-
DDPM的学习
Denoising Model
- 首先是宏观理解一下
Denoising Model 的输入
- 去噪很多步,用的是同一个Denoising Model,但是输入图片可能差距很大。解决方法:给Denoising Model多输入一个变量,表示现在的去噪阶段,让Denoising Model根据不同的噪音程度做出不同反应

Denoising Model内部结构
- 在其内部有一个噪音预测模块,根据输入的图片和去噪阶段,预测这张图片的噪声是什么,得到这个噪声后,让输入图片减去这个噪声,就是这个Denoising Model的输出
- 为什么要预测噪声呢,如果直接输入图片然后输出去噪后的图片,那这意味着模型可以画那个输出图片了,这是非常困难的,而预测噪音相对来说就比较容易

如何训练Denoising Model
- 训练Denoising Model就是训练Noise Predicter,那就要有真实的噪音,这样Noise Predicter才能学习如何预测噪音。

- 这个训练数据是人为创造的(拿一张图片,自己加噪声),这个过程叫Forward Proces(Diffusion Process)

- 这时候就有Noise Predicter的训练资料了,如下图的input图片和阶段2是Noise Predicter的输入,而它的输出就应该是那个真实的噪声,训练Noise Predicter让它的输出接近这个噪声

对于Text-to-image
-
还是需要文字标签和图片两种信息的资料
-
训练集数据集,像midjourney、stable diffusion、DALL都是用的第三个数据集50多亿张训练图片

-
直接将文字输入到Denoising Model

-
而Noising Predicter部分也直接加入文字资料

-
训练部分的修改,也是在去噪过程中将文章资料给Denoising Model,这代表Denoising有三个输入

-
下面是详细过程
DDPM的算法流程

训练

- 首先从数据库得到一个清晰的图片x0
- 然后随机从1到T中得到一个t,代表要加噪的程度(真实操作是直接一步到位,不会一步一步添加噪声,直接到这个t的噪音层次)
- 然后从标准正态分布中采样一个噪音ε
- αt中的t是上面的t,t越大αt越小,αt是0到1之间的值;这里括号内的意思是给x0和ε分别赋权重,然后把两个图片加和在一起;εθ就是Noise Predicter,在εθ输入含噪声图片和t,然后让它输出预测的噪音,再拿真实的噪音减去预测的,最小化这个差值
- αt是一个用于控制噪声注入量的超参数,是在训练前就设定好的,他是一个逐渐减小的序列,目的是让模型逐渐适应越来越大的噪声。

- αt是一个用于控制噪声注入量的超参数,是在训练前就设定好的,他是一个逐渐减小的序列,目的是让模型逐渐适应越来越大的噪声。
- 想象中加噪音是一点一点加的,但实际上是一步到位
- 真实高斯噪声和模型预测的高斯噪声通过均方误差(MSE)来计算损失,然后更新梯度
生成

- 首先从标准正态分布中采样一个高斯噪声
- 然后从第T阶段一步一步像原始图像推进
- 再采样一个高斯噪声Z用来模拟T-1步的方差,即在生成过程中加入噪音会生成的更好
- 第四步的公式,代表生成了第Xt-1阶段的图像,等式右边的第一项是去噪模型生成εθ(高斯噪声),其它都是已知量,再加上Z,形成的新的高斯噪声,从这上面随机采样可得到Xt-1的图片
前向传播
- 设从数据集得到的图片为X0,在逐渐加噪的过程中,可由Xt-1得到Xt,εt是这一步骤所加的高斯噪声

- 由Xt-2得到Xt,εt-1和εt分别是两步的高斯噪声,都服从标准正态分布

- 上面公式先忽略高斯噪声的系数,其实就是两个高斯噪声相加,也就是叠加它们的概率分布,下面是两个正态分布的叠加公式

- 将εt-1和εt的系数看为一个常数,正态分布乘以一个常数,它的均值μ和标准差σ都乘以这个系数,由于εt-1和εt都服从标准正态分布,所以它们的均值为0标准差为1,所以εt-1和εt和其对应系数表示的正态分布分别为

- 根据正态分布叠加公式可得综合εt-1和εt正态分布的新的正态分布的均值和标准差,从这个新的正态分布上采样得到的随机数,就等同于之前两个带系数的εt-1和εt正态分布采样的和,也就是直接在这个上采样,就替代了那两个

- 也就是拿一个标准正态分布,再乘以新的系数,形成新的正态分布,也就是用这个新的正态分布就代替了前面两个

- 然后可继续将Xt-2换为Xt-3等等重复进行,使用数学归纳法可得

- 其中的αtαt-1…α1很长,用其它符号代替,可得下面公式,这样就可以从X0一步到Xt,一次把高斯噪声加完

反向传播
贝叶斯定理
- 现已知男孩抓到娃娃机了,问在抓到的这个娃娃是在公交站那里抓到的概率是多少,在地铁站旁边抓到娃娃的概率是多少

- 贝叶斯公式
- P(A)和P(B)是两个随机概率,P(B|A)是A发生情况下B发生的概率,P(A|B)是B发生情况下A发生的概率(也可以理解为在B发生的情况,B的发生是由A发生所引起的概率)
- 在刚才的例子中P(A)指小明坐公交或地铁的概率,是基于之前的经验称为先验概率prior
- P(A|B)同样指小明坐公交或地铁的概率,但是是在B事件发生后对先验概率P(A)的修正,所以称为后验概率posterior
- 上面修正的基础是因为看到了B事件的发生,所以B事件称为证据Evidence
- P(B|A)表示在A事件发生前提下B事件很有可能发生,所以称为似然Likelihood,它的值可以看作为B事件对A事件的归因力度,即当P(B|A)值越大时,B事件就提供更强的证据支持A事件,所以P(B|A)也可以理解为B事件对A事件的证据强度

反向传播公式推导
- 由于Xt-1到Xt的加高斯噪声是随机事件,所以从Xt到Xt-1也是一个随机事件,套用贝叶斯公式可得

- 其中的P(Xt-1)和P(Xt)分别表示Xt-1和Xt时刻的概率,也就是从X0原图得到它们的概率(加高斯噪声可以看做一个随机事件),则改写公式可以写为P(Xt-1|X0),P(Xt|X0),但X0可以认为百分百的事件

- 为了匹配给另外两项也加上X0的条件,表示在相同的X0条件下,其实可以忽略它们,至此只需要求解右边式子就能得出Xt条件下Xt-1的概率

- 概率和高斯噪声的转换:P(Xt|Xt-1,X0)对应的高斯噪声如下图所示
- εt是标准正态分布,它的均值是0,标准差为1,乘以一个系数均值和标准差都要乘,然后再加上一个常数,只需要均值加即可,可得下面新的高斯噪声,这个高斯噪声就是给定Xt-1时刻,对应的Xt时刻概率分布
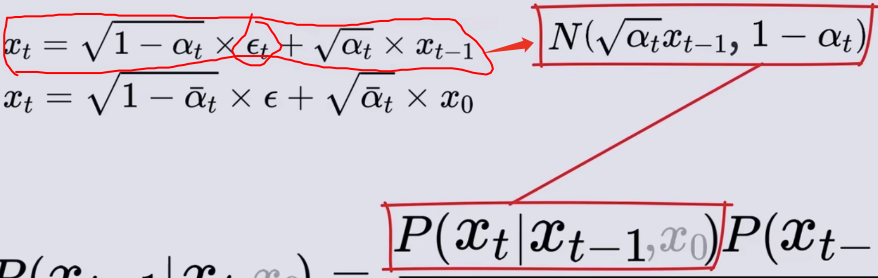
- εt是标准正态分布,它的均值是0,标准差为1,乘以一个系数均值和标准差都要乘,然后再加上一个常数,只需要均值加即可,可得下面新的高斯噪声,这个高斯噪声就是给定Xt-1时刻,对应的Xt时刻概率分布
- 同理可得其它两项对应的正态分布

- 当正态分布的均值和方差确定后,就可以把他们写成正态分布的 概率密度函数形式

- 再将这三个概率密度函数带入到贝叶斯公式中

- 我们的目标是求解给定Xt条件下Xt-1的概率,实际上它也是正态分布,接下来要做的是将等式右边变换为Xt-1的概率密度函数的形式,最终可以变为下式

- 所以P(Xt-1|Xt,X0)对应的正态分布如下

- 我们的最终目标是利用Xt到前一时刻Xt-1的关系,从XT开始不断使用这个关系迭代到直到X0,X0是需要求得的结果,但现在却出现在P(Xt-1|Xt,X0)的概率分布中,说明上式存在问题。
- 解决方法:之前已经求得了X0到Xt的公式,将这个公式用Xt表示X0,代入上式即可

- 解决方法:之前已经求得了X0到Xt的公式,将这个公式用Xt表示X0,代入上式即可
- 最后得到下面公式:它表示的就是,对于任意的Xt时刻的图像,都可以认为是从某个X0原图直接加噪得来的,而只要知晓了从X0到Xt加入的高斯噪声ε,就能得到它的前一时刻Xt-1的概率分布

- P(Xt-1|Xt,X0)的均值可以再化简为如下图

- 所以去噪模型的输出是下面的东西

- 上面的P(Xt-1|Xt,X0)的最终化简其实就是生成阶段的那个公式,因为红框内部分是均值,所以要加上一个高斯分布代表考虑了方差

- 损失就是下面这个,主要就是预测的噪声分布和真实的噪声分布的差最小

参考资料:李宏毅老师的DDPM
B站视频:https://www.bilibili.com/video/BV1tz4y1h7q1/?
deep_thoughts视频:https://www.bilibili.com/video/BV1b541197HX/
-
相关阅读:
Scrapy入门
MySQL的时区引起的前后端数据交互不畅的问题解决
Python函数语法与面向对象回顾(精华)
Redis的五种数据类型详解
单机模式与集群模式的区别?
【LeetCode】191、461、190、118、268
公众号选题方向有哪些?
Python之写文件操作(二十九)
Linux内核VFS详解
【SQL语法基础】什么是SQL函数?为什么使用SQL函数可能会带来问题?
- 原文地址:https://blog.csdn.net/Are_you_ready/article/details/134502334