-
NodeMCU ESP8266 中断介绍以及使用详解
前言
今天,我们将学习中断和定时器的相关概念,并且基于NodeMCU ESP8266 12E开发板搭建硬件电路,通过使用中断和定时器实现我们想要实现的功能。
中断介绍
中断在嵌入式开发中是很常见的功能,特别是在单片机的开发中。通常
GPIO引脚可以接收外部的信号,根据不同的信号类型,可以触发中断,进入中断服务函数。那什么是中断?整个流程又是怎么样的?下面做个形象的类比。
- 上学两年半的学生正在看书;(程序执行主任务,arduino中可以认为在执行
loop里的程序); - 电话忽然响起;(GPIO上有信号,触发了中断)
- 上学两年半的学习放下手里的书,跑去接电话;(响应中断,执行中断服务函数)
1 看书

2 电话响起
3 响应中断,去接电话
通过中断,我们不需要一直去检查当前的引脚状态,这种定时去检查引脚状态的机制一般叫做轮询;
相比较于中断,轮询的响应会慢很多,并且占用CPU资源;
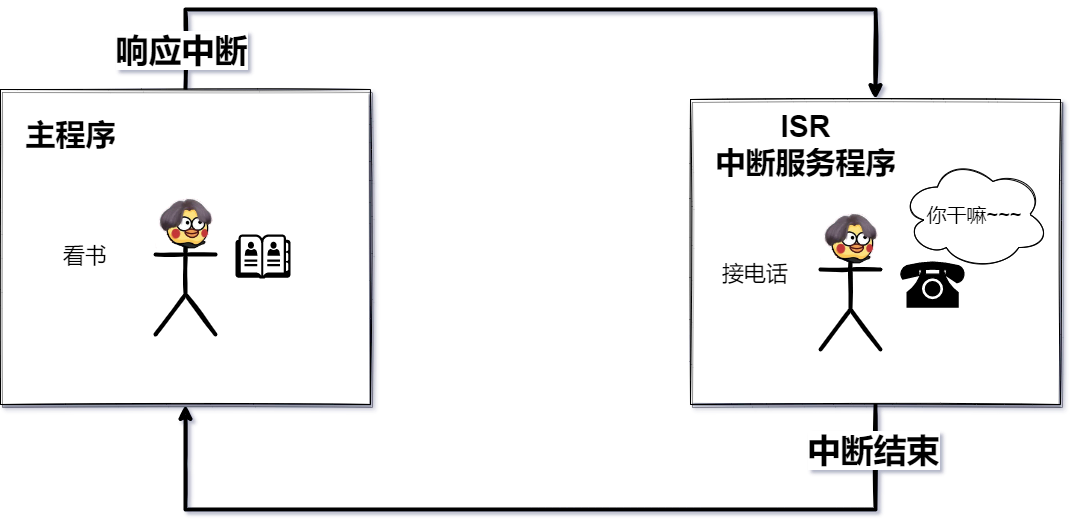
当检测到变化时,就会触发一个事件——调用一个函数。该函数称为中断服务程序(
ISR);当中断发生时,处理器停止主程序的执行以执行任务,然后回到主程序,如下图所示。
如何使用
AttachInterrupt() 函数
要在 Arduino IDE 中设置中断,我们可以使用
attachInterrupt()函数,接受以下参数作为参数:GPIO 中断引脚、要执行的函数的名称和模式:attachInterrupt(digitalPinToInterrupt(GPIO), ISR, mode);- 1
GPIO中断引脚
第一个参数是 GPIO 中断。你应该使用
digitalPinToInterrupt(GPIO)函数 将实际 GPIO 设置为中断引脚。例如,如果我们想使用 GPIO 14 作为中断,请使用:
digitalPinToInterrupt(14)- 1
ESP8266 支持除 GPIO16 之外的任何 GPIO 中断。
中断服务函数 ISR
该的第二个函数参数是
attachInterrupt()是每次触发中断时将调用的函数的名称——中断服务例程(ISR)。ISR 函数应该尽可能简单,以便处理器快速返回主程序的执行。
最好的方法是通过使用全局变量并在
loop()检查并清除该标志,然后执行代码。ISR 需要具备ICACHE_RAM_ATTR在函数定义之前运行 RAM 中的中断代码。
中断触发类型
第三个参数是模式,有 3 种不同的模式:
- CHANGE:每当引脚改变值时触发中断 - 例如从高到低或从低到高;
- FALLING:当引脚从高电平变为低电平时;
- RISING:当引脚从低电平变为高电平时触发。
对于我们的示例,将使用 RISING 模式,因为当 PIR 运动传感器检测到运动时,它所连接的 GPIO 从低电平变为高电平。
硬件电路
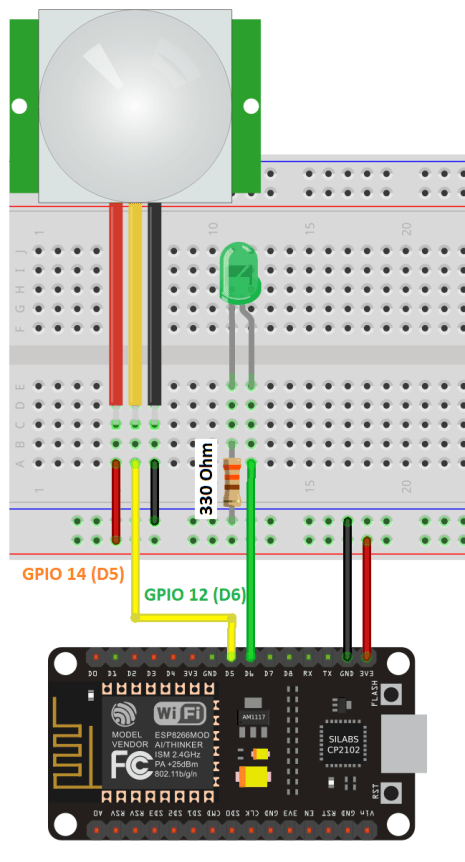
这里我们需要搭建一个硬件实验电路,将运动传感器和 LED集成到面包板上。
我们将 LED 连接到通用输入输出口12(D6)和 运动传感器数据引脚通用输入输出口14(D5)。
具体如下所示;
示例代码
按照原理图连接电路后,将提供的代码复制到 Arduino IDE。
您可以按原样上传代码,也可以修改检测到运动后 LED 点亮的秒数。只需更改
timeSeconds变量与我们想要的秒数。#define timeSeconds 10 // Set GPIOs for LED and PIR Motion Sensor const int led = 12; const int motionSensor = 14; // Timer: Auxiliary variables unsigned long now = millis(); unsigned long lastTrigger = 0; boolean startTimer = false; // Checks if motion was detected, sets LED HIGH and starts a timer ICACHE_RAM_ATTR void detectsMovement() { Serial.println("MOTION DETECTED!!!"); digitalWrite(led, HIGH); startTimer = true; lastTrigger = millis(); } void setup() { // Serial port for debugging purposes Serial.begin(115200); // PIR Motion Sensor mode INPUT_PULLUP pinMode(motionSensor, INPUT_PULLUP); // Set motionSensor pin as interrupt, assign interrupt function and set RISING mode attachInterrupt(digitalPinToInterrupt(motionSensor), detectsMovement, RISING); // Set LED to LOW pinMode(led, OUTPUT); digitalWrite(led, LOW); } void loop() { // Current time now = millis(); // Turn off the LED after the number of seconds defined in the timeSeconds variable if(startTimer && (now - lastTrigger > (timeSeconds*1000))) { Serial.println("Motion stopped..."); digitalWrite(led, LOW); startTimer = false; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
结论
本文简单介绍了
ESP8266的中断和相关概念,通过实现运动红外传感器的检测来实验中断的功能。 - 上学两年半的学生正在看书;(程序执行主任务,arduino中可以认为在执行
-
相关阅读:
微前端 - micro-app
【LeetCode】795.区间子数组个数
spark实验求TOP值
基于C#实现的小型动物识别推理系统
保研计网复习笔记:传输层
如何使用 Overleaf 编写 LaTeX 文档
SwissArmyTransformer瑞士军刀工具箱使用手册
Vue + Element-UI —— 项目实战(八)(完结)
在 Windows 操作系统中,可以通过命令行工具来杀死进程
pyG教程
- 原文地址:https://blog.csdn.net/u010632165/article/details/134315026
