报时机器人源码参考[1][2],本文重点介绍当 tracker_store 类型为 SQL 时,events 表的表结构以及数据是如何生成的。以及当 event_broker 类型为 SQL 时,events 表的表结构以及数据是如何生成的。
一.报时机器人启动 [3]
Rasa 对话系统启动方式详见参考文献[3]中执行程序部分,这里不再赘述。如下所示:
1.加载模型:rasa run --cors "*"
2.运行 action server:rasa run actions
3.运行 Web 页面:python -m http.server 8080
二.(tracker_store)endpoints.yml 和 events 表结构
使用 mysql 数据库来存储对话,使用 MySQL 新建 db 为 rasa_tracker_store,其中字符集和排序规则分别为 utf8mb4 -- UTF-8 Unicode 和 utf8mb4_0900_ai_ci。
1.endpoints.yml 配置文件
tracker_store:
type: SQL
dialect: "mysql+pymysql"
url: "localhost" # your mysql host
db: "rasa_tracker_store" # name of the mysql database
username: "root" # username to access the database
password: "root" # password to access the database
2.新建数据库 rasa_tracker_store
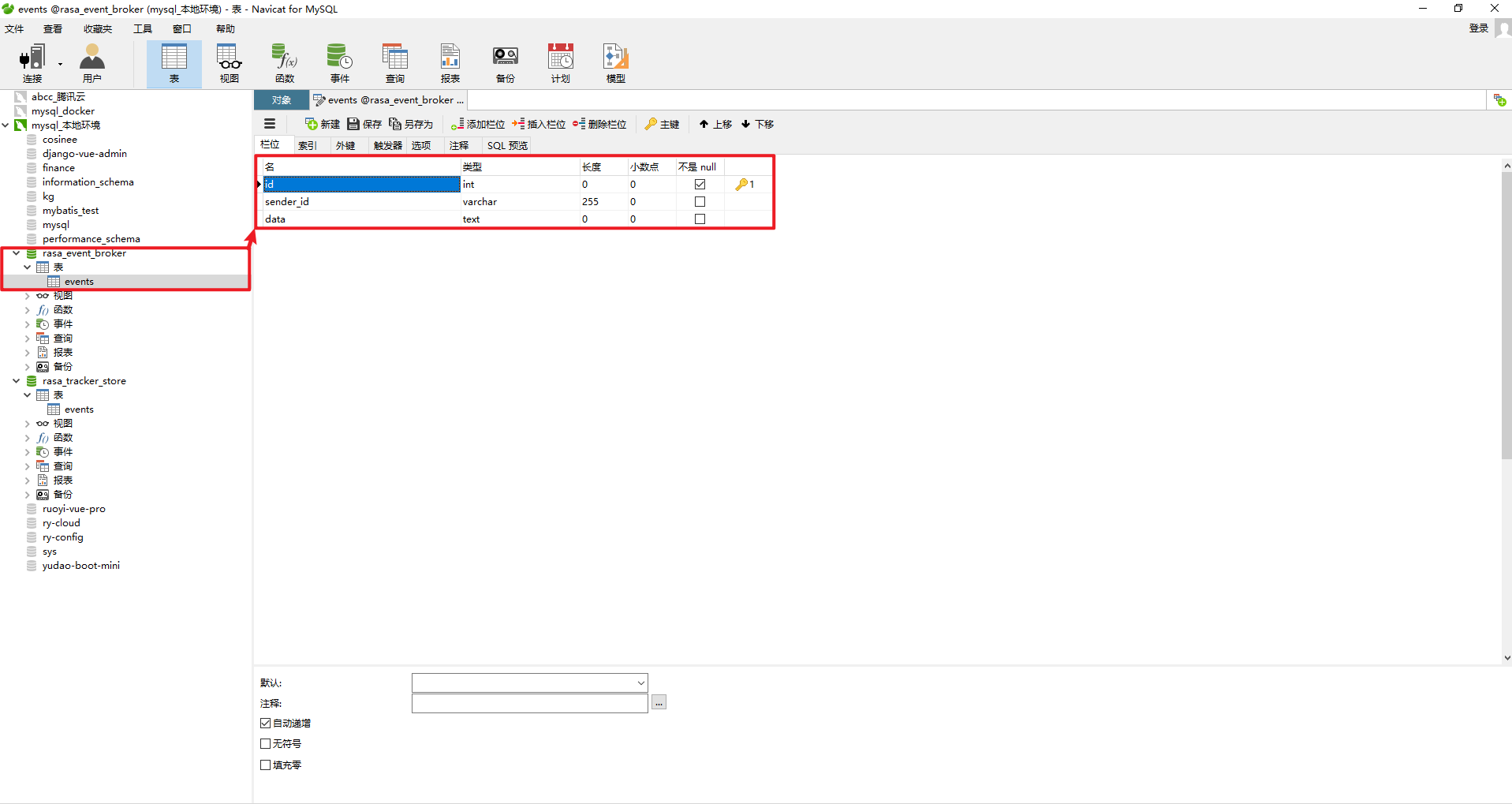
3.events 表结构
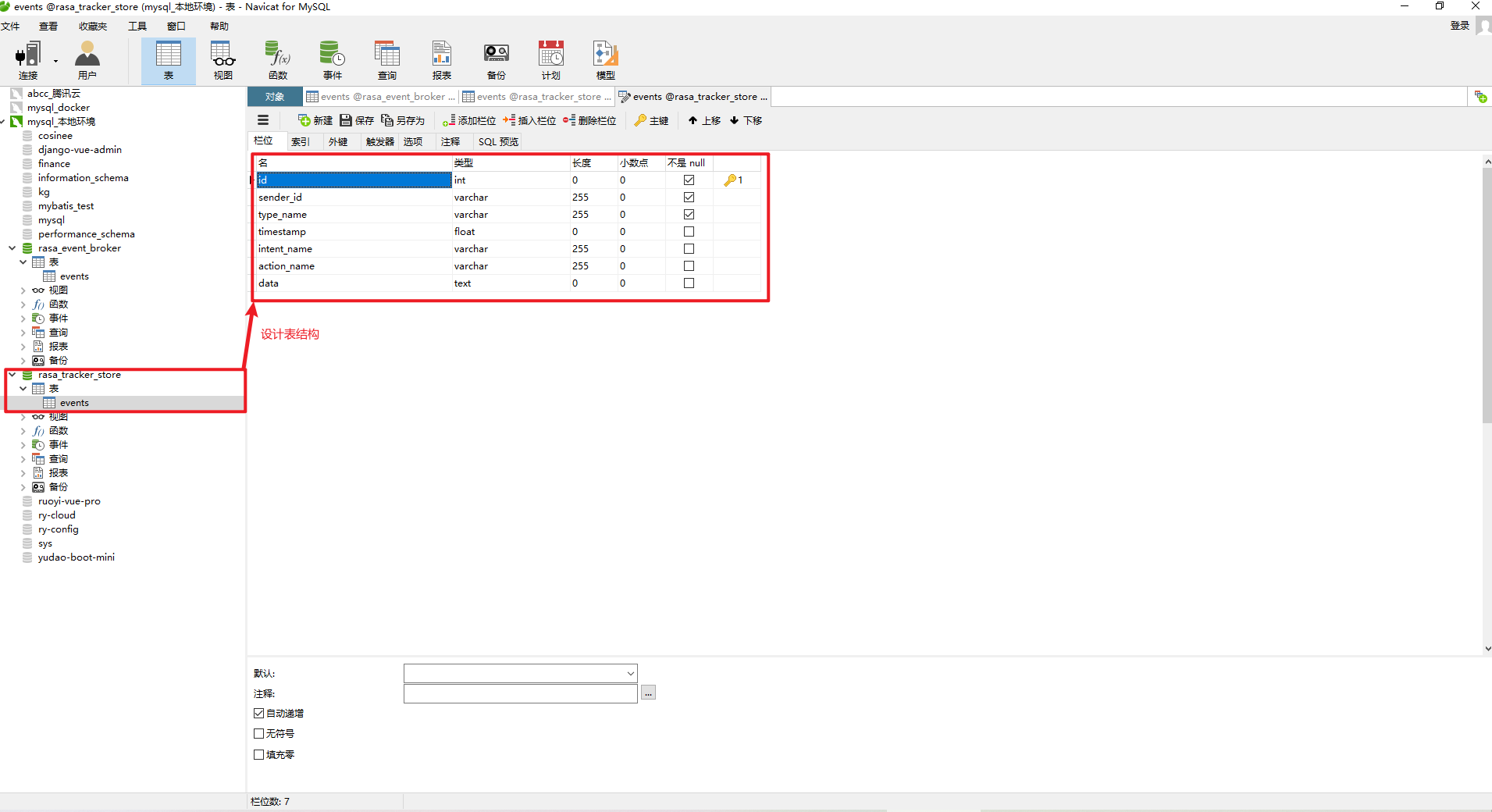
(1)id:主键 id
(2)sender_id:发送者 id
(3)type_name:event 的类型名字
(4)timestamp:时间戳
(5)intent_name:意图名字
(6)action_name:action 名字
(7)data:数据
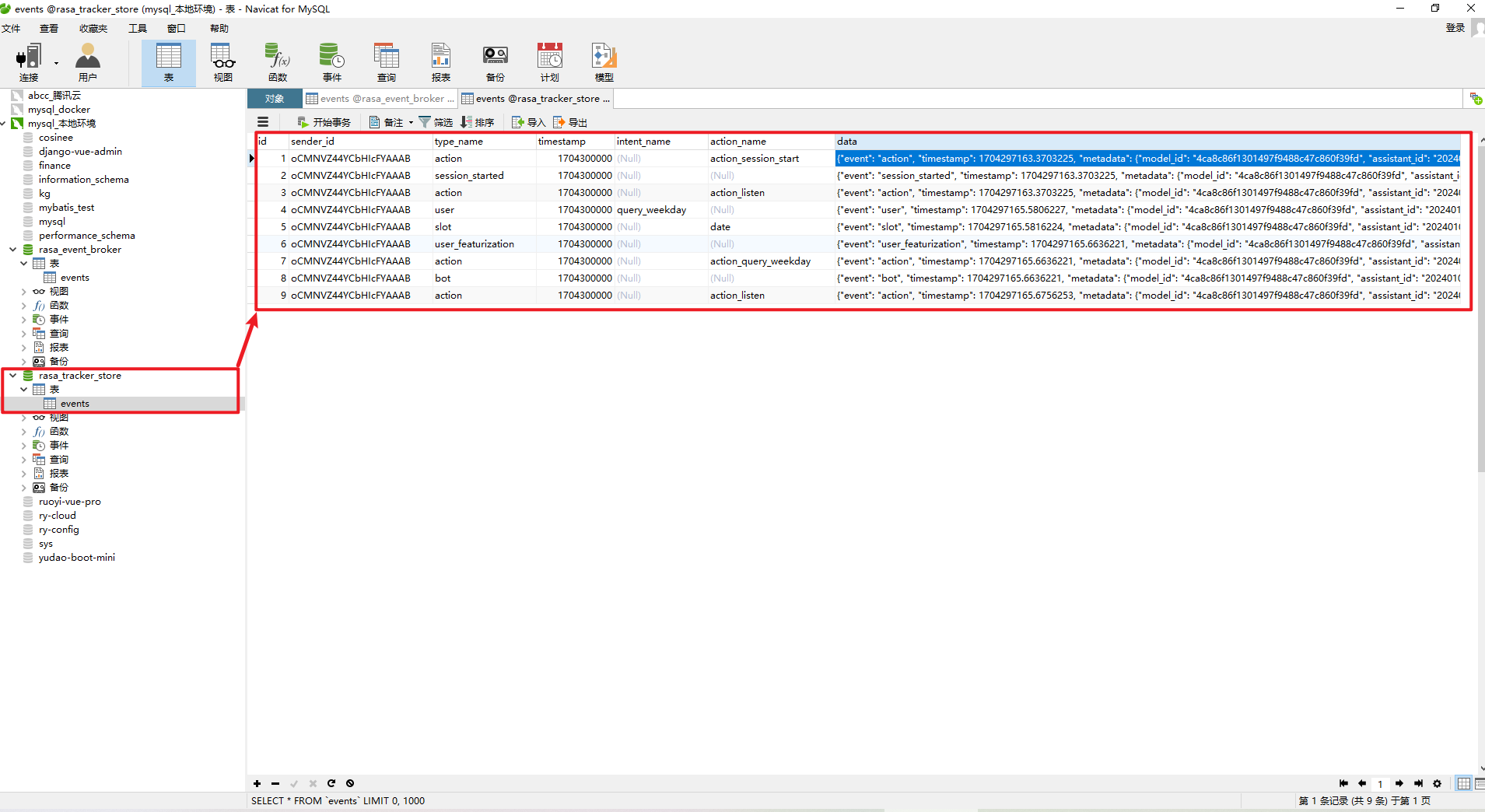
4.events 表数据内容
以用户问:"今天星期几",机器答:"星期三"为例子展开介绍。

生成的 rasa_tracker_store.events 数据表内容,如下所示:
(1)id:主键 id。
这个自增主键就不用多说了。
(2)sender_id:发送者 id。
比如,oCMNVZ44YCbHIcFYAAAB。这个数据是如何来的?生成的规则是什么呢?
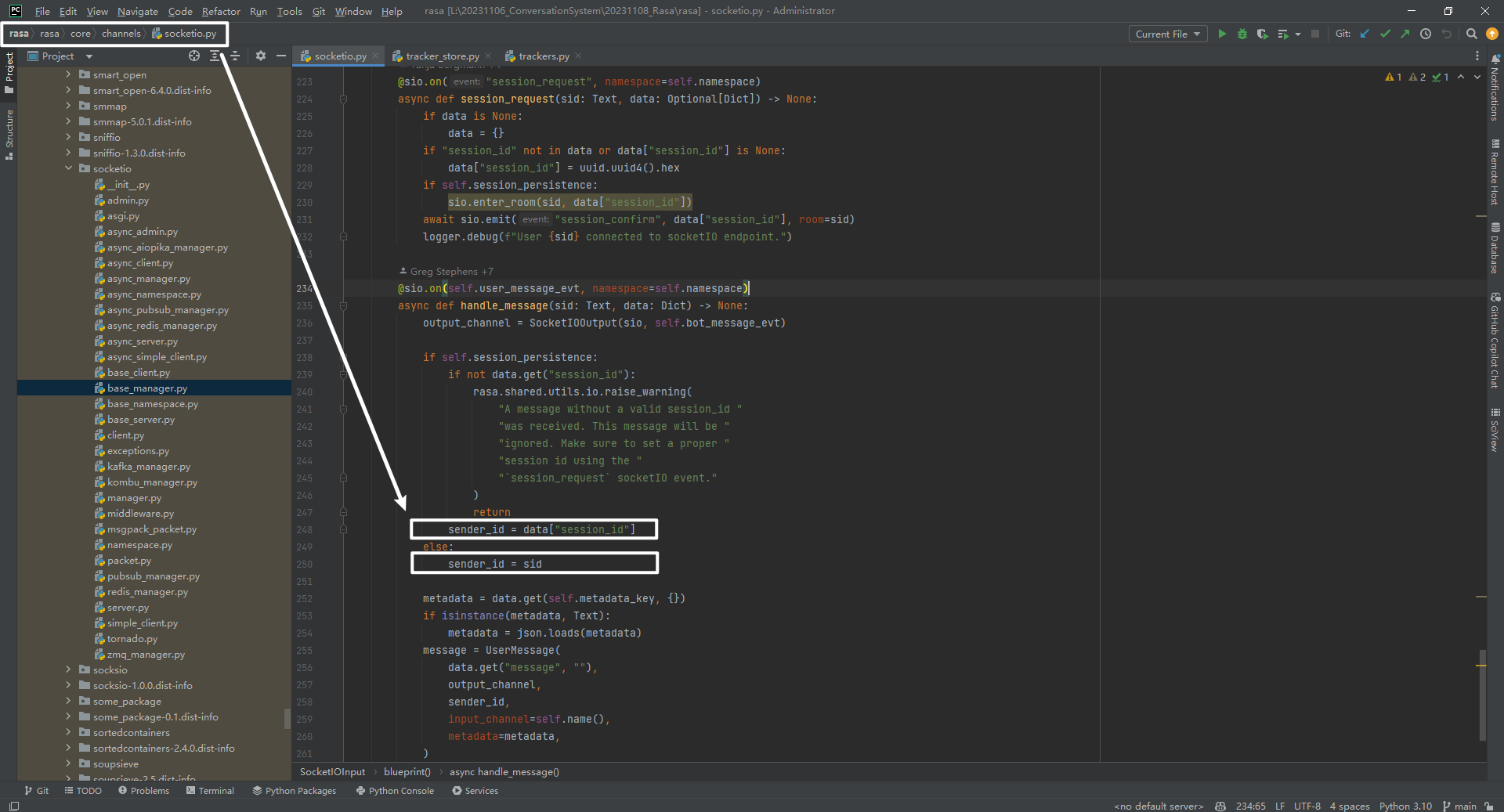
sender_id 是在 SQLTrackerStore 类中的 SQLEvent 子类中初始化的。SQLEvent 子类是 SQLAlchemy 的一部分,用于在数据库中创建一个表。在这个表中,sender_id 是一个字段,它的类型是字符串(最大长度为 255),并且它被设置为非空(nullable=False),并且为其创建了索引(index=True)。这意味着在数据库中,sender_id 字段不能为 null,并且可以被快速查找。
sender_id 是在创建 DialogueStateTracker 对象时传入的一个参数,它通常用于标识对话的发送者。在 Rasa 中,每个对话都有一个唯一的 sender_id,这样可以区分不同的用户会话。在 from_events 类方法中,sender_id 是作为第一个参数传入的。这个方法用于从一系列事件中创建一个 DialogueStateTracker 对象。这些事件会被应用到新的跟踪器上,以重建其状态。生成 sender_id 的具体规则取决于你的应用,当客户端是 Rasa Shell、Rasa X、HTTP API 等的时候,都不相同。由于本次使用的是 Socket 方式,可以顺藤摸瓜去找 sender_id 的具体生成规则,这里不再细节展开。rasa/core/channels/socketio.py 如下所示:
(3)type_name:event 的类型名字。
比如,action、session_started、user、slot、user_featurization、bot。这个数据是什么?除了这个数据还有其它的类型名字吗?(列出全部)。rasa/shared/core/events.py 如下所示:
| 序号 | 事件类 | 事件类型名字 | 备注 |
|---|---|---|---|
| 1 | Event(ABC)类 | "event" | 描述对话中的事件以及它们如何影响对话状态。用户与助手进行对话期间发生的所有事情的不可变表示。告诉 rasa.shared.core.trackers.DialogueStateTracker 如何在事件发生时更新其状态。 |
| 2 | UserUttered(Event) | "user" | 用户对机器人说了些什么。作为副作用,将在 Tracker 中创建一个新的 Turn。 |
| 3 | DefinePrevUserUtteredFeaturization(SkipEventInMDStoryMixin) | "user_featurization" | 存储 action 是基于文本还是意图预测的信息。 |
| 4 | EntitiesAdded(SkipEventInMDStoryMixin) | "entities" | 用于将提取的实体添加到 tracker 状态的事件。 |
| 5 | BotUttered(SkipEventInMDStoryMixin) | "bot" | 机器人对用户说了些什么。此类在故事训练中不使用,因为它包含在 ActionExecuted 类中。在 Tracker 中进行了记录。 |
| 6 | SlotSet(Event) | "slot" | 用户已指定其对 slot 值的偏好。每个 slot 都有一个名称和一个值。此事件可用于在对话中设置 slot 的值。作为副作用,Tracker 的插槽将被更新,以便 tracker.slots[key]=value。 |
| 7 | Restarted(AlwaysEqualEventMixin) | "restart" | 对话应该重新开始,历史记录被擦除。与删除所有事件不同,可以使用此事件来重置跟踪器状态(例如,忽略任何过去的用户消息并重置所有插槽)。 |
| 8 | UserUtteranceReverted(AlwaysEqualEventMixin) | "rewind" | 机器人会撤消最近的用户消息之前的所有内容。机器人将撤消最新的 UserUttered 之后的所有事件,这也意味着跟踪器上的最后一个事件通常是 action_listen,机器人正在等待新的用户消息。 |
| 9 | AllSlotsReset(AlwaysEqualEventMixin) | "reset_slots" | 所有插槽都重置为其初始值。如果要保留对话历史记录并仅重置插槽,则可以使用此事件将所有插槽设置为其初始值。 |
| 10 | ReminderScheduled(Event) | "reminder" | 在给定时间安排异步触发用户意图。如果需要,触发的意图可以包括实体。 |
| 11 | ReminderCancelled(Event) | "cancel_reminder" | 取消某些工作。 |
| 12 | ActionReverted(AlwaysEqualEventMixin) | "undo" | 机器人撤消了最后的操作。机器人会撤消最近的操作之前的所有内容。这包括操作本身以及操作创建的任何事件,例如设置插槽事件-机器人现在将使用最近操作之前的状态来预测新操作。 |
| 13 | StoryExported(Event) | "export" | 故事应该转储到文件。 |
| 14 | FollowupAction(Event) | "followup" | 排队后续操作。 |
| 15 | ConversationPaused(AlwaysEqualEventMixin) | "pause" | 忽略用户的消息,让人类接管。作为副作用,Tracker 的 paused 属性将被设置为 True。 |
| 16 | ConversationResumed(AlwaysEqualEventMixin) | "resume" | 机器人接管对话。PauseConversation 的反义词。作为副作用,Tracker 的 paused 属性将被设置为 False。 |
| 17 | ActionExecuted(Event) | "action" | 操作描述了执行的操作 + 其结果。它包括一个操作和一个事件列表。操作将附加到 Tracker.turns 中的最新 Turn。 |
| 18 | AgentUttered(SkipEventInMDStoryMixin) | "agent" | agent 对用户说了些什么。由于它包含在 ActionExecuted 类中,因此此类在故事训练中不使用。在 Tracker 中进行了条目。 |
| 19 | ActiveLoop(Event) | "active_loop" | 如果给出了 name:使用 name 激活循环,否则停用活动循环。 |
| 20 | LegacyForm(ActiveLoop) | "form" | 旧 Form 事件的旧版处理程序。ActiveLoop 事件曾被称为 Form。这个类是为了处理旧的遗留事件,这些事件是使用旧的类型名称 form 存储的。 |
| 21 | LoopInterrupted(SkipEventInMDStoryMixin) | "loop_interrupted" | FormPolicy 和 RulePolicy 添加的事件。通知表单操作是否验证用户输入。 |
| 22 | LegacyFormValidation(LoopInterrupted) | "form_validation" | 旧 FormValidation 事件的旧版处理程序。LoopInterrupted 事件曾被称为 FormValidation。这个类是为了处理旧的遗留事件,这些事件是使用旧的类型名称 form_validation 存储的。 |
| 23 | ActionExecutionRejected(SkipEventInMDStoryMixin) | "action_execution_rejected" | 通知 Core 操作的执行已被拒绝。 |
| 24 | SessionStarted(AlwaysEqualEventMixin) | "session_started" | 标记新会话会话的开始。 |
(4)timestamp:Unix 时间戳。
比如,1704300000,转换后的日期时间:2024-01-03 16:40:00。Unix 时间戳是指从 1970 年 1 月 1 日 00:00:00UTC(协调世界时)开始的秒数。
from datetime import datetime
timestamp = 1704300000
date_object = datetime.utcfromtimestamp(timestamp)
print("转换后的日期时间:", date_object)
(5)intent_name:意图名字
比如,query_weekday。报时机器人总共的意图包括 greet、goodbye、query_time、query_date、query_weekday。对应的例子如下所示:
version: "3.0"
nlu:
- intent: greet
examples: |
- 你好
- 您好
- hello
- hi
- 喂
- 在么
- intent: goodbye
examples: |
- 拜拜
- 再见
- 拜
- 退出
- 结束
- intent: query_time
examples: |
- 现在几点了
- 什么时候了
- 几点了
- 现在什么时候了
- 现在的时间
- intent: query_date
examples: |
- [今天](date)几号
- [今天](date)是几号
- [昨天](date)几号
- [明天](date)几号
- [今天](date)的日期
- [今天](date)几号了
- [明天](date)的日期
- 几号
- intent: query_weekday
examples: |
- [今天](date)星期几
- [明天](date)星期几
- [昨天](date)星期几
- [今天](date)是星期几
- 星期几
(6)action_name:action 名字
比如,action_session_start(会话开始)、action_listen(机器人处于监听状态,机器人每次回答完毕后都会处于监听状态)、date(日期实体)、action_query_weekday(自定义 action)。除此之外,还有哪些 action_name 呢?(列出全部)。rasa/core/actions/action.py 如下所示:
| 序号 | 动作类 | 动作名字 | 备注 |
|---|---|---|---|
| 1 | Action | NotImplementedError | 响应对话状态的下一个操作。 |
| 2 | ActionBotResponse(Action) | —— | 一个动作,其唯一效果是在运行时发出响应。 |
| 3 | ActionEndToEndResponse(Action) | —— | 动作以端到端响应向用户发出响应。 |
| 4 | ActionRetrieveResponse(ActionBotResponse) | —— | 查询响应选择器以获取适当的响应的操作。 |
| 5 | ActionBack(ActionBotResponse) | "action_back" | 将跟踪器状态恢复两个用户话语。 |
| 6 | ActionListen(Action) | "action_listen" | 任何回合中的第一个动作-机器人等待用户消息。机器人应停止采取进一步的操作,并等待用户说些什么。 |
| 7 | ActionRestart(ActionBotResponse) | "action_restart" | 将跟踪器重置为其初始状态。如果可用,则发出重启响应。 |
| 8 | ActionSessionStart(Action) | "action_session_start" | 应用一个对话会话开始,将上一个会话中的所有 SlotSet 事件应用于新会话。 |
| 9 | ActionDefaultFallback(ActionBotResponse) | "action_default_fallback" | 执行回退操作并返回对话的上一个状态。 |
| 10 | ActionDeactivateLoop(Action) | "action_deactivate_loop" | 停用活动循环。 |
| 11 | RemoteAction(Action) | —— | —— |
| 12 | ActionRevertFallbackEvents(Action) | "action_revert_fallback_events" | 撤消 TwoStageFallbackPolicy 期间完成的事件。这将撤消在 TwoStageFallbackPolicy 的回退期间完成的用户消息和机器人话语。通过这样做,不需要为不同的路径编写自定义故事,而只需要编写快乐的路径。这已被弃用,一旦删除 TwoStageFallbackPolicy,就可以删除它。 |
| 13 | ActionUnlikelyIntent(Action) | "action_unlikely_intent" | 一个动作,指示 NLU 预测的意图是意外的。此操作可以由 UnexpecTEDIntentPolicy 预测。 |
| 14 | ActionDefaultAskAffirmation(Action) | "action_default_ask_affirmation" | 默认实现,询问用户确认他的意图。建议使用自定义操作覆盖此默认操作,以获得更有意义的确认提示。例如。具有意图的描述而不是其标识符名称。 |
| 15 | ActionDefaultAskRephrase(ActionBotResponse) | "action_default_ask_rephrase" | 默认实现,询问用户重新表达他的意图。 |
| 16 | ActionSendText(Action) | "action_send_text" | 向输出通道发送文本消息。 |
| 17 | ActionExtractSlots(Action) | "action_extract_slots" | 每个用户回合后自动运行的默认操作。在下一个预测的操作运行之前,在 MessageProcessor.handle_message(...)中自动执行操作。根据分配的槽映射将插槽设置为从用户消息中提取的值。 |
| 18 | ACTION_TWO_STAGE_FALLBACK_NAME | "action_two_stage_fallback" | —— |
| 19 | ACTION_VALIDATE_SLOT_MAPPINGS | "action_validate_slot_mappings" | —— |
| 20 | RULE_SNIPPET_ACTION_NAME | "..." | —— |
(7)data:数据
取出一条 data 数据字段进行 json 显示,如下所示:
{
"event": "action",
"timestamp": 1704297163.3703225,
"metadata": {
"model_id": "4ca8c86f1301497f9488c47c860f39fd",
"assistant_id": "20240103-232935-excited-category"
},
"name": "action_session_start",
"policy": null,
"confidence": 1.0,
"action_text": null,
"hide_rule_turn": false
}
event:事件的名字。(列出全部)timestamp:时间戳。metadata-model_id:模型 id。这个并不是模型的名字,比如训练的报时机器人模型为20240103-233232-windy-borzoi.tar.gz。metadata-assistant_id:这个是 config.yml 文件中定义的 assistant_id: 20240103-232935-excited-category。name:action 的名字。 policy:使用的策略。 confidence:置信度。 action_text:动作文本,即端到端机器人响应的文本。 hide_rule_turn:是否隐藏规则回合。
上述字段大都来自于 ACTION_EXECUTED(rasa/shared/utils/schemas/events.py),ACTION_EXECUTED 是一个字典,它定义了 Rasa 中 "action" 事件的 JSON schema。这个 schema 描述了 "action" 事件的数据结构,包括它的属性和这些属性的类型。如下所示:
ACTION_EXECUTED = {
"properties": {
"event": {"const": "action"},
"policy": {"type": ["string", "null"]},
"confidence": {"type": ["number", "null"]},
"name": {"type": ["string", "null"]},
"hide_rule_turn": {"type": "boolean"},
"action_text": {"type": ["string", "null"]},
}
}
在 ACTION_EXECUTED schema 中,相关属性解释如下所示:
event: 这是一个常量,值为 "action",表示这是一个 "action" 事件。policy: 这是一个字符串,表示执行这个动作的策略的名称。它也可以为 null。confidence: 这是一个数字,表示执行这个动作的策略的置信度。它也可以为 null。name: 这是一个字符串,表示执行的动作的名称。它也可以为 null。hide_rule_turn: 这是一个布尔值,表示是否隐藏规则回合。action_text: 这是一个字符串,表示动作的文本。它也可以为 null。
这个 schema 用于验证 "action" 事件的数据是否符合预期的格式。如果一个 "action" 事件的数据不符合这个 schema,那么在处理这个事件时,Rasa 将会抛出一个错误。
5.action 和 event 间的关系
在 Rasa 中,动作(action)和事件(event)是两个不同但相关的概念。如下所示:
(1)action
动作是在对话中执行的一些操作,例如向用户发送消息、调用外部服务、或者进行自定义的计算。在 Rasa 中,动作通常与对话策略相关联,用于决定在特定的对话状态下应该执行哪个动作。动作由自定义的动作类或内置的动作类实现,它们被定义为继承自 Action 类。
(2)event
事件是对话中的状态更改的表示,例如用户的输入、机器人的响应、槽位的更新等。在 Rasa 中,对话的历史记录是一系列事件的集合。事件被用于跟踪对话的状态,对话管理器使用事件来更新对话状态。不同的事件类型表示不同的对话动作和状态变化。
(3)两者关系
当动作执行时,通常会生成一个或多个事件,这些事件描述了对话状态的变化。 每个对话轮次中都会有一系列事件,包括用户的输入事件(例如 UserUttered)、动作执行事件(例如ActionExecuted)、槽位更新事件(例如SlotSet)、机器人响应事件(例如BotUttered)等。
在对话中,动作和事件密切相互关联。动作执行时会触发事件,这些事件进而影响对话状态的演进。一般来说,对话的历史记录中的事件序列描述了对话的全貌,对话管理器利用这些事件来进行决策。
三.(event_broker)endpoints.yml 和 events 表结构
1.endpoints.yml 配置文件
使用 mysql 数据库来消息队列,如下所示:
event_broker:
type: SQL
url: "localhost"
port: 3306
dialect: "mysql+pymysql"
username: "root"
password: "root"
db: "rasa_event_broker"
2.新建数据库 rasa_tracker_store
创建数据库方式与 rasa_tracker_store 相同,这里不再赘述。
3.events 表结构
生成的 rasa_event_broker.events 数据表内容,如下所示:
(1)id:主键 id
(2)sender_id:发送者 id
(3)data:数据
4.events 表数据内容
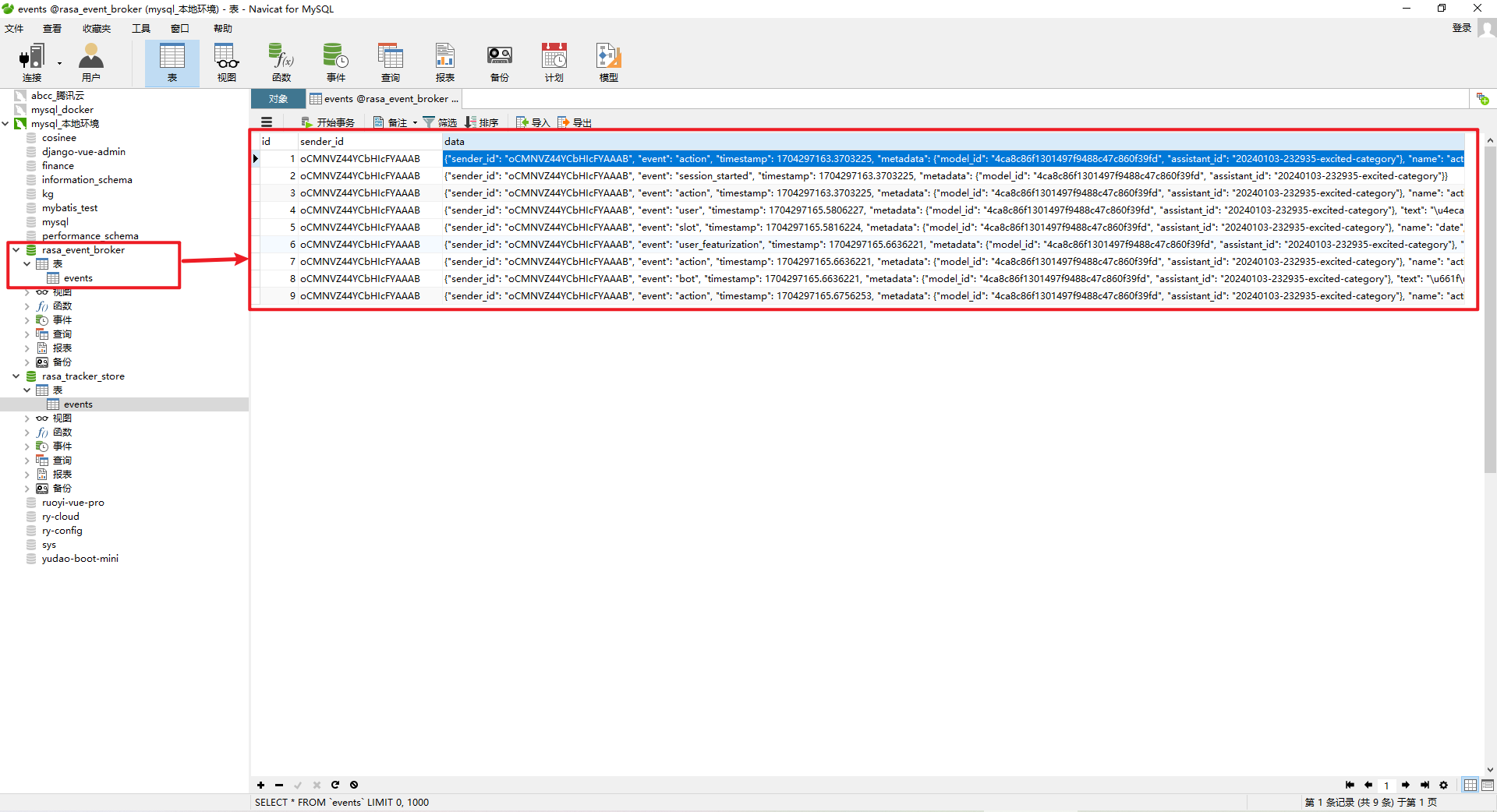
取出一条 data 数据字段进行 json 显示,如下所示:
{
"sender_id": "oCMNVZ44YCbHIcFYAAAB",
"event": "action",
"timestamp": 1704297163.3703225,
"metadata": {
"model_id": "4ca8c86f1301497f9488c47c860f39fd",
"assistant_id": "20240103-232935-excited-category"
},
"name": "action_session_start",
"policy": null,
"confidence": 1.0,
"action_text": null,
"hide_rule_turn": false
}
发现 event_broker.events.data 和 tracker_store.events.data 相比,除了多一个 sender_id 字段,其它的都是一样的。跟踪源码发现,如下所示:
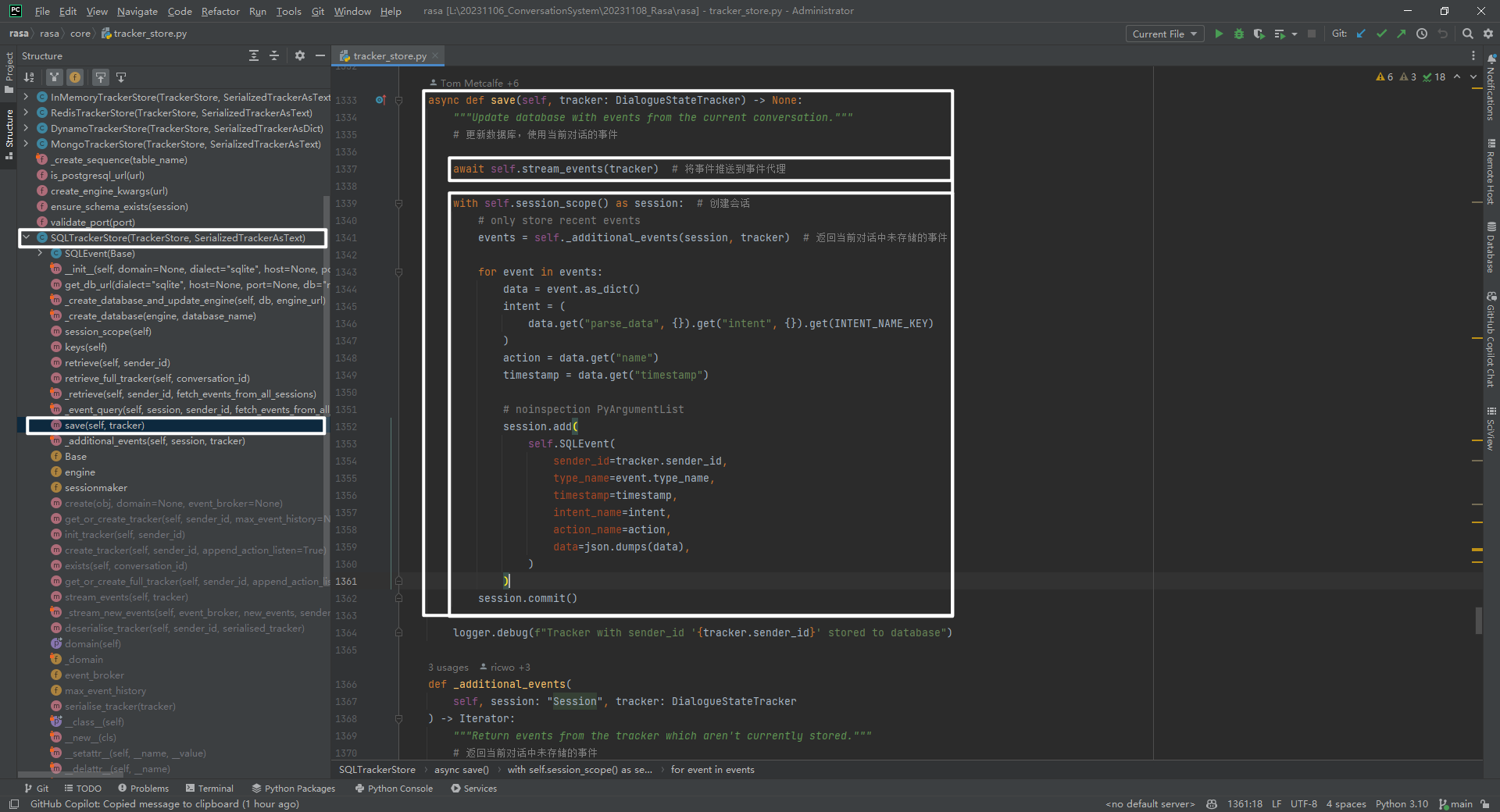
执行顺序是先发布新的 tracker 事件集合到 event_broker,然后逐一遍历 event,并将其存储到 tracker_store.event 表中。
四.EventBroker 类和 SQLEventBroker(EventBroker)类
1.EventBroker 类

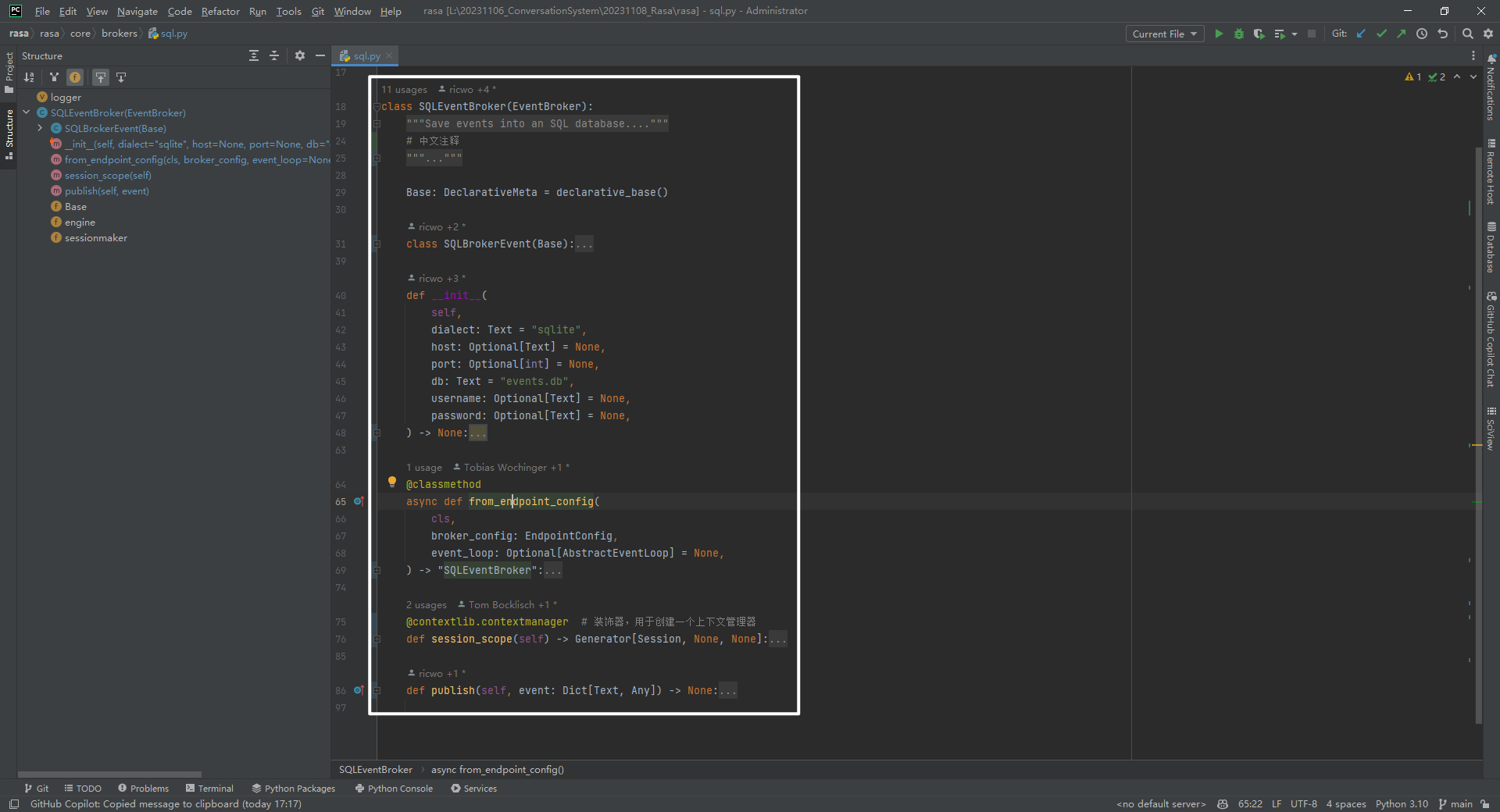
2.SQLEventBroker(EventBroker)类
SQLEventBroker(EventBroker)类有个内部类 SQLBrokerEvent(Base),定义了 events 的 3 个字段,分别为 id、sender_id 和 data。剩下的基本是对 EventBroker 基类中方法的具体实现。rasa/core/brokers/sql.py 如下所示:
五.TrackerStore 类和 SQLTrackerStore 类
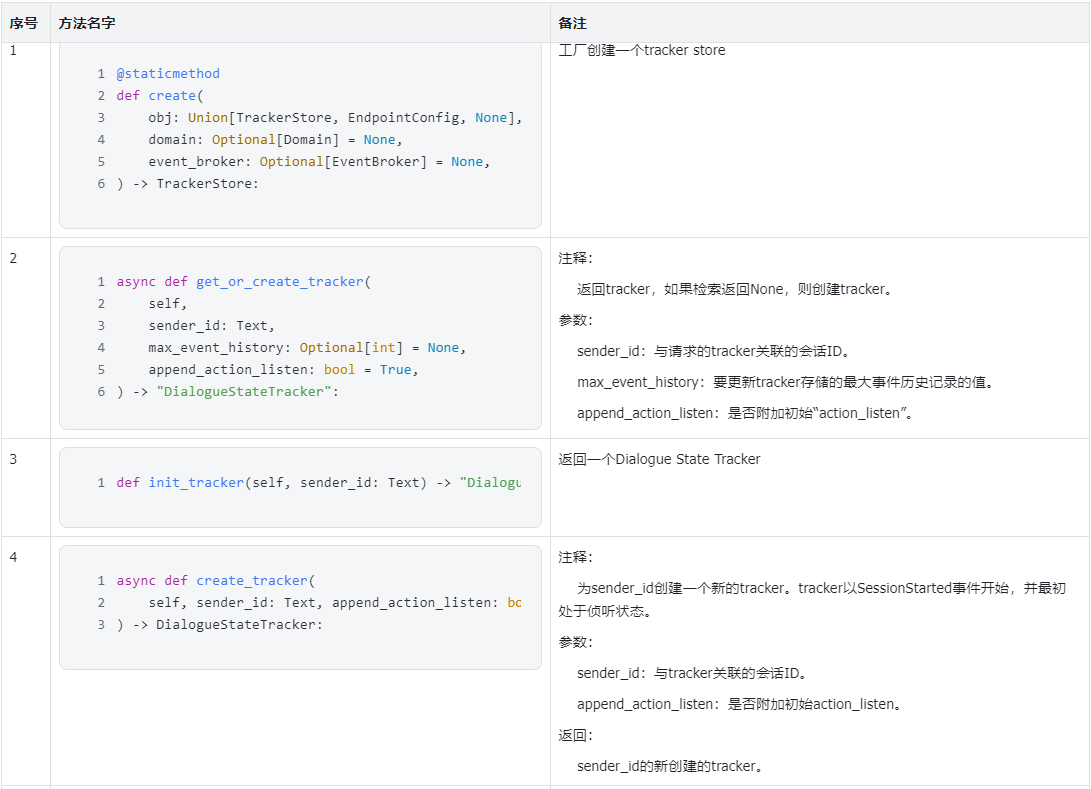
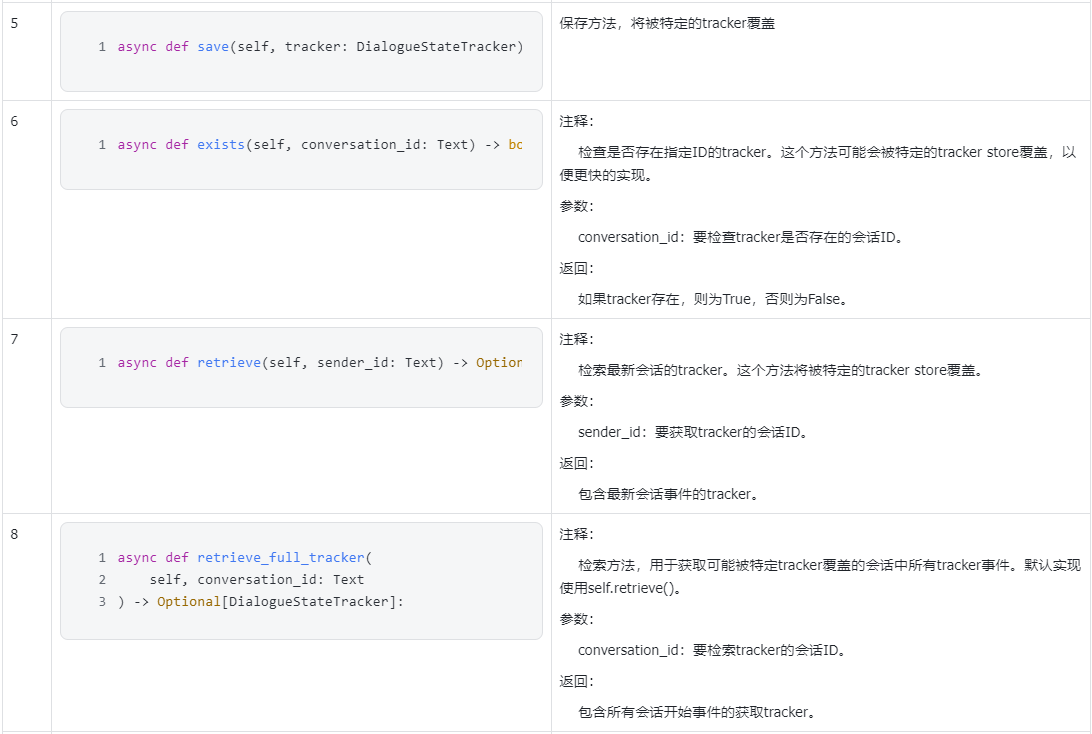
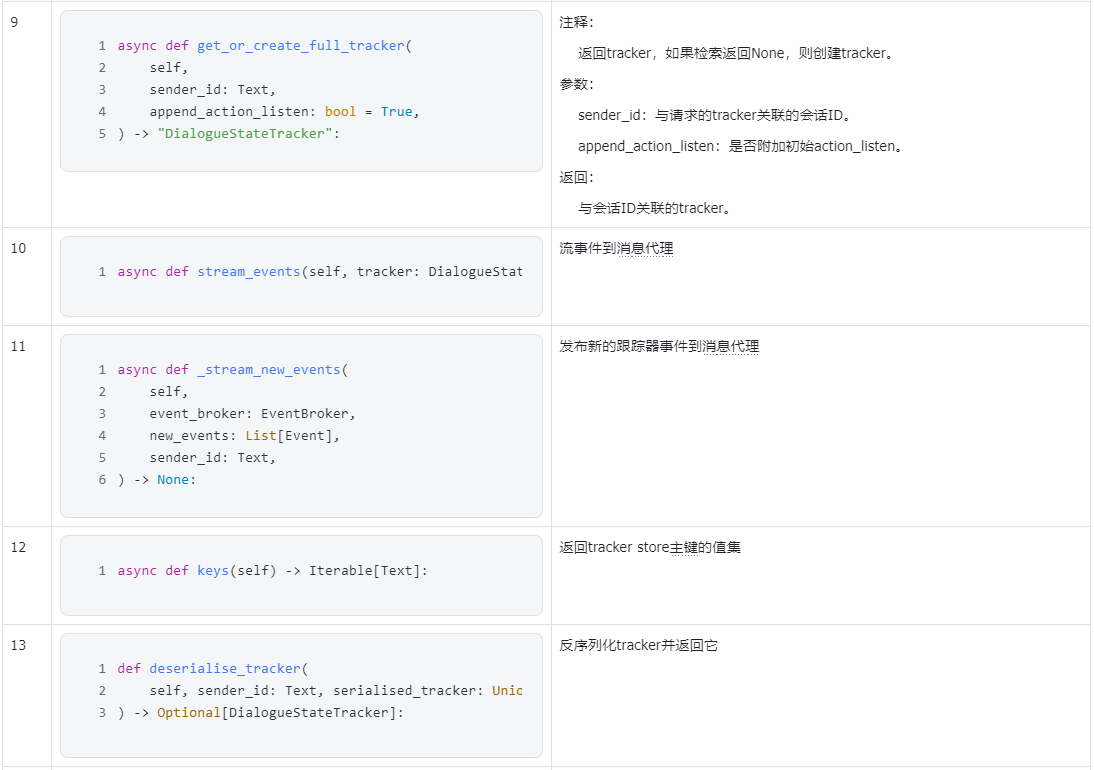
1.TrackerStore 类
表示所有 TrackerStore 的公共行为和接口,如下所示:

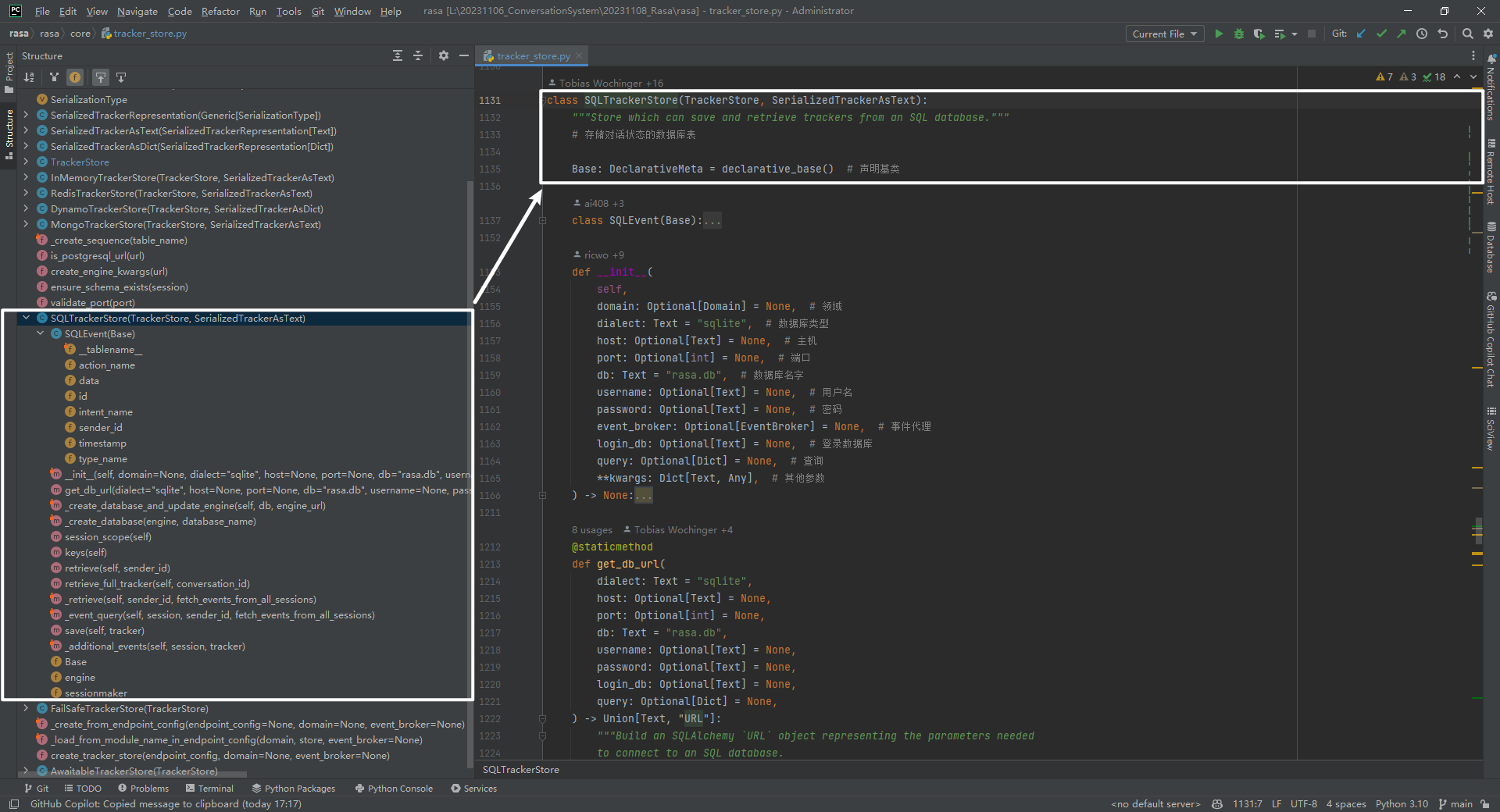
2.SQLTrackerStore 类
对 TrackerStore 基类的实现,包括 InMemoryTrackerStore、RedisTrackerStore、DynamoTrackerStore、MongoTrackerStore、SQLTrackerStore。SQLTrackerStore(TrackerStore, SerializedTrackerAsText)类有个内部类 SQLEvent(Base),定义了 events 的 7 个字段,分别为 id、sender_id、type_name、timestamp、intent_name、action_name 和 data。剩下的基本是对 TrackerStore 基类中方法的具体实现。rasa/core/tracker_store.py 如下所示:
参考文献
[1] rasa-v2024010701(报时机器人)源码:https://github.com/ai408/nlp-engineering/tree/main/知识工程-对话系统/公众号代码/rasa-v2024010701
[2] 报时机器人的 rasa shell 执行流程分析:https://z0yrmerhgi8.feishu.cn/wiki/CvASwk5SmiYkCXkqONycSxVfnJg
[3] 打通 Rasa Action Server 和 LLM 接口的尝试方法:https://z0yrmerhgi8.feishu.cn/wiki/UQa0wQBeJi6K7oknz2wcaSTnnNb
[4] 以报时机器人为例详细介绍tracker_store和event_broker:https://z0yrmerhgi8.feishu.cn/wiki/SQSGwzYR7iKSNukQDKicz1Vqnvg