-
计算机视觉的应用17-利用CrowdCountNet模型解决人群数量计算问题(pytorch搭建模型)
大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用17-利用CrowdCountNet模型解决人群数量计算问题(pytorch搭建模型)。本篇文章,我将向大家展示如何使用CrowdCountNet这个神奇的工具,以及它是如何利用深度学习技术来解决复杂的人群计数问题。让我们一起进入这个充满活力和创新的世界,开启图像和视频中人群数量计算的新篇章!
目录
- 项目介绍
- 应用场景
- 人流监测和管理
- 安全防控
- 市场调研和决策支持
- 城市规划和交通管理
- 实战项目
- 数据准备
- 模型构建
- 模型训练
- 图片检测人群数量
- 视频检测人群数量
- 结论
1. 项目介绍
本文我将利用深度神经网络来解决一个现实中普遍存在的问题:如何准确计算图像和视频中的人群数量。当您走进拥挤的城市街头或繁忙的公共场所时,人群数量经常让人难以置信。然而,现在有了深度学习模型的帮助,我们可以轻松地通过计算机视觉来解决这个挑战。
CrowdCountNet是我们的主角,它是一种被广泛应用于图像识别和处理领域的深度学习模型。它背后的原理十分精巧,利用了神经网络的强大能力来理解和分析图像中的人群分布。这个模型通过学习大量的图像数据,自动捕捉到了各种人群密集度的模式和特征。
想象一下,当你看着一张摄像头拍摄的城市街景时,CrowdCountNet正在忙碌地工作着。它会逐像素地扫描整个图像,并识别每个像素点上是否存在人群。从细微的行人到人群聚集的区域,CrowdCountNet都能准确地捕捉到每个人的存在。
使用这个强大的深度学习模型,我们可以实现许多令人惊叹的功能。无论是为城市规划提供人流热图、帮助安保人员监控拥挤场所,还是为交通管理提供实时的交通流量信息,CrowdCountNet都能在不同领域发挥巨大作用。
2. 应用场景
2.1 人流监测和管理
在公共场所,例如商场、机场、火车站等,监测和管理人流量是至关重要的。我们的模型可以用于实时监测人流量,帮助管理者做出更有效的决策,比如调整人流方向,预防拥挤等。
在一个繁忙的购物中心,通过我们的人流监测系统,可以实时显示各个商店的人流量。商场管理员可以在控制中心的大屏幕上看到不同区域的人流状况,比如一楼的时尚区人流量饱和,而二楼的电子产品区人流相对稀少。管理员立即作出反应,调整楼梯和电梯的方向,引导顾客流向较空闲的区域,以缓解拥挤。
2.2 安全防控
在大型活动或集会中,通过实时监测人群数量,可以预防和控制安全事故的发生,及时制定疏散计划,提高人员安全。
想象一个音乐节现场,数以万计的观众聚集在一个开放的场地上。通过我们的人流监测系统,主办方能够实时获得观众的数量和密度数据。突然,系统发出警报,显示某个区域的人流超过了安全限制。主办方立刻启动紧急预案,引导人群有序撤离,避免发生踩踏事故。
2.3 市场调研和决策支持
商家可以通过监测店铺或某个区域的人流量,来评估其营销策略的效果,或者进行更准确的市场调研。
一家新开业的百货公司想要评估其广告宣传效果和吸引力。通过人流监测系统,他们可以统计每天进入商场的人数,并与营销活动的时间和内容进行对比。他们发现,当进行打折促销时,入场人数骤增,而在没有促销的日子里,人流量相对稀少。这为他们提供了有价值的市场调研数据,帮助他们更准确地评估促销策略的成效。
2.4 城市规划和交通管理
在城市规划和交通管理中,通过人群数量的监测,可以更好地理解和预测城市中的人流动态,从而更科学地进行城市规划和交通管理。
想象一座拥挤的大都市,上班高峰期大批人涌入地铁站。通过我们的人流监测系统,地铁管理部门可以实时了解不同地铁站的客流情况,并根据需求增加或减少列车班次。当一个地铁站即将达到容纳上限时,系统会自动发出警报,引导乘客选择其他线路或利用公共交通换乘,以减少人流压力。
2.5 相册与毕业生人数统计
通常毕业合影中有大批的人一起合作,我们要统计人数的话,基本都是人工去一个一个数出来,这样费时费力。现在利用模型直接统计合照人数,统计合照人数,判断是否学生来齐了。
3. 实战项目
在这个项目中,我们将首先讨论如何准备数据,然后构建和训练我们的模型,并最后使用我们的模型来检测人群数量。
3.1 数据准备
首先,我们需要准备一个包含大量标注人群数量的图像数据集。这可以是公开的人群数量数据集,也可以是自己收集并标注的数据集。
3.2 模型构建
然后,我们需要构建一个CrowdCountNet模型来学习如何从图像中预测人群数量。
import torch.nn as nn import torch import torch.nn.functional as F from torch.autograd import Variable from torch.nn.utils.weight_norm import weight_norm import math from collections import OrderedDict class CrowdCountNet(nn.Module): def __init__(self, leaky_relu=False, attn_weight=1, fix_domain=1, domain_center_model='', **kwargs): super(CrowdCountNet, self).__init__() self.criterion_attn = torch.nn.MSELoss(reduction='sum') self.domain_center_model = domain_center_model self.attn_weight = attn_weight self.fix_domain = fix_domain self.cosine = 1 self.conv1 = nn.Conv2d( 3, 64, kernel_size=3, stride=2, padding=1, bias=False) self.bn1 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM) self.conv2 = nn.Conv2d( 64, 64, kernel_size=3, stride=2, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM) self.relu = nn.ReLU(inplace=True) num_channels = 64 block = blocks_dict['BOTTLENECK'] num_blocks = 4 self.layer1 = self._make_layer(block, 64, num_channels, num_blocks) stage1_out_channel = block.expansion * num_channels # -- stage 2 self.stage2_cfg = {} self.stage2_cfg['NUM_MODULES'] = 1 self.stage2_cfg['NUM_BRANCHES'] = 2 self.stage2_cfg['BLOCK'] = 'BASIC' self.stage2_cfg['NUM_BLOCKS'] = [4, 4] self.stage2_cfg['NUM_CHANNELS'] = [40, 80] self.stage2_cfg['FUSE_METHOD'] = 'SUM' num_channels = self.stage2_cfg['NUM_CHANNELS'] block = blocks_dict[self.stage2_cfg['BLOCK']] num_channels = [ num_channels[i] * block.expansion for i in range(len(num_channels)) ] self.transition1 = self._make_transition_layer([stage1_out_channel], num_channels) self.stage2, pre_stage_channels = self._make_stage( self.stage2_cfg, num_channels) # -- stage 3 self.stage3_cfg = {} self.stage3_cfg['NUM_MODULES'] = 4 self.stage3_cfg['NUM_BRANCHES'] = 3 self.stage3_cfg['BLOCK'] = 'BASIC' self.stage3_cfg['NUM_BLOCKS'] = [4, 4, 4] self.stage3_cfg['NUM_CHANNELS'] = [40, 80, 160] self.stage3_cfg['FUSE_METHOD'] = 'SUM' num_channels = self.stage3_cfg['NUM_CHANNELS'] block = blocks_dict[self.stage3_cfg['BLOCK']] num_channels = [ num_channels[i] * block.expansion for i in range(len(num_channels)) ] self.transition2 = self._make_transition_layer(pre_stage_channels, num_channels) self.stage3, pre_stage_channels = self._make_stage( self.stage3_cfg, num_channels) last_inp_channels = np.int(np.sum(pre_stage_channels)) + 256 self.redc_layer = nn.Sequential( nn.Conv2d( in_channels=last_inp_channels, out_channels=128, kernel_size=3, stride=1, padding=1), nn.BatchNorm2d(128, momentum=BN_MOMENTUM), nn.ReLU(True), ) self.aspp = nn.ModuleList(aspp(in_channel=128)) # additional layers specfic for Phase 3 self.pred_conv = nn.Conv2d(128, 512, 3, padding=1) self.pred_bn = nn.BatchNorm2d(512) self.GAP = nn.AdaptiveAvgPool2d(1) # Specially for hidden domain # Set the domain for learnable parameters domain_center_src = np.load(self.domain_center_model) G_SHA = torch.from_numpy(domain_center_src['G_SHA']).view(1, -1, 1, 1) G_SHB = torch.from_numpy(domain_center_src['G_SHB']).view(1, -1, 1, 1) G_QNRF = torch.from_numpy(domain_center_src['G_QNRF']).view( 1, -1, 1, 1) self.n_domain = 3 self.G_all = torch.cat( [G_SHA.clone(), G_SHB.clone(), G_QNRF.clone()], dim=0) self.G_all = nn.Parameter(self.G_all) self.last_layer = nn.Sequential( nn.Conv2d( in_channels=128, out_channels=64, kernel_size=3, stride=1, padding=1), nn.BatchNorm2d(64, momentum=BN_MOMENTUM), nn.ReLU(True), nn.Conv2d( in_channels=64, out_channels=32, kernel_size=3, stride=1, padding=1), nn.BatchNorm2d(32, momentum=BN_MOMENTUM), nn.ReLU(True), nn.Conv2d( in_channels=32, out_channels=1, kernel_size=1, stride=1, padding=0), ) def _make_transition_layer(self, num_channels_pre_layer, num_channels_cur_layer): num_branches_cur = len(num_channels_cur_layer) num_branches_pre = len(num_channels_pre_layer) transition_layers = [] for i in range(num_branches_cur): if i < num_branches_pre: if num_channels_cur_layer[i] != num_channels_pre_layer[i]: transition_layers.append( nn.Sequential( nn.Conv2d( num_channels_pre_layer[i], num_channels_cur_layer[i], 3, 1, 1, bias=False), nn.BatchNorm2d( num_channels_cur_layer[i], momentum=BN_MOMENTUM), nn.ReLU(inplace=True))) else: transition_layers.append(None) else: conv3x3s = [] for j in range(i + 1 - num_branches_pre): inchannels = num_channels_pre_layer[-1] outchannels = num_channels_cur_layer[i] \ if j == i - num_branches_pre else inchannels conv3x3s.append( nn.Sequential( nn.Conv2d( inchannels, outchannels, 3, 2, 1, bias=False), nn.BatchNorm2d(outchannels, momentum=BN_MOMENTUM), nn.ReLU(inplace=True))) transition_layers.append(nn.Sequential(*conv3x3s)) return nn.ModuleList(transition_layers) def _make_layer(self, block, inplanes, planes, blocks, stride=1): downsample = None if stride != 1 or inplanes != planes * block.expansion: downsample = nn.Sequential( nn.Conv2d( inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False), nn.BatchNorm2d(planes * block.expansion, momentum=BN_MOMENTUM), ) layers = [] layers.append(block(inplanes, planes, stride, downsample)) inplanes = planes * block.expansion for i in range(1, blocks): layers.append(block(inplanes, planes)) return nn.Sequential(*layers) def _make_stage(self, layer_config, num_inchannels, multi_scale_output=True): num_modules = layer_config['NUM_MODULES'] num_branches = layer_config['NUM_BRANCHES'] num_blocks = layer_config['NUM_BLOCKS'] num_channels = layer_config['NUM_CHANNELS'] block = blocks_dict[layer_config['BLOCK']] fuse_method = layer_config['FUSE_METHOD'] modules = [] for i in range(num_modules): # multi_scale_output is only used last module if not multi_scale_output and i == num_modules - 1: reset_multi_scale_output = False else: reset_multi_scale_output = True modules.append( HighResolutionModule(num_branches, block, num_blocks, num_inchannels, num_channels, fuse_method, reset_multi_scale_output)) num_inchannels = modules[-1].get_num_inchannels() return nn.Sequential(*modules), num_inchannels def forward(self, x): x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x = self.conv2(x) x = self.bn2(x) x = self.relu(x) x = self.layer1(x) x_head_1 = x x_list = [] for i in range(self.stage2_cfg['NUM_BRANCHES']): if self.transition1[i] is not None: x_list.append(self.transition1[i](x)) else: x_list.append(x) y_list = self.stage2(x_list) x_list = [] for i in range(self.stage3_cfg['NUM_BRANCHES']): if self.transition2[i] is not None: x_list.append(self.transition2[i](y_list[-1])) else: x_list.append(y_list[i]) x = self.stage3(x_list) # Replace the classification heaeder with custom setting # Upsampling x0_h, x0_w = x[0].size(2), x[0].size(3) x1 = F.interpolate( x[1], size=(x0_h, x0_w), mode='bilinear', align_corners=False) x2 = F.interpolate( x[2], size=(x0_h, x0_w), mode='bilinear', align_corners=False) x = torch.cat([x[0], x1, x2, x_head_1], 1) # first, reduce the channel down x = self.redc_layer(x) pred_attn = self.GAP(F.relu_(self.pred_bn(self.pred_conv(x)))) pred_attn = F.softmax(pred_attn, dim=1) pred_attn_list = torch.chunk(pred_attn, 4, dim=1) aspp_out = [] for k, v in enumerate(self.aspp): if k % 2 == 0: aspp_out.append(self.aspp[k + 1](v(x))) else: continue # Using Aspp add, and relu inside for i in range(4): x = x + F.relu_(aspp_out[i] * 0.25) * pred_attn_list[i] bz = x.size(0) # -- Besides, we also need to let the prediction attention be close to visable domain # -- Calculate the domain distance and get the weights # - First, detach domains G_all_d = self.G_all.detach() # use detached G_all for calulcating pred_attn_d = pred_attn.detach().view(bz, 512, 1, 1) if self.cosine == 1: G_A, G_B, G_Q = torch.chunk(G_all_d, self.n_domain, dim=0) cos_dis_A = F.cosine_similarity(pred_attn_d, G_A, dim=1).view(-1) cos_dis_B = F.cosine_similarity(pred_attn_d, G_B, dim=1).view(-1) cos_dis_Q = F.cosine_similarity(pred_attn_d, G_Q, dim=1).view(-1) cos_dis_all = torch.stack([cos_dis_A, cos_dis_B, cos_dis_Q]).view(bz, -1) # bz*3 cos_dis_all = F.softmax(cos_dis_all, dim=1) target_attn = cos_dis_all.view(bz, self.n_domain, 1, 1, 1).expand( bz, self.n_domain, 512, 1, 1) * self.G_all.view( 1, self.n_domain, 512, 1, 1).expand( bz, self.n_domain, 512, 1, 1) target_attn = torch.sum( target_attn, dim=1, keepdim=False) # bz * 512 * 1 * 1 if self.fix_domain: target_attn = target_attn.detach() else: raise ValueError('Have not implemented not cosine distance yet') x = self.last_layer(x) x = F.relu_(x) x = F.interpolate( x, size=(x0_h * 2, x0_w * 2), mode='bilinear', align_corners=False) return x, pred_attn, target_attn def init_weights( self, pretrained='', ): logger.info('=> init weights from normal distribution') for m in self.modules(): if isinstance(m, nn.Conv2d): nn.init.normal_(m.weight, std=0.01) if m.bias is not None: nn.init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): nn.init.constant_(m.weight, 1) nn.init.constant_(m.bias, 0) if os.path.isfile(pretrained): pretrained_dict = torch.load(pretrained) logger.info(f'=> loading pretrained model {pretrained}') model_dict = self.state_dict() pretrained_dict = { k: v for k, v in pretrained_dict.items() if k in model_dict.keys() } for k, _ in pretrained_dict.items(): logger.info(f'=> loading {k} pretrained model {pretrained}') model_dict.update(pretrained_dict) self.load_state_dict(model_dict) else: assert 1 == 2- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
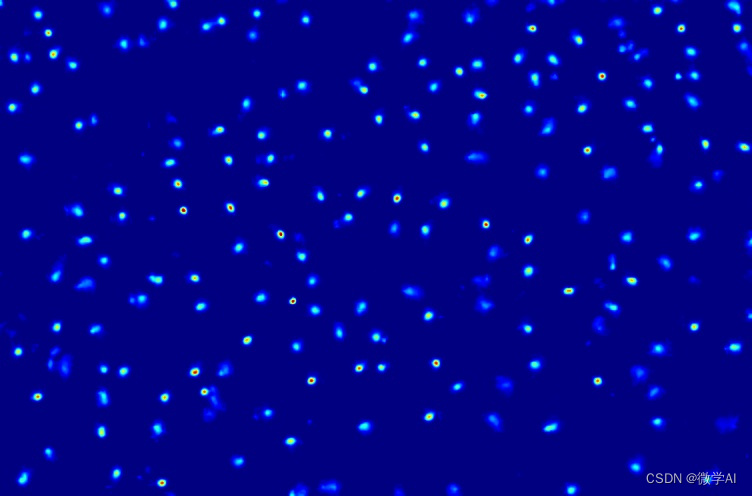
3.3 图片检测人群数量
接下来,我们加载已经训练好的模型进行预测,这里省略了中间复杂的过程,大家可以一键调用预测。
from modelscope.pipelines import pipeline from modelscope.utils.constant import Tasks from modelscope.outputs import OutputKeys from modelscope.utils.cv.image_utils import numpy_to_cv2img import cv2 crowd_model = pipeline(Tasks.crowd_counting,model='damo/cv_hrnet_crowd-counting_dcanet') imgs = '111.png' results = crowd_model(imgs) print('人数为:', int(results[OutputKeys.SCORES])) vis_img = results[OutputKeys.OUTPUT_IMG] vis_img = numpy_to_cv2img(vis_img) cv2.imwrite('result1.jpg', vis_img)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16

预测生成图:
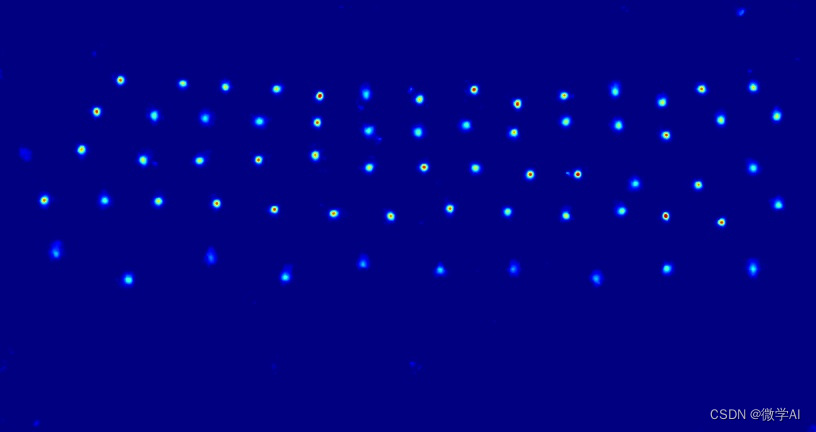
毕业合照人群计数:

预测生成图:
3.4 视频检测人群数量
对于视频,我们可以将其分解为一系列的图像帧,然后使用我们的模型来检测每一帧中的人群数量。
import cv2 from modelscope.outputs import OutputKeys def predict_video(video_path): cap = cv2.VideoCapture(video_path) while (cap.isOpened()): ret, frame = cap.read() if ret: gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) preds = crowd_model(gray) print(preds[OutputKeys.SCORES]) else: break cap.release() video_path = 'test.mp4' predict_video(video_path)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
4. 结论
在这个项目中,我们成功地使用深度学习模型来计算图像和视频中的人群数量。这个模型可以被广泛地应用于人流监测和管理、安全防控、市场调研和决策支持、城市规划和交通管理等领域。
-
相关阅读:
在 .NET MAUI 中如何更好地自定义控件
Python - 生成二维码、条形码
git Husky
codeforces (C++ Haunted House)
WebGL笔记:设置画布底色,从样式中解析颜色并设置画布底色,设置动态画布底色
python “groupby” 操作实践之格式化输出星期字符串
揭秘2023年最热门的跨境电商源码趋势,你不能错过的关键信息
5种促进业务增长的软件测试策略,我敢打赌你一定不知道?
uniCloud开发公众号:三、生成带参数二维码
hyperf的启动源码分析(二)——请求如何到达控制器
- 原文地址:https://blog.csdn.net/weixin_42878111/article/details/134442223