-
【191】Java8在大比例尺小范围地图上,根据wgs84坐标系的经纬度计算两个点之间的方向和距离
场景
本文代码在大比例迟、小范围的地图上测试过。这些地图一般是县、区、镇、街道等范围的,其测试效果较好。由于地图范围较小,可以把经纬度近似看作直线。
问题分析
方向一共分东、南、西、北、东北、西北、西南、东南共八个方向。一周是 360 度,360 度除以 8 等于 45 度。以输入的第一个点为原点,绕此点一周,每个方向占45度。如果第二个点和第一个点的线段落在对应的角度范围内,就是对应的方向。
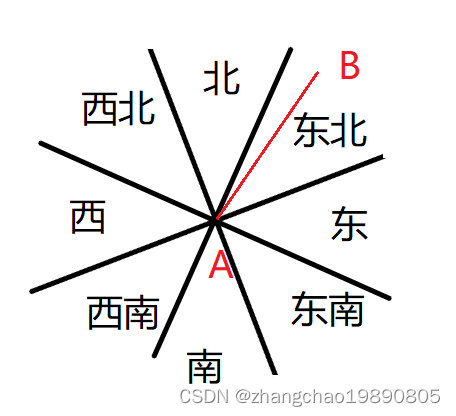
上图中表示了方向和角度的关系。第一个点是A,第二个点是B,如图所示,B在A的东北方向。
我以第一个点A为原点,点A所在的纬度线为x轴,点A所在的经度线为y轴,可以把地图划分成四个象限。在每个象限内,第二个点B和第一个点A之间的线段与y轴的角度决定了第二个点的方向。
请看下图例子:
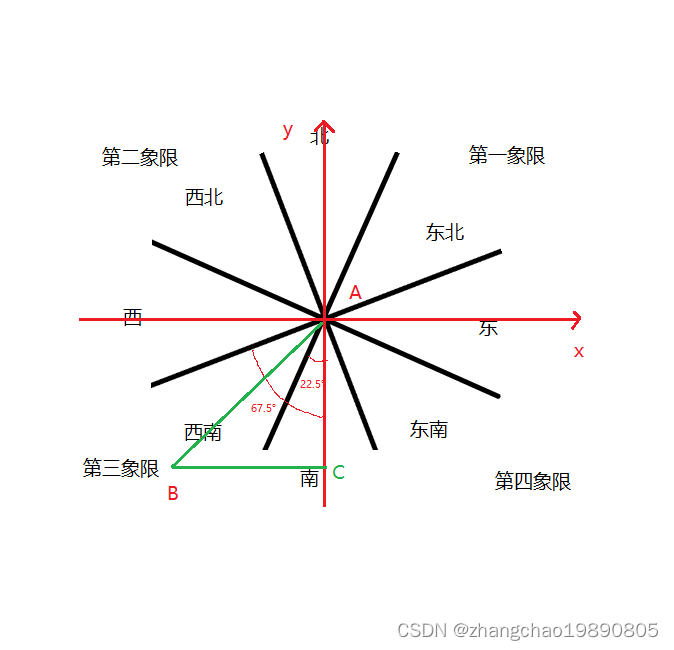
上图中以第三象限为例,标记出了对应的角度和方向的关系。
怎么求得角度的?
设第一个点是A,第二个点是B。以A为原点构建平面直角坐标系(如上图)。过B作一条与y轴垂直的直线,交点是C。显然ABC组成了一个直角三角形。利用经纬度可获取AB长度和AC长度,利用三角函数可计算角度。
代码实现
package zhangchao; public class GeoUtils { /** * 输入两个点的wgs84坐标系的经纬度,计算距离,单位是米。 * @param longitude1 第一个点的经度 * @param latitude1 第一个点的纬度 * @param longitude2 第二个点的经度 * @param latitude2 第二个点的纬度 * @return 两个点的距离,单位是米。 */ public static double calWgs84Distance(double longitude1, double latitude1, double longitude2, double latitude2) { double a = 6378137, b = 6356752.3142, f = 1 / 298.257223563; double L = Math.toRadians(longitude2 - longitude1); double U1 = Math.atan((1 - f) * Math.tan(Math.toRadians(latitude1))); double U2 = Math.atan((1 - f) * Math.tan(Math.toRadians(latitude2))); double sinU1 = Math.sin(U1), cosU1 = Math.cos(U1); double sinU2 = Math.sin(U2), cosU2 = Math.cos(U2); double lambda = L, lambdaP, iterLimit = 100; double cosSqAlpha; double sinSigma; double cos2SigmaM; double sigma; double sinLambda; double cosLambda; double cosSigma; do { sinLambda = Math.sin(lambda); cosLambda = Math.cos(lambda); sinSigma = Math.sqrt((cosU2 * sinLambda) * (cosU2 * sinLambda) + (cosU1 * sinU2 - sinU1 * cosU2 * cosLambda) * (cosU1 * sinU2 - sinU1 * cosU2 * cosLambda)); if(sinSigma == 0) return 0; cosSigma = sinU1 * sinU2 + cosU1 * cosU2 * cosLambda; sigma = Math.atan2(sinSigma, cosSigma); double sinAlpha = cosU1 * cosU2 * sinLambda / sinSigma; cosSqAlpha = 1 - sinAlpha * sinAlpha; cos2SigmaM = cosSigma - 2 * sinU1 * sinU2 / cosSqAlpha; // if(isNaN(cos2SigmaM)) // cos2SigmaM = 0; double C = f / 16 * cosSqAlpha * (4 + f * (4 - 3 * cosSqAlpha)); lambdaP = lambda; lambda = L + (1 - C) * f * sinAlpha * (sigma + C * sinSigma * (cos2SigmaM + C * cosSigma * (-1 + 2 * cos2SigmaM * cos2SigmaM))); } while (Math.abs(lambda-lambdaP) > (1e-12) && --iterLimit>0); if(iterLimit == 0) { return -1; } double uSq = cosSqAlpha * (a * a - b * b) / (b * b); double A = 1 + uSq / 16384 * (4096 + uSq * (-768 + uSq * (320 - 175 * uSq))); double B = uSq / 1024 * (256 + uSq * (-128 + uSq * (74 - 47 * uSq))); double deltaSigma = B * sinSigma * (cos2SigmaM + B / 4 * (cosSigma * (-1 + 2 * cos2SigmaM * cos2SigmaM) - B / 6 * cos2SigmaM * (-3 + 4 * sinSigma * sinSigma) * (-3 + 4 * cos2SigmaM * cos2SigmaM))); double s = b * A * (sigma - deltaSigma); double fwdAz = Math.atan2(cosU2 * sinLambda, cosU1 * sinU2 - sinU1 * cosU2 * cosLambda); double revAz = Math.atan2(cosU1 * sinLambda, -sinU1 * cosU2 + cosU1 * sinU2 * cosLambda); return s; } /** * 按照wgs84坐标系输入两个点的经纬度,计算第二个点在第一个点的什么方向。 * 方向用 东、南、西、北、东北、西北、西南、东南 * * @param longitude1 第一个点的经度 * @param latitude1 第一个点的纬度 * @param longitude2 第二个点的经度 * @param latitude2 第二个点的纬度 * @return 返回 东、南、西、北、东北、西北、西南、东南 */ public static String calNSEW(double longitude1, double latitude1, double longitude2, double latitude2) { if (longitude1 == longitude2 && latitude2 > latitude1) { return "北"; } if (longitude1 == longitude2 && latitude2 < latitude1) { return "南"; } if (latitude1 == latitude2 && longitude2 > longitude1) { return "东"; } if (latitude1 == latitude2 && longitude2 < longitude1) { return "西"; } // 计算两个点之间的距离 double dis12 = calWgs84Distance(longitude1, latitude1, longitude2, latitude2); // 以第一个点为原点,第一个点所在的纬度线为x轴,第一个点所在的经度线为y轴,可以把地图划分成四个象限。 // 第一象限 if (longitude2 > longitude1 && latitude2 > latitude1) { double longitude3 = longitude1; double latitude3 = latitude2; double dis13 = calWgs84Distance(longitude1, latitude1, longitude3, latitude3); double radians = Math.acos(dis13 / dis12); double angle =Math.toDegrees(radians); if (angle < 22.5) { return "北"; } else if (angle >= 22.5 && angle <= 67.5) { return "东北"; } else { return "东"; } } // 第二象限 if (longitude2 < longitude1 && latitude2 > latitude1) { double longitude3 = longitude1; double latitude3 = latitude2; double dis13 = calWgs84Distance(longitude1, latitude1, longitude3, latitude3); double radians = Math.acos(dis13 / dis12); double angle =Math.toDegrees(radians); if (angle < 22.5) { return "北"; } else if (angle >= 22.5 && angle <= 67.5) { return "西北"; } else { return "西"; } } // 第三象限 if (longitude2 < longitude1 && latitude2 < latitude1) { double longitude3 = longitude1; double latitude3 = latitude2; double dis13 = calWgs84Distance(longitude1, latitude1, longitude3, latitude3); double radians = Math.acos(dis13 / dis12); double angle =Math.toDegrees(radians); if (angle < 22.5) { return "南"; } else if (angle >= 22.5 && angle <= 67.5) { return "西南"; } else { return "西"; } } // 第四象限 if (longitude2 > longitude1 && latitude2 < latitude1) { double longitude3 = longitude1; double latitude3 = latitude2; double dis13 = calWgs84Distance(longitude1, latitude1, longitude3, latitude3); double radians = Math.acos(dis13 / dis12); double angle =Math.toDegrees(radians); if (angle < 22.5) { return "南"; } else if (angle >= 22.5 && angle <= 67.5) { return "东南"; } else { return "东"; } } return null; } public static void main(String[] args) { double lon1 = 120.084856; double lat1 = 35.891211; double lon2 = 120.444538; double lat2 = 36.390704; String nsew = calNSEW(lon1, lat1, lon2, lat2); double distance = calWgs84Distance(lon1, lat1, lon2, lat2); System.out.println(nsew); System.out.println(distance); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
-
相关阅读:
ggplot画热图 合并细胞组合细胞 单细胞基因整体表达量 合并多个细胞整体表达量条形热图 合并热图
W、X、Y
MySql5.1+版本主从同步配置(bin_log)模式
nodejs的koa传参校验的手搓
多路转接(使用epoll实现)
团建游戏---赢得用户
Android学习笔记 75. 单元测试
多线程进阶2 - 哈希表
Windows迁移文件的快速方法
Centos7配置国内yum源
- 原文地址:https://blog.csdn.net/zhangchao19890805/article/details/134324677
