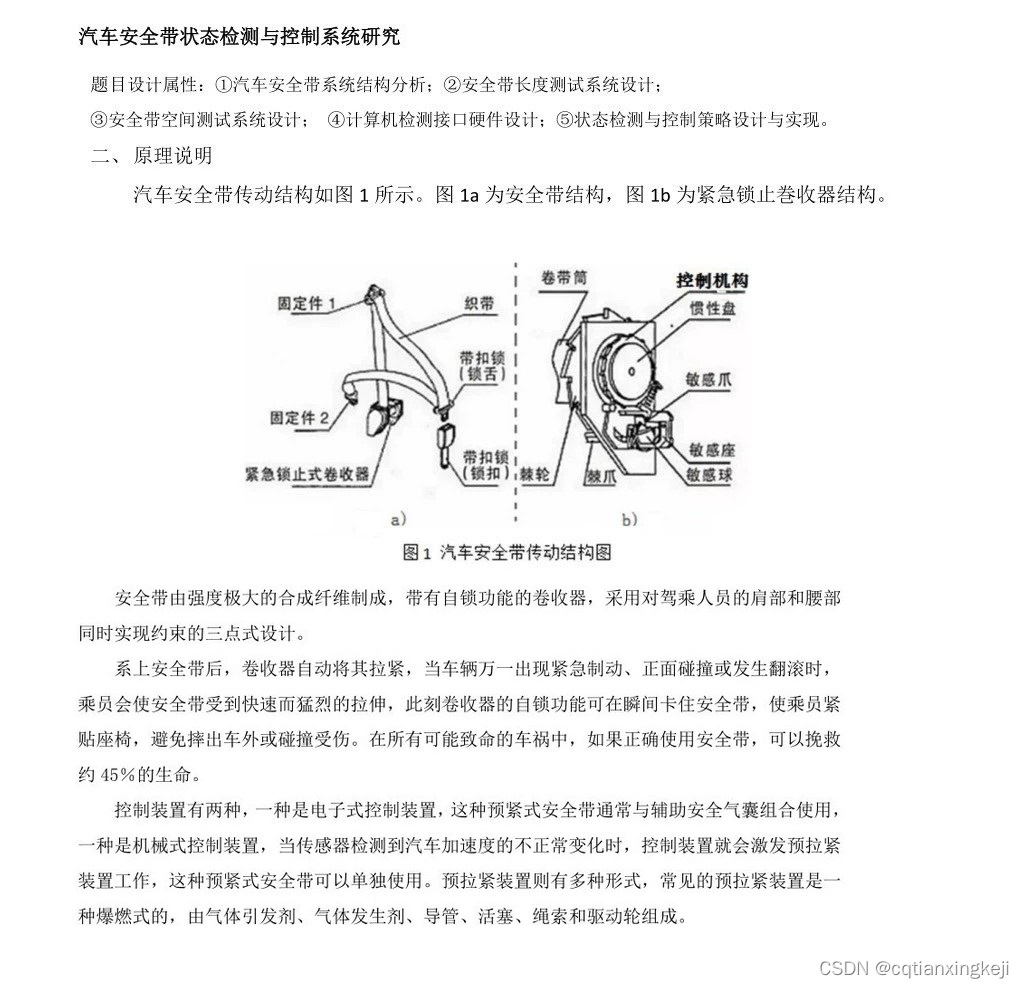
汽车安全带传动结构如图1所示。图1a为安全带结构,图1b为紧急锁止卷收器结构安全带由强度极大的合成纤维制成,带有自锁功能的卷收器,采用对驾乘人员的肩部和腰部同时实现约束的三点式设计。
系上安全带后,卷收器自动将其拉紧,当车辆万一出现紧急制动、正面碰撞或发生翻滚时,乘员会使安全带受到快速而猛烈的拉伸,此刻卷收器的自锁功能可在瞬间卡住安全带,使乘员紧贴座椅,避免摔出车外或碰撞受伤。在所有可能致命的车祸中,如果正确使用安全带,可以挽救约45%的生命。
控制装置有两种,一种是电子式控制装置,这种预紧式安全带通常与辅助安全气囊组合使用,一种是机械式控制装置,当传感器检测到汽车加速度的不正常变化时,控制装置就会激发预拉紧装置工作,这种预紧式安全带可以单独使用。预拉紧装置则有多种形式,常见的预拉紧装置是一种爆燃式的,由气体引发剂、气体发生剂、导管、活塞、绳索和驱动轮组成。




#include "reg51.h" #include "lcd1602.h" #include "ADC0832.h" #define uchar unsigned char #define uint unsigned int sbit k1=P3^5;//按钮 sbit k2=P3^6; sbit k3=P3^7; sbit k4=P3^0; sbit beep=P1^0;//蜂鸣器 sbit in=P1^1;//卡扣传感器 sbit out=P3^1;//紧急锁定 sbit motor1=P3^3;//直流电机 sbit motor2=P3^4; sbit AA=P2^4;//步进电机 sbit BB=P2^5; sbit CC=P2^6; sbit DD=P2^7; uchar time=0,sec=0;//系统变量 //步进电机,高度控制 uchar high=60;//高度 uchar motor_flag=60; uchar flag=0; //直流电机,长度控制 uint chang=500;//长度 uchar start=0;//拉紧收回开始 uchar press=0;//拉力 uchar first=0;//安全带拉出标志 uchar disp1[]="L:000cm 0.00N"; uchar disp2[]="H:000cm"; //主函数 void main() { init_1602();//初始化LCD press=ADC(1); press=0; TMOD|=0X01; TH0=0X3C; TL0=0XB0; ET0=1;//打开定时器0中断允许 //设置INT0 IT0=1;//跳变沿出发方式(下降沿) EX0=1;//打开INT0的中断允许。 EA=1;//打开总中断 TR0=1;//打开定时器 while(1) { if(!in &&(first==0))//拉出安全带 { first=1; chang=800; } if(!k1)//拉紧收回 { start=1; } //拉紧控制 if(start) { if(!in)//卡扣检测 { if((press<50)&&(chang>550))//收紧 { motor1=0; motor2=1; } else { start=0; motor1=1; motor2=1; } } else//收回控制 { if(chang>500) { motor1=0; motor2=1; } else { start=0; first=0; motor1=1; motor2=1; } } } //报警,锁紧控制 if(press>100) { out=0; beep=0; } if(!k4)//强制解锁 { out=1; beep=1; } } } //定时器中断 void Timer0() interrupt 1 { if(time<8)//0.4s time++; else { time=0; if(!k2)//升高 { if(high<100) high++; } if(!k3)//降低 { if(high>30) high--; } press=ADC(1);//测量拉力 } if(sec<10)//0.5s sec++; else { sec=0; //显示 disp1[2]=(chang/10)/100+0x30; disp1[3]=(chang/10)%100/10+0x30; disp1[4]=(chang/10)%10+0x30; disp1[8] =(press/3)/100+0x30; disp1[10]=(press/3)%100/10+0x30; disp1[11]=(press/3)%10+0x30; disp2[2]=high/100+0x30; disp2[3]=high%100/10+0x30; disp2[4]=high%10+0x30; write_string(1,0,disp1); write_string(2,0,disp2); } //高度控制 if(motor_flag- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
-
相关阅读:
【图像隐写】基于Jsteg算法实现JPEG图像信息隐藏,可设置DCT系数 嵌入率附Matlab代码
在树莓派中,Ubuntu系统下使用vim编辑器
【Java开发】 Spring 07 :Spring AOP 实践详解(通过 AOP 打印数据访问层)
Flutter 状态管理新境界:多Provider并行驱动UI
Java学习 --- 设计模式七大原则的依赖倒转原则
虚拟试穿VTNFP论文笔记
mysql 忘记 root 密码的解决办法(针对不同 mysql 版本)
C/C++ 文件读写
【智能合约】 函数动态调用-call函数和fallback函数
JVM内存模型之Volatile关键字
- 原文地址:https://blog.csdn.net/cqtianxingkeji/article/details/136224518
