-
STM32F103C8T6第三天:pwm、sg90、超声波、距离感应按键开盖震动开盖蜂鸣器
1. 定时器介绍1(317.21)
- 软件定时(之前的定时方法)(软件延时)
- 缺点:不精确、占用CPU资源
void Delay500ms() //@11.0592MHz { unsigned char i, j, k; _nop_(); i = 4; j = 129; k = 119; do { do { while (--k); } while (--j); } while (--i); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
定时器工作原理:
- 使用精准的时基,通过硬件的方式,实现定时功能。定时器核心就是计数器。

定时器分类:
- 基本定时器(TIM6 ~ TIM7)
- 通用定时器(TIM2 ~ TIM5)
- 高级定时器(TIM1 和 TIM8)

STM32F103C8T6定时器资源:

通用定时器介绍:
1) 16 位向上、向下、向上/向下自动装载计数器(TIMx_CNT)。 2) 16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535 之间的任意数值。 3)4 个独立通道(TIMx_CH1~4),这些通道可以用来作为: A.输入捕获 B.输出比较 C.PWM 生成(边缘或中间对齐模式) D.单脉冲模式输出 4)可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)的同步电路。 5)如下事件发生时产生中断/DMA: A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发) B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数) C.输入捕获 D.输出比较 E.支持针对定位的增量(正交)编码器和霍尔传感器电路 F.触发输入作为外部时钟或者按周期的- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
2. 定时器介绍1(318.22)
定时器计数模式:


定时器时钟源:

定时器溢出时间计算公式:(加一是因为计算机是从0开始计数的)

- 例如,要定时0.5s(2Hz),则:PSC=7199,ARR=4999,Tclk=72M(72000000Hz)
3. 使用定时器中断点亮LED灯(319.23)
- 需求:使用定时器中断方法,每500ms翻转一次LED1灯状态。
- RCC配置
- LED1灯配置
- 时钟数配置
- TIM2配置







- 工程配置
- 重写更新中断回调函数
- 代码(6.timer_test/MDK-ARM)
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {//重写更新中断回调函数 if(htim->Instance == TIM2) HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);//每过500ms翻转led1的状态 }- 1
- 2
- 3
- 4
- 5
- 启动定时器
- 在main.c中,在定时器初始化命令之后加入以下代码:
HAL_TIM_Base_Start_IT(&htim2);
4. PWM概述(320.24)
STM32F103C8T6 PWM 资源:
- 高级定时器(TIM1):7路
- 通用定时器(TIM2~TIM4):各4路


PWM 输出模式:
- PWM 模式1:在向上计数时,一旦 CNT < CCRx 时输出为有效电平,否则为无效电平; 在向下计数时,一旦 CNT > CCRx 时输出为无效电平,否则为有效电平。
- PWM 模式2:在向上计数时,一旦 CNT < CCRx 时输出为无效电平,否则为有效电平; 在向下计数时,一旦 CNT > CCRx 时输出为有效电平,否则为无效电平。

PWM 周期与频率:
PWM 占空比:
- 由 TIMx_CCRx 寄存器决定。
5. PWM实现呼吸灯效果(321.25)
- 需求:使用PWM点亮LED1实现呼吸灯效果。
LED灯为什么可以越来越亮,越来越暗?
- 这是由不同的占空比决定的。
如何计算周期/频率?
- 假如频率为 2kHz(0.0005s=0.5ms) ,则:PSC=71,ARR=499,Tclk=72000000
LED1连接到哪个定时器的哪一路?
- 学会看产品手册:

开始实战!
- 设置时钟



- 设置定时器
- 把极性设置为 Low,因为 LED 灯是低电平亮

- 配置工程


- 业务代码
- 代码(7.pwm_test/MDK-ARM)
//main函数 // 定义变量 uint16_t pwmVal=0; //调整PWM占空比 uint8_t dir=1; //设置改变方向。1:占空比越来越大;0:占空比越来越小 HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_TIM4_Init(); // 使能 Timer4 第3通道 PWM 输出 HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开pwm // while循环实现呼吸灯效果 while (1) { HAL_Delay(1);//如果没有 可能会不亮 if (dir) pwmVal++;//1:越来越亮 else pwmVal--;//0:越来越暗 //pwmVal 达到 PWM 周期时,就会反向改变方向 if(pwmVal >= htim4.Init.Period)//越来越亮到顶端后 dir = 0;//变为越来越暗 else if (pwmVal <= 0)//越来越暗到底端后 dir = 1;//变为越来越亮 //修改比较值(CCRx)即修改占空比 __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
6. 感应开关盖垃圾桶项目概述(322.26)
项目需求
- 检测靠近时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
- 发生震动时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
- 按下按键时,垃圾桶自动开盖并伴随滴一声,2 秒后关盖
项目框图
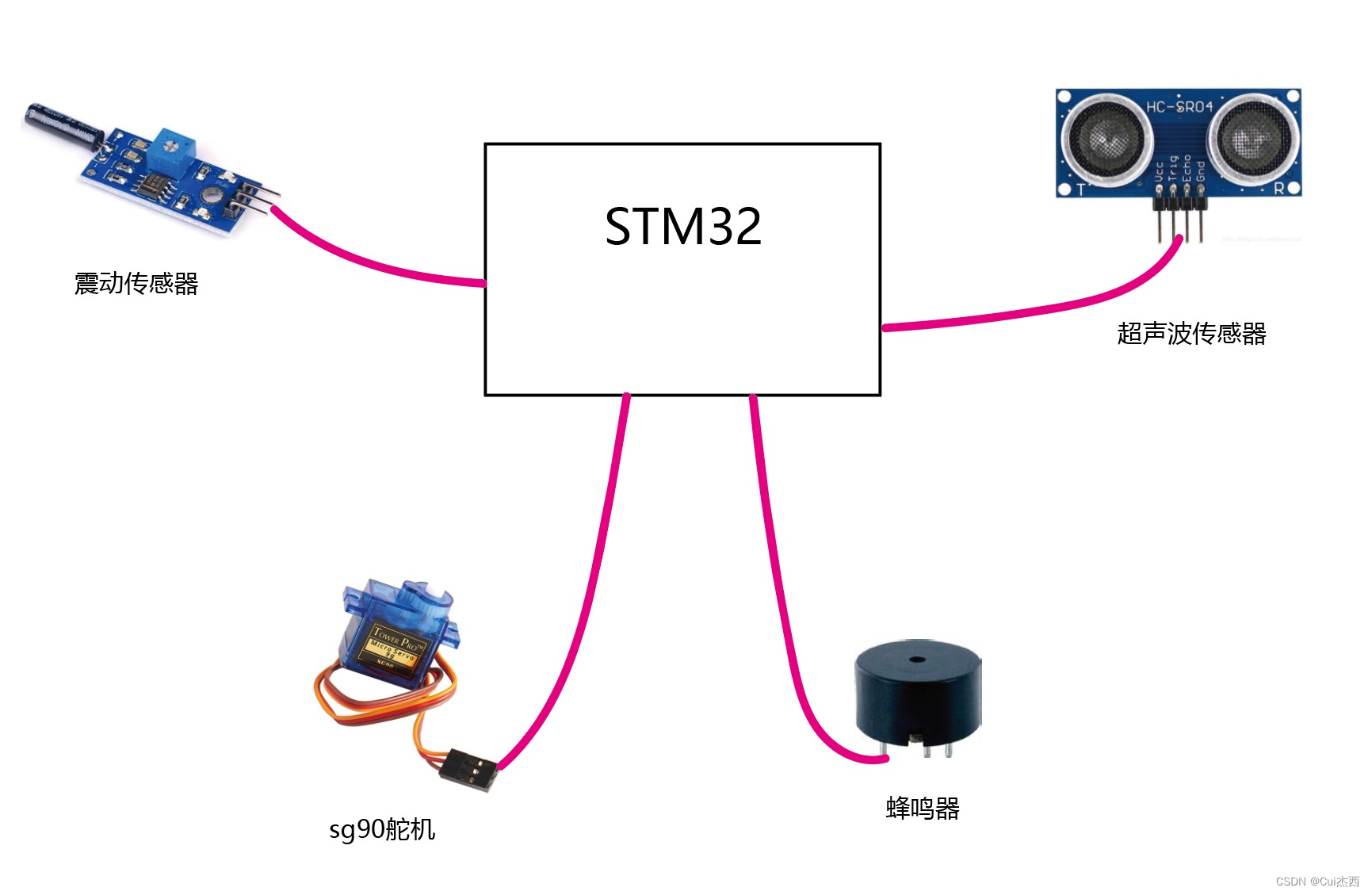
硬件清单
- SG90舵机,超声波模块,震动传感器,蜂鸣器
7. sg90舵机概述(324.28)
sg90舵机介绍

- PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右。
确定周期/频率
- 如果周期为20ms,则 PSC=7199,ARR=199
角度控制
- 0.5ms-------------0度;2.5% 对应函数中 CCRx 为 5
- 1.0ms------------45度;5.0% 对应函数中 CCRx 为 10
- 1.5ms------------90度;7.5% 对应函数中 CCRx 为 15
- 2.0ms-----------135度;10.0% 对应函数中 CCRx 为 20
- 2.5ms-----------180度;12.5% 对应函数中 CCRx 为 25

8. sg90舵机编程实战(323.27)
- 需求: 每隔1s,转动一个角度:0度 --> 45度 --> 90度 --> 135度 --> 180度 --> 0度
- 接线:

- STM32CubeMx工程配置




- 代码(8.sg90_test/MDK-ARM)
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);//打开Time4 第3通道的 PWM while (1) { HAL_Delay(1000); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 10); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 15); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 25); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
9. 超声波传感器介绍及实战(325.29)
超声波传感器介绍

-
怎么让它发送波
- Trig ,给Trig端口至少10us的高电平
-
怎么知道它开始发送了
- Echo信号,由低电平跳转到高电平,表示开始发送波
-
怎么知道接收了返回波
- Echo,由高电平跳转回低电平,表示波回来了
-
怎么算时间
Echo引脚维持高电平的时间!- 波发出去的那一刻,开始启动定时器;
- 波返回来的拿一刻,开始停止定时器;
计算出中间经过多少时间。
-
怎么算距离
- 距离 = 速度 (340m/s)* 时间/2

- 距离 = 速度 (340m/s)* 时间/2
编程实战
- 需求: 使用超声波测距,当手离传感器距离小于5cm时,LED1点亮,否则保持不亮状态。
- 接线:
- Trig — PB6
- Echo — PB7
- LED1 — PB8

- 定时器配置:
- 使用 TIM2 ,只用作计数功能,不用作定时。
- 将 PSC 配置为 71,则计数 1 次代表 1us 。







- 编写微秒级函数:
//使用TIM2来做us级延时函数 void TIM2_Delay_us(uint16_t n_us) { /* 使能定时器2计数 */ __HAL_TIM_ENABLE(&htim2); __HAL_TIM_SetCounter(&htim2, 0); while(__HAL_TIM_GetCounter(&htim2) < (1 * n_us)); /* 关闭定时器2计数 */ __HAL_TIM_DISABLE(&htim2); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10

- 主函数:
//1. Trig ,给Trig端口至少10us的高电平 //2. echo由低电平跳转到高电平,表示开始发送波 //波发出去的那一下,开始启动定时器 //3. 由高电平跳转回低电平,表示波回来了 //波回来的那一下,我们开始停止定时器 //4. 计算出中间经过多少时间 //5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us) //每500毫秒测试一次距离- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 代码(9.sr_04_test/MDK-ARM)
int main() { int cnt = 0; float distance = 0; HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_TIM2_Init(); while (1) { //1. Trig ,给Trig端口至少10us的高电平 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);//拉高 TIM2_Delay_us(20); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//拉低 //2. echo由低电平跳转到高电平,表示开始发送波 //波发出去的那一下,开始启动定时器 while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_RESET); HAL_TIM_Base_Start(&htim2);//启动定时器 __HAL_TIM_SetCounter(&htim2,0);//从0开始计数 //3. 由高电平跳转回低电平,表示波回来了 //波回来的那一下,我们开始停止定时器 while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_SET); HAL_TIM_Base_Stop(&htim2); //4. 计算出中间经过多少时间 cnt = __HAL_TIM_GetCounter(&htim2); //5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us) distance = 340*100*0.000001*cnt/2; //单位:cm if(distance < 5) HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET); else HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET); //每500毫秒测试一次距离 HAL_Delay(500); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
10. 封装超声波测距代码(326.30)
- 工程配置







- 代码(10.rubbish_test/MDK-ARM)
//使用TIM2来做us级延时函数 void TIM2_Delay_us(uint16_t n_us) { /* 使能定时器2计数 */ __HAL_TIM_ENABLE(&htim2); __HAL_TIM_SetCounter(&htim2, 0); while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) ); /* 关闭定时器2计数 */ __HAL_TIM_DISABLE(&htim2); } double get_distance() { int cnt = 0; //1. Trig ,给Trig端口至少10us的高电平 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);//拉高 TIM2_Delay_us(20); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//拉低 //2. echo由低电平跳转到高电平,表示开始发送波 //波发出去的那一下,开始启动定时器 while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_RESET); HAL_TIM_Base_Start(&htim2);//启动定时器 __HAL_TIM_SetCounter(&htim2,0);//从0开始计数 //3. 由高电平跳转回低电平,表示波回来了 //波回来的那一下,我们开始停止定时器 while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)==GPIO_PIN_SET); HAL_TIM_Base_Stop(&htim2); //4. 计算出中间经过多少时间 cnt = __HAL_TIM_GetCounter(&htim2); //5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us) return (340*100*0.000001*cnt/2); //单位:cm } int main(void) { float distance = 0; HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_TIM2_Init(); while (1) { distance = get_distance(); if(distance < 5) HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET); else HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET); //每500毫秒测试一次距离 HAL_Delay(500); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
11. 实现距离感应开关盖(327.31)


- 代码(10.rubbish_test/MDK-ARM)
void openStatusLight() { //点亮LED1 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET); } void closeStatusLight() { //熄灭LED1 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET); HAL_Delay(150);每150毫秒测试一次距离 } void initSG90_0() { HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4); //启动定时器4 __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度 } void openDusbin() { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度 HAL_Delay(100); } void closeDusbin() { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度 HAL_Delay(150);//每150毫秒测一次距离 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
12. 添加按键开盖功能(328.32)
- STM32CubeMx工程配置

- 代码(10.rubbish_test/MDK-ARM)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if(GPIO_Pin == GPIO_PIN_0) { openDusbin(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
13. 添加震动开盖功能(329.33)
- STM32CubeMx工程配置


- 代码(10.rubbish_test/MDK-ARM)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if(GPIO_Pin == GPIO_PIN_0 || GPIO_Pin == GPIO_PIN_5) { if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET || //按键 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET) // 震动传感器 { openStatusLight();//开灯 openDusbin();//开盖 } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
14. 添加蜂鸣器(330.34)
- STM32CubeMx工程配置

- 代码(10.rubbish_test/MDK-ARM)
void openDusbin() { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET); HAL_Delay(100);//蜂鸣器响100ms HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET); HAL_Delay(2000);//开盖两秒 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
15. 解决垃圾筒抽抽Bug(331.35)
- 代码(10.rubbish_test/MDK-ARM)
void openDusbin() { if(flag == CLOSE) { flag = OPEN; __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15); //将舵机置为90度 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET); HAL_Delay(100);//蜂鸣器响100ms HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET); } HAL_Delay(2000);//开盖两秒 } void closeDusbin() { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度 flag = CLOSE; HAL_Delay(150);//每150毫秒测一次距离 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
-
相关阅读:
【Django | 开发】面试招聘信息网站(美化admin站点&添加查看简历详情链接)
Leecode56:合并区间(贪心算法)
我狂揽16个offer:面试常问的这些问题你准备了吗?
AP9196 DC-DC升降 升降压 6A 恒流DEMO原理图
ESP32 之 ESP-IDF 教学(十七)——组件依赖
计算机网络网络层数据链路层协议详解
学习笔记--强化学习(1)
Elasticsearch:使用向量搜索来搜索图片及文字
【无标题】
Node基础概念,先了解一下
- 原文地址:https://blog.csdn.net/Jaci133/article/details/134230507
