-
【物联网】BDS/GNSS 全星座定位导航模块——ATGM332D-5N
随着科技的不断进步,导航系统已经成为我们日常生活中不可或缺的一部分。传统的导航系统往往只提供基本的地图和路线规划,对于一些特殊需求或个性化定位并不够满足。全星座定位导航模块的出现,为我们带来了全新的导航体验。通过结合星座学说和个人特质,这一导航模块能够为用户提供更加个性化的定位服务,让每个人都能找到最适合自己的道路和方向。在本文中,我们将深入探讨全星座定位导航模块的原理、功能和优势,为大家带来一场关于未来导航系统的探索之旅。
一、功能描述
1.1 概述
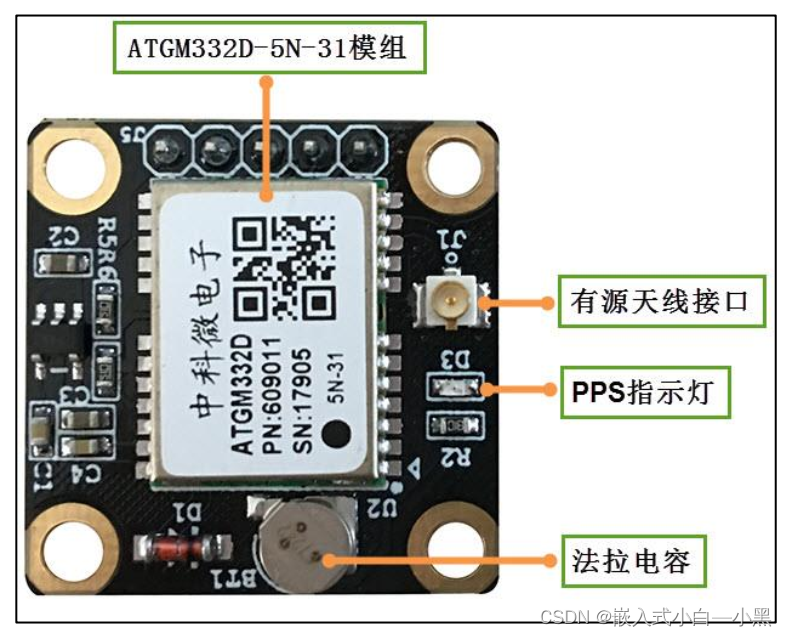
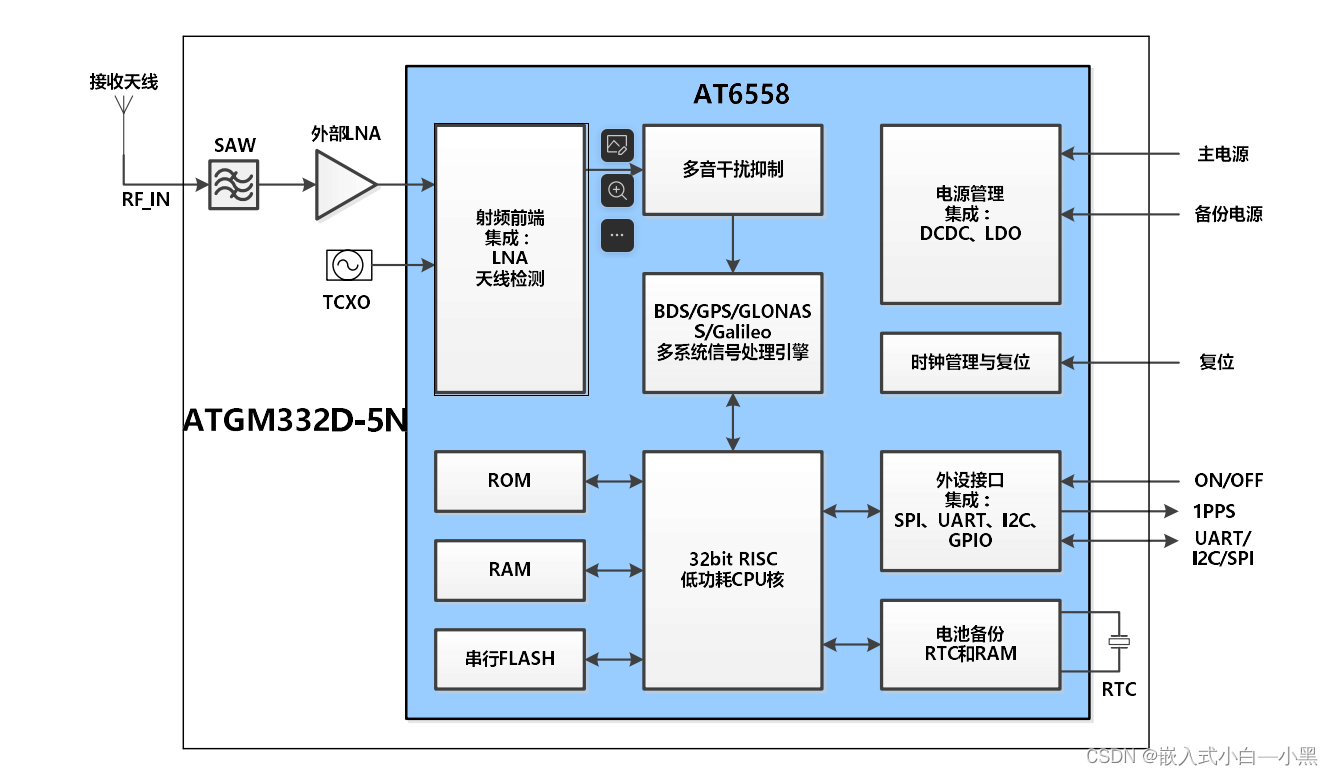
ATGM332D-5N 系列模块是 12X16 尺寸的高性能 BDS/GNSS 全星座定位导航模块系列的总称。该系列模块产品都是基于中科微第四代低功耗 GNSS SOC单芯片—AT6558,支持多种卫星导航系统,包括中国的 BDS(北斗卫星导航系统),美国的 GPS,俄罗斯的 GLONASS,欧盟的 GALILEO,日本的 QZSS 以及卫星增强系统 SBAS(WAAS,EGNOS,GAGAN,MSAS)。AT6558 是一款真正意义的六合一多模卫星导航定位芯片,包含 32 个跟踪通道,可以同时接收六个卫星导航系统的 GNSS 信号,并且实现联合定位、导航与授时。
ATGM332D-5N 系列模块具有高灵敏度、低功耗、低成本等优势,适用于车载导航、手持定位、可穿戴设备,可以直接替换 Ublox NEO 系列模块。
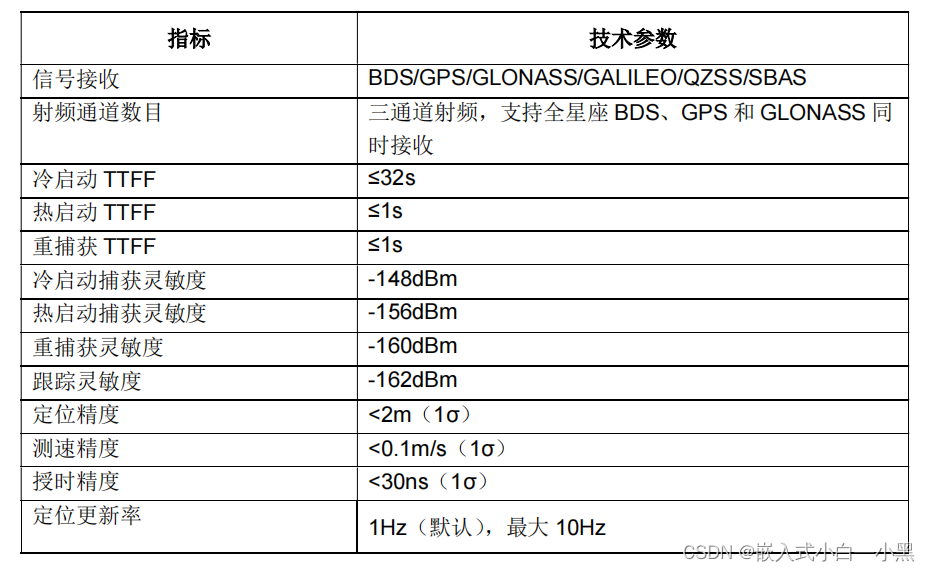
1.2 性能指标
- 出色的定位导航功能,支持 BDS/GPS/GLONASS 卫星导航系统的单系统定位,以及任意组合的多系统联合定位,并支持 QZSS 和 SBAS 系统
- 支持 A-GNSS
- 冷启动捕获灵敏度:-148dBm
- 跟踪灵敏度:-162dBm
- 定位精度:2.5 米(CEP50)
- 首次定位时间:32 秒
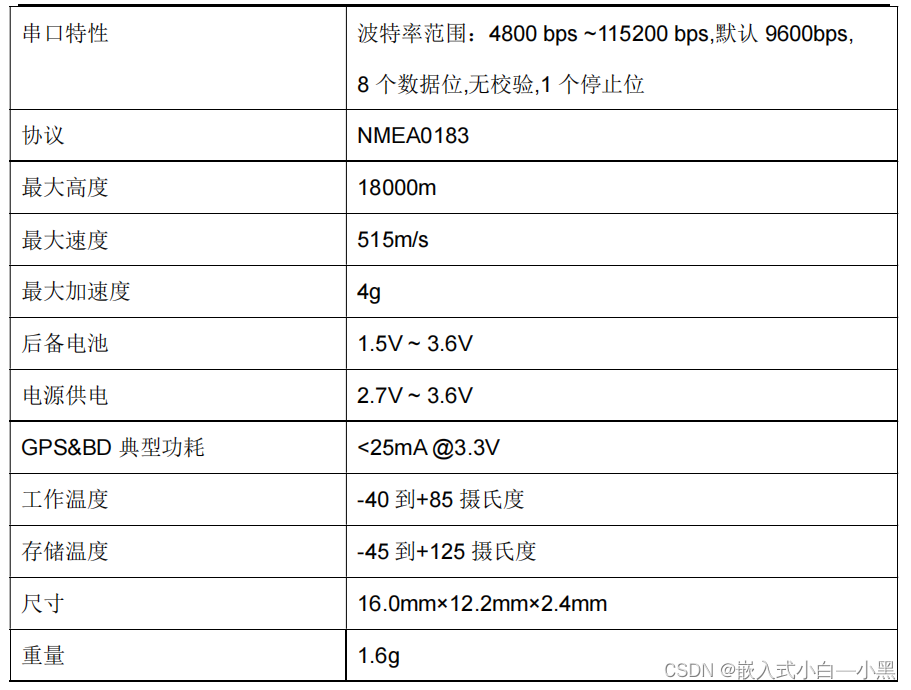
- 低功耗:连续运行 <25mA(@3.3V)
- 内置天线检测及天线短路保护功能
1.3 模块功能框图
1.4 应用领域
- 车载定位与导航
- 手机、平板电脑,手持设备
- 嵌入式定位设备
- 可穿戴设备
1.5 辅助 GNSS(Assisted GNSS、AGNSS)
ATGM332D-5N 系列模块全部支持辅助 GNSS (AGNSS)功能。AGNSS 可以为接收机提供定位必需的辅助信息,比如电文,粗略位置和时间。无论是在强信号还是弱信号环境,这些信息可以显著的缩短首次定位时间。
1.6 输出协议
ATGM332D-5N 系列模块通过 UART 作为主要输出通道,按照 NMEA0183 的协议格式输出。
UART传送门:【物联网】一文读懂UART通信协议
1.7 FLASH
ATGM331C-5N 系列模块配备 Flash,可以通过在线升级功能,更新定位功能与算法。这种配置功能,可以让客户自主配置定位更新率,获得适用的低功耗;可以让客户及时更新全球多模定位的最新优化进展;可以让客户增加新的控制功能,如定位记录,规则的地理围栏,自定义的输出格式。
1.8 天线
ATGM332D-5N 系列模块支持有源天线与无源天线。
1.9 上位机工具
中科微提供《GNSSToolKit》Lite 版软件包(Windows 版本、Android 版本),用于定位输出解析与工作模式配置。
中科微提供《UBF 串口升级工具》软件包(Windows 版本),用于基于 PC 的在线升级工具。基于设备的在线升级程序需客户自己开发。
二、技术描述
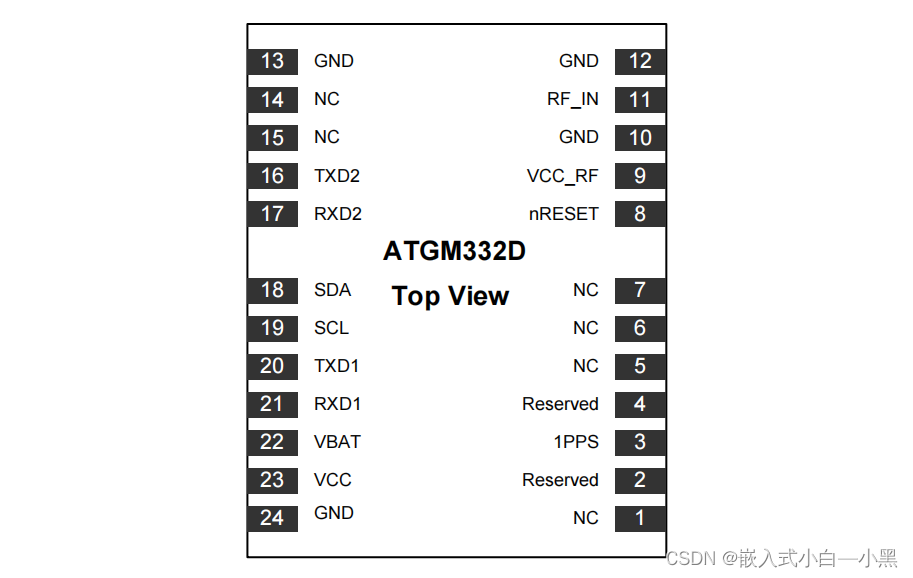
2.1 PIN 排列图
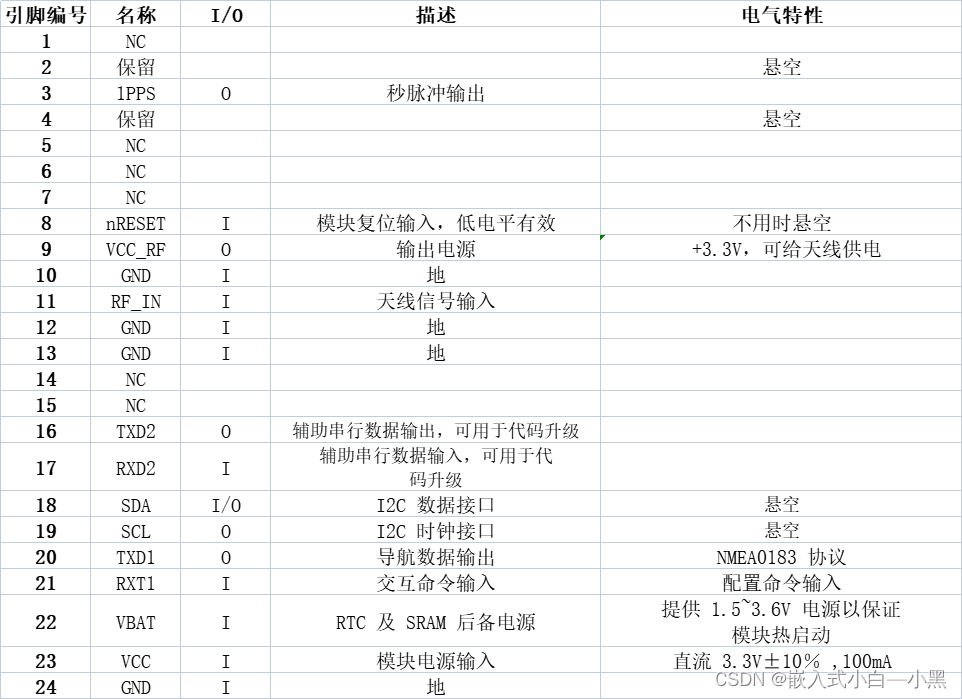
2.2 管脚定义
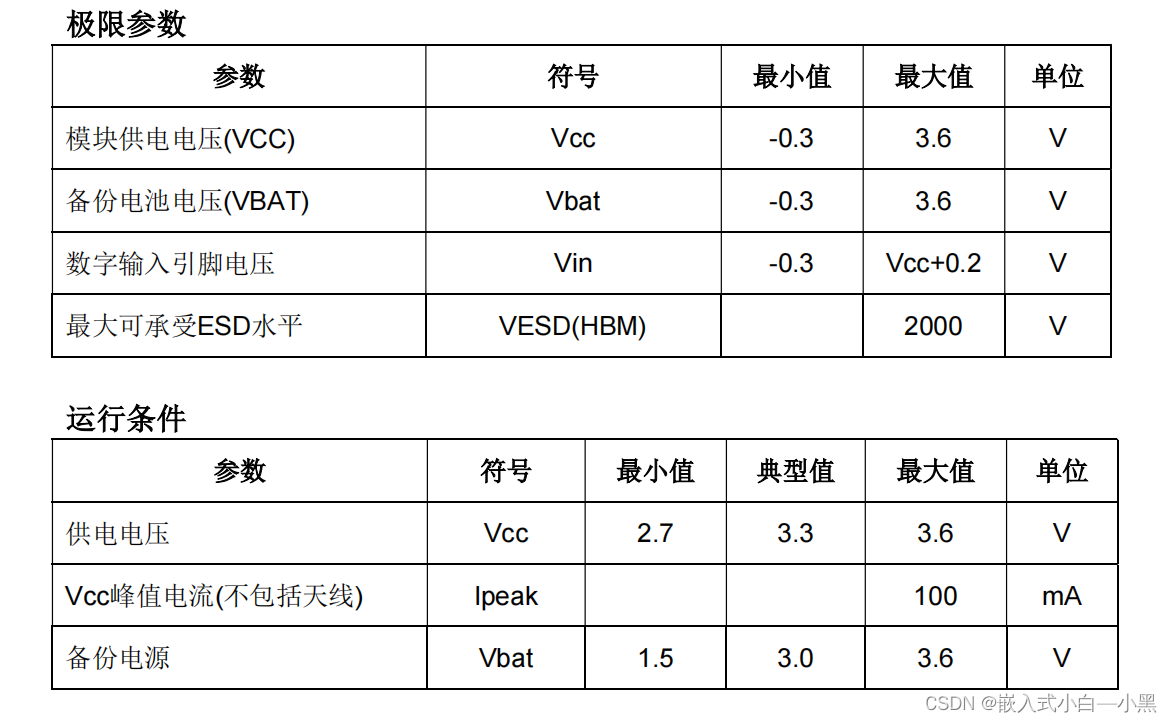
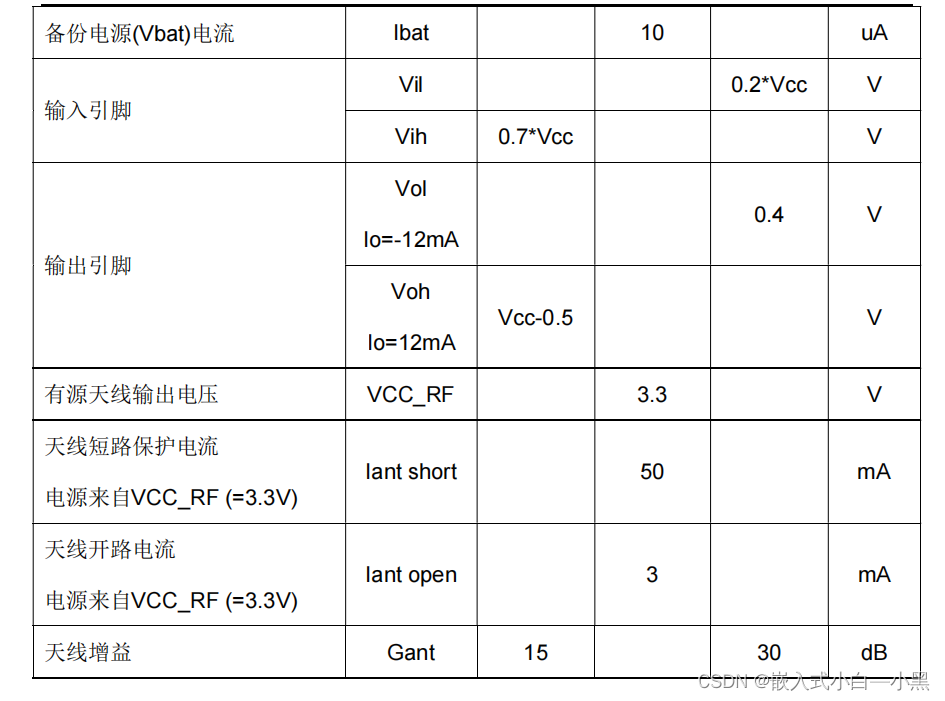
2.3 电气参数
2.4 技术规范
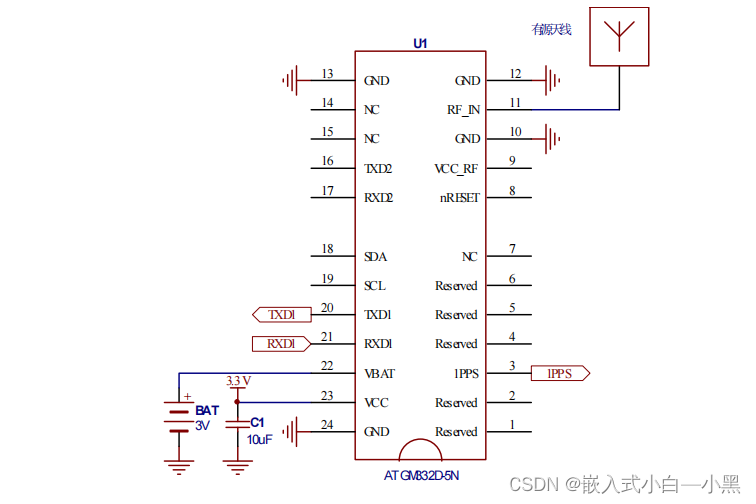
2.5 模块应用电路
2.5.1 有源天线应用方案(模块内部提供天线电源、天线检测及短路保护)
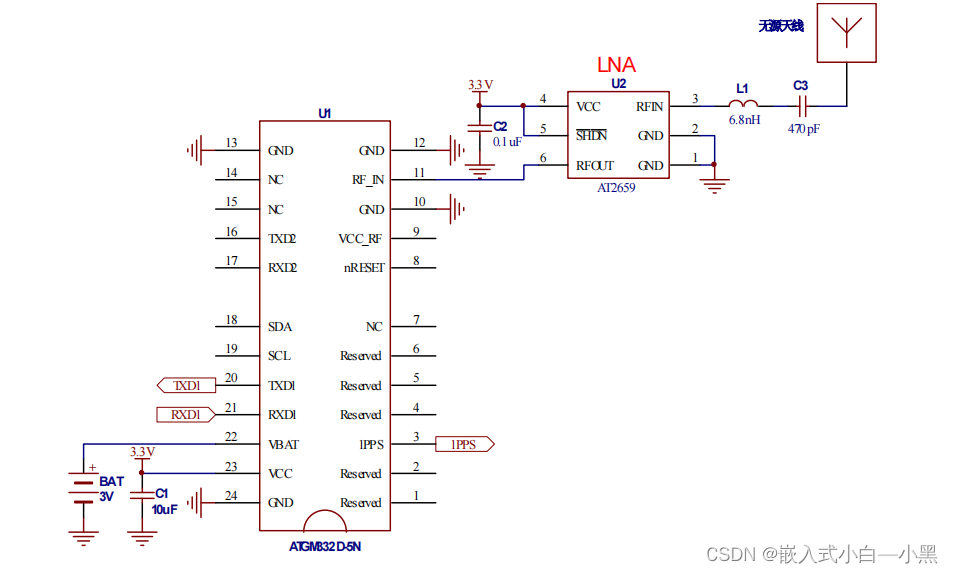
2.5.2 无源天线应用方案(模块 RF_IN 输入端增加一级 LNA)
2.6 模块使用注意事项
- 采用低纹波的 LDO 电源,将纹波控制在 50mVpp 以内。
- 模块附近尽量不要走其它频率高、幅度大的数字信号。模块下面全部以地线填充为佳。
- 天线接口尽量靠近模块的 RF 输入引脚,并注意 50 欧姆的阻抗匹配。
- 模块本身具有有源天线接入、拔出、短路检测电路,同时在天线意外短路时,对天线的供电电流进行限制(50mA),起到保护的作用。在上述 3 种天线端口状态发生变化时,可以从串口输出相应的信息。如
$GPTXT,01,01,01,ANTENNA SHORT*63 $GPTXT,01,01,01,ANTENNA OPEN*25 $GPTXT,01,01,01,ANTENNA OK*35- 1
- 2
- 3
2.7 静电防护:
ATGM332D-5N 模块系列,属静电敏感器件。经常性的静电接触会导致模块产生意外的损坏。除了按照标准的静电防护要求操作外,如下几点需尽量遵循:
- 除非 PCB GND 已经很好的接地,否则接触模块的第一位置应该是PCB GND。
- 连接天线的时候,请首先连接 GND,再连信号线。
- 接触 RF 部分电路时,请不要接触充电电容,请远离可产生静电的器件与设备,如介质天线,同轴电线,电烙铁等。
- 为避免通过射频输入端进行电荷放电,请不要接触天线介质裸露部分。对于可能出现接触天线介质裸露的情况,需要在设计中增加防静电保护电路。
- 在焊接与射频输入端相连接的连接器,天线,请确保使用无静电焊枪。
三、模块开发
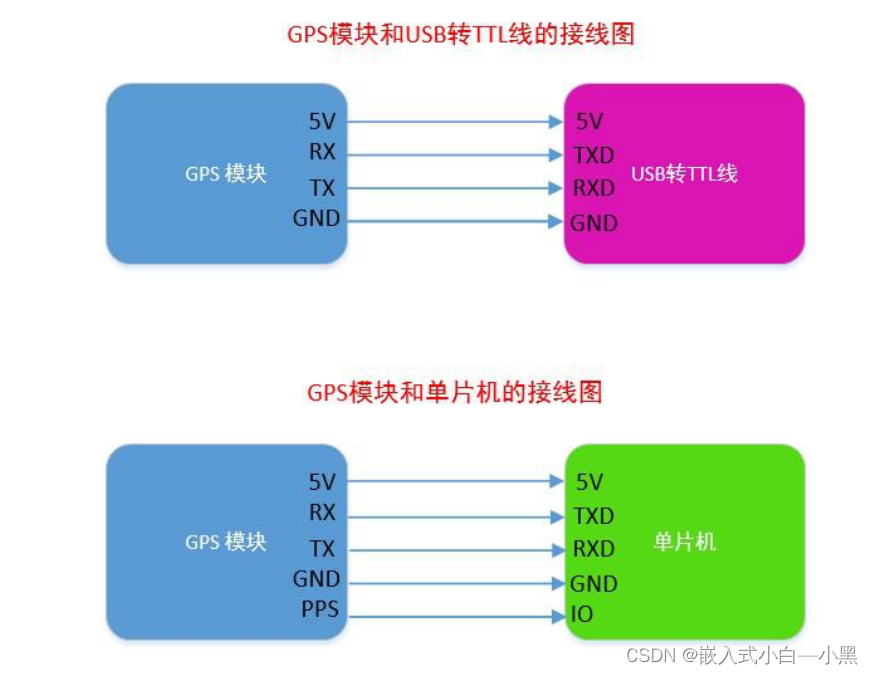
3.1 模块连接线
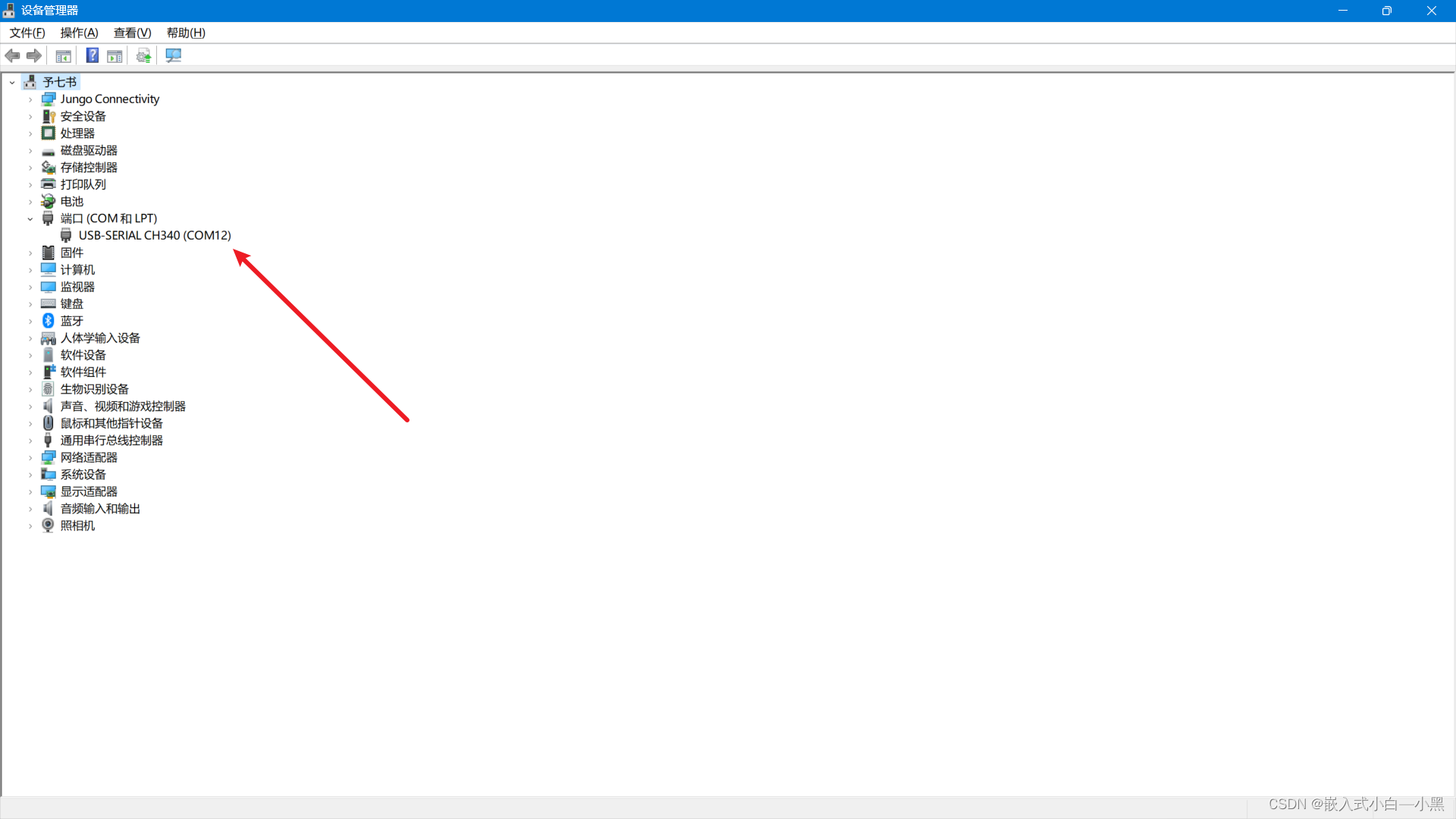
3.2 安装驱动
连接好了线之后,安装下 ch340 的驱动,出现串口号。
3.3 数据解析
测试最好是带电脑到户外空旷地进行,若是把天线放在阳台外面的话,有一定几率定位失败,这个受楼距,遮挡物等因素影响。空旷地首次定位一般是一分钟以内。板载 LED 保持一定的频率闪烁证明定位成功了,我们用串口来看下数据,波特率默认是 9600。
定位成功后 用串口显示数据:
$GNGGA,084852.000,2236.9453,N,11408.4790,E,1,05,3.1,89.7,M,0.0,M,,*48 $GNGLL,2236.9453,N,11408.4790,E,084852.000,A,A*4C $GPGSA,A,3,10,18,31,,,,,,,,,,6.3,3.1,5.4*3E $BDGSA,A,3,06,07,,,,,,,,,,,6.3,3.1,5.4*24 $GPGSV,3,1,09,10,78,325,24,12,36,064,,14,26,307,,18,67,146,27*71 $GPGSV,3,2,09,21,15,188,,24,13,043,,25,55,119,,31,36,247,30*7F $GPGSV,3,3,09,32,42,334,*43 $BDGSV,1,1,02,06,68,055,27,07,82,211,31*6A $GNRMC,084852.000,A,2236.9453,N,11408.4790,E,0.53,292.44,141216,,,A*75 $GNVTG,292.44,T,,M,0.53,N,0.98,K,A*2D $GNZDA,084852.000,14,12,2016,00,00*48 $GPTXT,01,01,01,ANTENNA OK*35- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
我们来一步步解读下数据
数据里面我们看到 三种数据类型GN、GP、BD 分别代表双模模式、GPS 模式、北斗模式。NMEA0183 协议 帧格式内容可以参考以下几个表格:
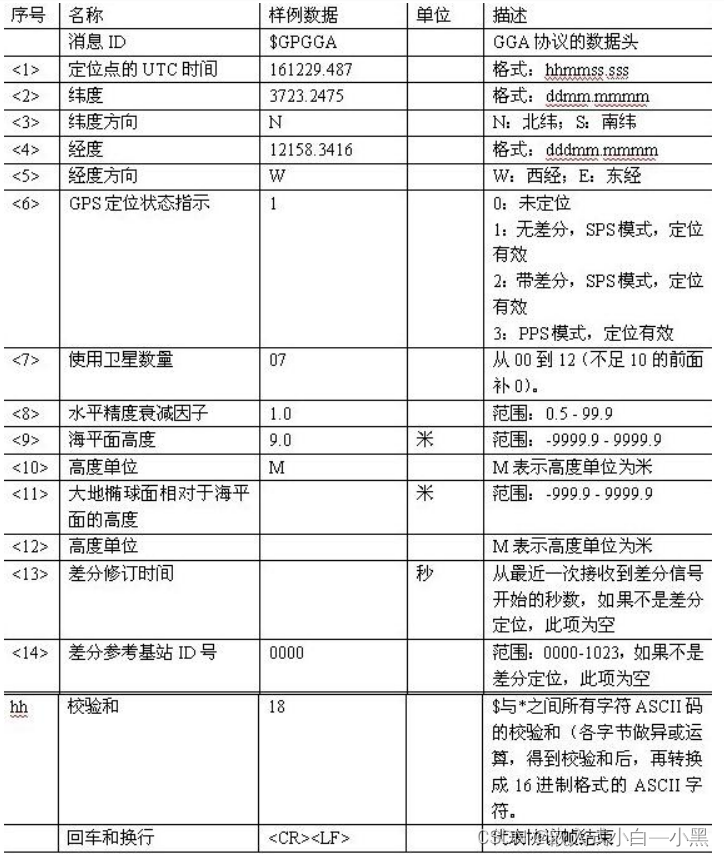
(1) $GPGGA (GPS 定位信息)
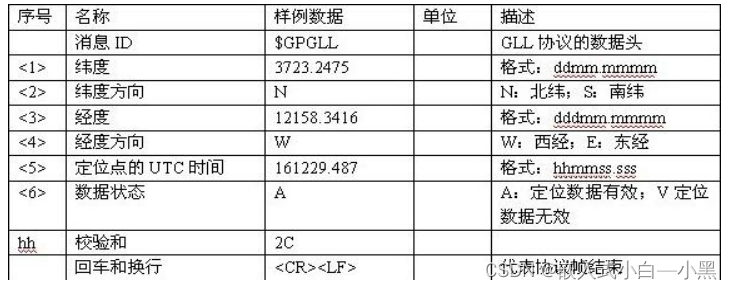
(2) $GPGLL (地理定位信息)
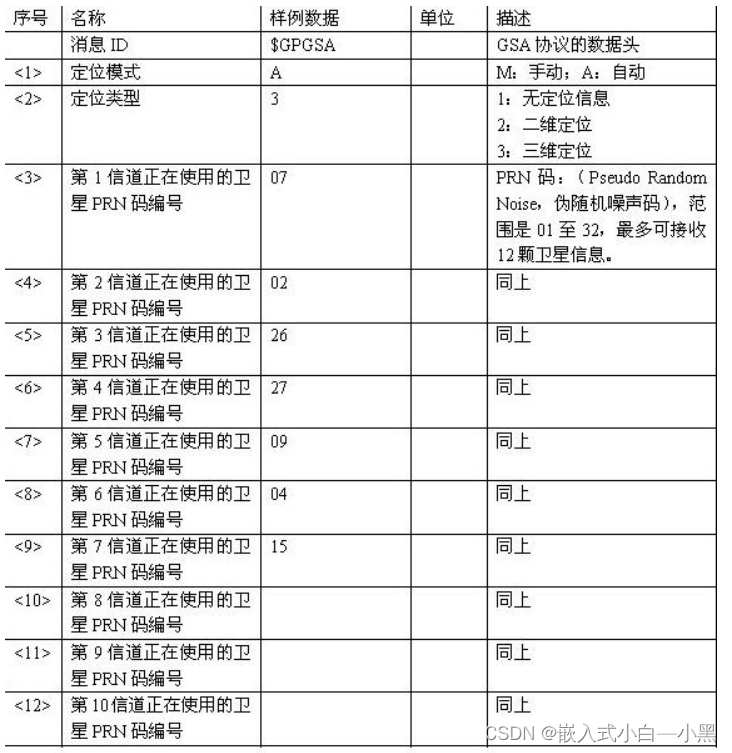
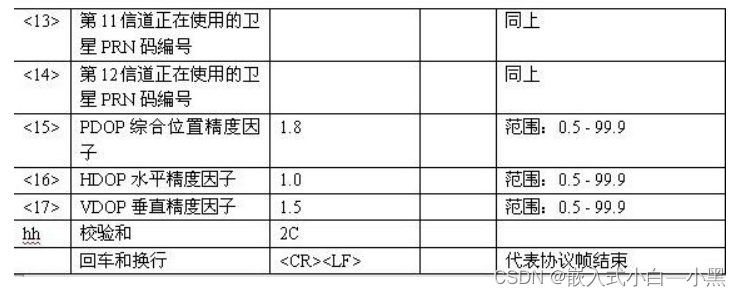
(3)$GPGSA (当前卫星信息)
(4) $GPGSV(可见卫星信息)

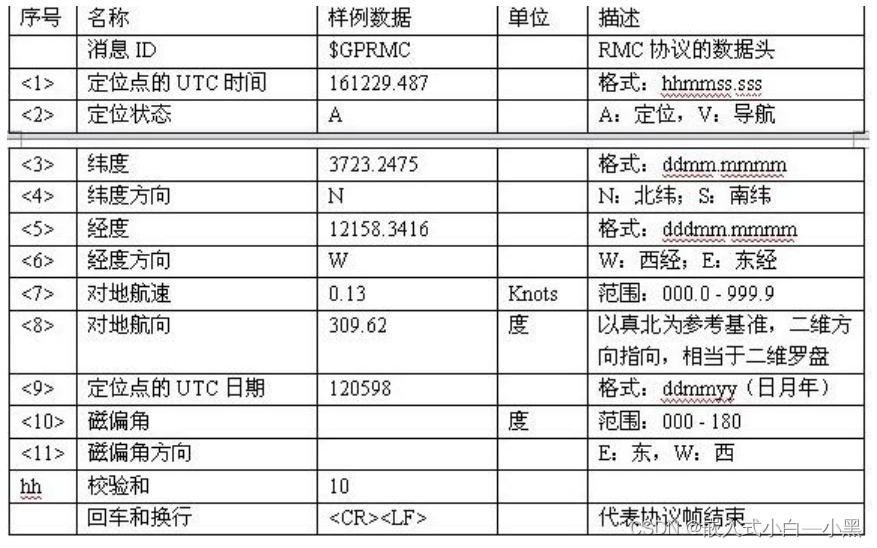
(5) $GPRMC(最简定位信息)
(6) $GPVTG(地面速度信息)

(7)天线状态输出
$GPTXT,01,01,01,ANTENNA OK*35- 1
Ok 代表天线已经检测到,open 代表天线断开。
关于 UTC 时间和当前北京时间的计算
$GNGGA,084852.000,2236.9453,N,11408.4790,E,1,05,3.1,89.7,M,0.0,M,,*48- 1
所看到的就是 UTC 时间,格式是 hhmmss.sss ,小数点后三位秒忽略,那就 08 点 48 分 52秒。
UTC + 时区差 = 本地时间
时区差东为正,西为负。在此,把东八区时区差记为 +08, 所以北京时间是 16 点 48 分 5 秒关于经纬度的换算
关于经纬度的换算
$GNRMC,084852.000,A,2236.9453,N,11408.4790,E,0.53,292.44,141216,,,A*75- 1
数据格式:度分格式 换算成百度 谷歌地图的格式
纬度:ddmm.mmmm 北纬 2236.9453 22+(36.9453/60)= 22.615755
经度:dddmm.mmmm 东经 11408.4790 114+(08.4790/60)=114.141317如果想转换成 度分秒的 格式
北纬 2236.9453 =22 度 36 分 0.9453x60 秒 = 22 度 36 分 56.718 秒
东经 11408.4790=114 度 8 分 0.4790x60 秒=114 度 8 分 28.74 秒
四、热启动 温启动 冷启动
冷启动是指在一个陌生的环境下启动 GPS 直到 GPS 和周围卫星联系并且计算出坐标的启动过程。以下几种情况开机均属冷启动:
- 初次使用时;
- 电池耗尽导致星历信息丢失时;
- 关机状态下将接收机移动 1000 公里以上距离。
也就是说冷启动是通过硬件方式的强制性启动,因为距离上次操作 GPS 已经把内部的定位信息清除掉,GPS 接收机失去卫星参数,或者已经存在的参数和实际接收到卫星参数相差太多,导致导航仪无法工作,必须从新获得卫星提供的坐标数据,所以说车辆从地库里启动导航百分百算冷启动,这也是从地库出来搜星时间长的原因。
温启动是指距离上次定位时间超过 2 个小时的启动,搜星定位时间介于冷启动和热启动之间。如果您前一日使用过 GPS 定位,那么次日的第一次启动就属于温启动,启动后会显示上次的位置信息。因为上次关机前的经纬度和高度已知,但由于关机时间过长,星历发生了变化,以前的卫星接受不到了,参数中的若干颗卫星已经和 GPS 接收机失去了联系,需要继续搜星补充位置信息,所以搜星的时间要长于热启动,短于冷启动。
热启动是指在上次关机的地方没有过多移动启动 GPS,但距离上次定位时间必须小于 2 个小时,通过软件的方式,进行一些启动前的保存和关闭等准备工作后的启动。
-
相关阅读:
大数定律与中心极限定理
如何避免无效的沟通
中国SSD产业突围有多难?除了技术“瓶颈”还有哪里挑战?
开放式耳机选择什么品牌?六款口碑好爆的开放式耳机盘点
DataGridView控件的使用
k8s提交spark应用消费kafka数据写入elasticsearch7
【无标题】C++库编译
flink集群与资源@k8s源码分析-集群
面试题常考:LRU缓存
windows2003 IIS6.0解析漏洞
- 原文地址:https://blog.csdn.net/Goforyouqp/article/details/134407598