-
图像相似度对比方法
1.哈希方法,其中包括均值哈希、插值哈希、感知哈希方法。计算出图片的哈希值,一般使用汉明
距离计算两个图片间的差距。
2.直方图算法,其中包括灰度直方图算法,RGB直方图算法,
3.灰度图算法:MSE、SSIM、图像相似度算法
4.余弦相似性、欧氏距离
5.MD5
一、直方图算法
方法描述:按照某种距离度量的标准对两幅图像的直方图进行相似度的测量。
- 优点:计算量比较小。
- 缺点: 直方图反应的是图像灰度值得概率分布,并没有图像的空间位置信息在里面,因此,会出现误判;比如纹理结构相同,但明暗不同的图像,应该相似度很高,但实际结果是相似度很低,而纹理结构不同,但明暗相近的图像,相似度却很高。
分析:两幅图像之间的距离度量,采用的是巴氏距离或者归一化相关系数,这种用分析数学向量的方法去分析图像本身就是一个很不好的办法。
(1)单通道直方图
- def histogram(image1, image2):
- # 灰度直方图算法
- # 计算单通道的直方图的相似值
- hist1 = cv2.calcHist([image1], [0], None, [256], [0.0, 255.0])
- hist2 = cv2.calcHist([image2], [0], None, [256], [0.0, 255.0])
- # 计算直方图的重合度
- degree = 0
- for i in range(len(hist1)):
- if hist1[i] != hist2[i]:
- degree = degree + \
- (1 - abs(hist1[i] - hist2[i]) / max(hist1[i], hist2[i]))
- else:
- degree = degree + 1
- degree = degree / len(hist1)
- return degree
(2)RGB三通道直方图
- def Multiparty_histogram(self, image1, image2, size=(256, 256)):
- # RGB每个通道的直方图相似度
- # 将图像resize后,分离为RGB三个通道,再计算每个通道的相似值
- image1 = cv2.resize(image1, size)
- image2 = cv2.resize(image2, size)
- sub_image1 = cv2.split(image1)
- sub_image2 = cv2.split(image2)
- sub_data = 0
- for im1, im2 in zip(sub_image1, sub_image2):
- sub_data += self.calculate(im1, im2)
- sub_data = sub_data / 3
- return sub_data
二、灰度图算法:利用灰度图的值、均值、方差计算图像的差异性
(1)MSE(Mean Squared Error)均方误差:针对单通道灰度图
对于两个m×n的单通道图像I和K,它们的均方误差可定义为:
缺点:当差值大于1时,会放大误差;而当差值小于1时,则会缩小误差,这是平方运算决定的。MSE对于较大的误差(>1)给予较大的惩罚,较小的误差(<1)给予较小的惩罚。也就是说,对离群点比较敏感,受其影响较大。
(2)SSIM(structural similarity)结构相似性:针对单通道灰度图
SSIM(structural similarity),结构相似性,是一种衡量两幅图像相似度的指标。
SSIM公式基于样本x和y之间的三个比较衡量:亮度 (luminance)、对比度 (contrast) 和结构 (structure)。

𝝁𝒙为均值, 𝝈𝒙 为方差, 𝝈𝒙𝒚 表示协方差。

常数𝑪𝟏, 𝑪𝟐, 𝑪𝟑是为了避免当分母为 0 时造成的不稳定问题。
在实际应用中,可以利用滑动窗将图像分块,令分块总数为N,考虑到窗口形状对分块的影响,采用高斯加权计算每一窗口的均值、方差以及协方差,然后计算对应块的结构相似度SSIM,最后将平均值作为两图像的结构相似性度量,即平均结构相似性SSIM。
- def contrast_image(imageA, imageB):
- """
- 对比两张图片的相似度,相似度等于1 完美匹配
- :param imageA:
- :param imageB:
- :return:
- """
- imageA = cv2.imread(imageA)
- imageB = cv2.imread(imageB)
- grayA = cv2.cvtColor(imageA, cv2.COLOR_BGR2GRAY)
- grayB = cv2.cvtColor(imageB, cv2.COLOR_BGR2GRAY)
- # 计算两个灰度图像之间的结构相似度指数,相似度等于1完美匹配
- (score, diff) = structural_similarity(grayA, grayB, full=True)
- diff = (diff * 255).astype("uint8")
- print("SSIM:{}".format(score))
- return score, diff
skimage.metrics包下的SSIM算法
def structural_similarity(*, im1, im2,
win_size=None, gradient=False, data_range=None,
multichannel=False, gaussian_weights=False,
full=False, **kwargs)返回值:
mssim—平均结构相似度
grad—结构相似性梯度 (gradient=True)
S—结构相似性图像(full=True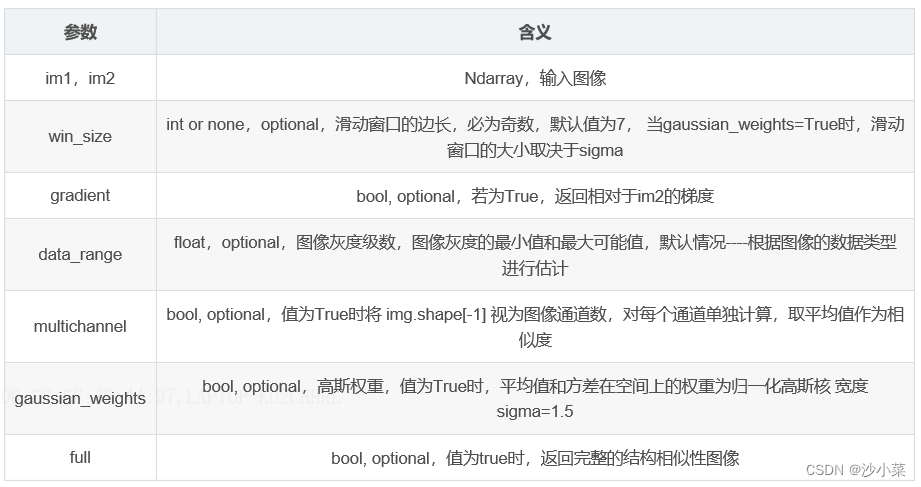
(3)图片相似度算法(对像素求方差并比对)的学习
步骤:
1)缩放图片
将需要处理的图片所放到指定尺寸,缩放后图片大小由图片的信息量和复杂度决定。譬如,一些简单的图标之类图像包含的信息量少,复杂度低,可以缩放小一点。风景等复杂场景信息量大,复杂度高就不能缩放太小,容易丢失重要信息。根据自己需求,弹性的缩放。在效率和准确度之间维持平衡。
2)灰度处理
通常对比图像相似度和颜色关系不是很大,所以处理为灰度图,减少后期计算的复杂度。如果有特殊需求则保留图像色彩。
3)计算平均值
此处开始,与传统的哈希算法不同:分别依次计算图像每行像素点的平均值,记录每行像素点的平均值。每一个平均值对应着一行的特征。
4)计算方差
对得到的所有平均值进行计算方差,得到的方差就是图像的特征值。方差可以很好的反应每行像素特征的波动,既记录了图片的主要信息。
5)比较方差
经过上面的计算之后,每张图都会生成一个特征值(方差)。到此,比较图像相似度就是比较图像生成方差的接近成程度。
一组数据方差的大小可以判断稳定性,多组数据方差的接近程度可以反应数据波动的接近程度。我们不关注方差的大小,只关注两个方差的差值的大小。方差差值越小图像越相似!(4)PSNR
- def PSNR(img1, img2):
- mse = np.mean((img1/255. - img2/255.) ** 2)
- if mse == 0:
- return 100
- PIXEL_MAX = 1
- return 20 * math.log10(PIXEL_MAX / math.sqrt(mse))
三、哈希算法
计算图片的哈希表示后,利用汉明距离计算两张图片的差异
哈希相似度
实现图片相似度比较的hash算法有三种:均值哈希算法(AHash),差值哈希算法(DHash),感知哈希算法 (PHash)。(图片转成哈希表示后,用汉明距离计算两个图片的差距)
- aHash:平均值哈希。速度比较快,但是常常不太精确。
- pHash:感知哈希。精确度比较高,但是速度方面较差一些。
- dHash:差异值哈希。精确度较高,且速度也非常快。
(1)均值哈希算法(AHash)
具体步骤:
- 缩小尺寸:将图片缩小到8x8的尺寸,总共64个像素。这一步的作用是去除图片的细节,只保留结构、明暗等基本信息,摒弃不同尺寸、比例带来的图片差异。
- 简化色彩:将缩小后的图片,转为64级灰度。也就是说,所有像素点总共只有64种颜色。
- 计算平均值:计算所有64个像素的灰度平均值
- 比较像素的灰度:将每个像素的灰度,与平均值进行比较。大于或等于平均值,记为1;小于平均值,记为0。
- 计算哈希值:将上一步的比较结果,组合在一起,就构成了一个64位的整数,这就是这张图片的指纹。组合的次序并不重要,只要保证所有图片都采用同样次序就行了。
分析: 均值哈希算法计算速度快,不受图片尺寸大小的影响,但是缺点就是对均值敏感,例如对图像进行伽马校正或直方图均衡就会影响均值,从而影响最终的hash值。
- def aHash(img):
- # 平均值哈希算法
- # 缩放为8*8
- img = cv2.resize(img, (8, 8))
- # 转换为灰度图
- gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- # s为像素和初值为0,hash为hash值初值为''
- s = 0
- hash= ''
- # 遍历累加求像素和
- for i in range(8):
- for j in range(8):
- s = s + gray[i, j]
- # 求平均灰度
- avg = s / 64
- # 灰度大于平均值为1相反为0生成图片的hash值
- for i in range(8):
- for j in range(8):
- if gray[i, j] > avg:
- hash_str = hash + '1'
- else:
- hash_str = hash + '0'
- return hash_str
(2)感知哈希算法 (PHash)
感知哈希算法是一个比均值哈希算法更为健壮的一种算法,与均值哈希算法的区别在于感知哈希算法是通过DCT(离散余弦变换)来获取图片的低频信息。
具体步骤:
- 缩小尺寸:pHash以小图片开始,但图片大于8x8,32x32是最好的。这样做的目的是简化了DCT的计算,而不是减小频率。
- 简化色彩:将图片转化成灰度图像,进一步简化计算量。
- 计算DCT:计算图片的DCT变换,得到32x32的DCT系数矩阵。
- 缩小DCT:虽然DCT的结果是32x32大小的矩阵,但我们只要保留左上角的8x8的矩阵,这部分呈现了图片中的最低频率。
- 计算平均值:如同均值哈希一样,计算DCT的均值。
- 计算hash值:这是最主要的一步,根据8x8的DCT矩阵,设置0或1的64位的hash值,大于等于DCT均值的设为”1”,小于DCT均值的设为“0”。组合在一起,就构成了一个64位的整数,这就是这张图片的指纹。
分析: 结果并不能告诉我们真实性的低频率,只能粗略地告诉我们相对于平均值频率的相对比例。只要图片的整体结构保持不变,hash结果值就不变。能够避免伽马校正或颜色直方图被调整带来的影响。对于变形程度在25%以内的图片也能精准识别。
- def pHash(img):
- # 感知哈希算法
- # 缩放32*32
- img = cv2.resize(img, (32, 32)) # , interpolation=cv2.INTER_CUBIC
- # 转换为灰度图
- gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- # 将灰度图转为浮点型,再进行dct变换,cv2.dct()是离弦余弦变换
- dct = cv2.dct(np.float32(gray))
- # opencv实现的掩码操作
- dct_roi = dct[0:8, 0:8]
- hash = []
- avreage = np.mean(dct_roi)
- for i in range(dct_roi.shape[0]):
- for j in range(dct_roi.shape[1]):
- if dct_roi[i, j] > avreage:
- hash.append(1)
- else:
- hash.append(0)
- return hash
(3)差值哈希算法(DHash)
比pHash,dHash的速度要快的多,相比aHash,dHash在效率几乎相同的情况下的效果要更好,它是基于渐变实现的。
主要步骤:
- 缩小尺寸:收缩到8x9(高x宽)的大小,一遍它有72的像素点
- 转化为灰度图:把缩放后的图片转化为256阶的灰度图。
- 计算差异值:dHash算法工作在相邻像素之间,这样每行9个像素之间产生了8个不同的差异,一共8行,则产生了64个差异值
- 获得指纹:如果左边的像素比右边的更亮,则记录为1,否则为0
- def dHash(img):
- # 差值哈希算法
- # 缩放8*8
- img = cv2.resize(img, (9, 8))
- # 转换灰度图
- gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
- hash = ''
- # 每行前一个像素大于后一个像素为1,相反为0,生成哈希
- for i in range(8):
- for j in range(8):
- if gray[i, j] > gray[i, j + 1]:
- hash_str = hash + '1'
- else:
- hash_str = hash + '0'
- return hash_str
汉明距离计算两个图像的哈希差值
- def cmpHash(hash1,hash2):
- n=0
- #hash长度不同则返回-1代表传参出错
- if len(hash1)!=len(hash2):
- return -1
- #遍历判断
- for i in range(len(hash1)):
- #不相等则n计数+1,n最终为相似度
- if hash1[i]!=hash2[i]:
- n=n+1
- return n
MD5
粗暴的md5比较 返回是否完全相同
- def md5_similarity(img1_path, img2_path):
- file1 = open(img1_path, "rb")
- file2 = open(img2_path, "rb")
- md = hashlib.md5()
- md.update(file1.read())
- res1 = md.hexdigest()
- md = hashlib.md5()
- md.update(file2.read())
- res2 = md.hexdigest()
- return res1 == res2
余弦相似度
把图片表示成一个向量,两个向量夹角的余弦值作为衡量两个个体间差异的大小。
欧氏距离
衡量的是多维空间中各个点之间的绝对距离。
借助三维坐标系来看下欧氏距离和余弦距离的区别:
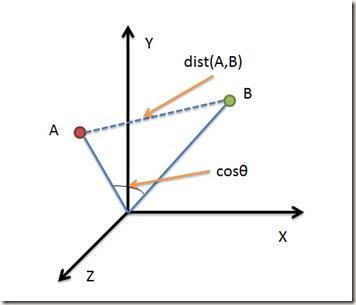
从上图可以看出,
欧氏距离衡量的是空间各点的绝对距离,跟各个点所在的位置坐标直接相关;
余弦距离衡量的是空间向量的夹角,更加体现在方向上的差异,而不是位置。
如果保持A点位置不变,B点朝原方向远离坐标轴原点,那么这个时候余弦距离 cos是保持不变的(因为夹角没有发生变化),而A、B两点的距离显然在发生改变,这就是欧氏距离和余弦距离之间的不同之处。
欧氏距离和余弦距离各自有不同的计算方式和衡量特征,因此它们适用于不同的数据分析模型:
欧氏距离能够体现个体数值特征的绝对差异,所以更多的用于需要从维度的数值大小中体现差异的分析,如使用用户行为指标分析用户价值的相似度或差异。
余弦距离更多的是从方向上区分差异,而对绝对的数值不敏感,更多的用于使用用户对内容评分来区分兴趣的相似度和差异,同时修正了用户间可能存在的度量标准不统一的问题(因为余弦距离对绝对数值不敏感)。
-
相关阅读:
PyTorch中ReduceLROnPlateau的学习率调整优化器
常用类和内部类总结
uniapp实现微信小程序全局可分享功能
由 mysql 中的一次慢查询,来看 order by 的文件排序和索引排序
KR万能公式
KMP算法
前端文件上传的几种交互造轮子
macbook电脑删除app怎么才能彻底清理?
构建系列之前端脚手架vite
【Linux】测试ip:port端口是否连通即可达性测试
- 原文地址:https://blog.csdn.net/baidu_38262850/article/details/134333462

