-
串口中断(9)即时解析用户自定义通讯协议--接收数据固定情况
本文为博主 日月同辉,与我共生,csdn原创首发。希望看完后能对你有所帮助,不足之处请指正!一起交流学习,共同进步!
> 发布人:@日月同辉,与我共生_单片机-CSDN博客
> 欢迎你为独创博主日月同辉,与我共生点赞❤❤❤+关注👍+收藏🌹+评论☺。
系列专栏: CSDN-单片机串口通信学习系列🎁
> 我的格言是:“尽最大努力,做最好的自己!💪
要转载,请提前告知!!!
版权声明:本文为CSDN博主「日月同辉,与我共生」的原创文章,CSDN独一份。

目录
一、系统设计要求
虚拟终端com1发数据给单片机com1,接收后将数据重新发给com3。
com3发送到数据:帧头(1、2帧)+数据类型(3帧)+数据块(4、5帧)+效验位(6、7帧)
帧头:共2帧,55 AA
数据类型:共1帧,01时控制LED灯,02时控制蜂鸣器
数据块:共2帧,第一帧为高8位,第二帧为低8位,两帧合并为16位2进制,用于控制LED亮/蜂鸣器发声时间。
效验位:共2帧,第一帧为和效验,第二帧为异或效验。
com1将数据重新的数据:发送到数据不是将接收到的数据全部发送给com3,而是第3-5帧数据发送给com3。
二、系统设计原理
本次实验采取"边接收边处理式"的思路。
由于串口通信是一帧一帧接收的,所以我们可以每接收一帧就判断帧头数据的正确性。
至于com1要重新发送的数据,可以定义一个数组recv_buf用于存储com1要发送的数据。
使用switch-case语句,分支0、1,分别判断帧头数据55和AA后,进入下一个分支。
分支2接收类型+代码快(共3帧),并将3帧存储到数组recv_buf,同时定义两个专门计算效验值的变量(和效验变量sum_check和异或效验变量xor_check),在分支2中计算出第3-5帧的和效验值、异或效验值。
然后进入分支3、4,用于判断计算出的和效验、异或效验值是否与接收到效验帧数据相同。如果和效验和异或效验位正确,则接收完成标志位recv_flag置1,代表接收数据完成且正确 。
主程序中,在recv_flag==1的基础上进行,根据类型数据帧,采用switch-case语句分别处理LED/蜂鸣器。
持续时间:高8位左移8位+低8位
LED发亮持续时间:led_data=recv_buf[1]<<8+recv_buf[2];
蜂鸣器发声时间:beep_data=recv_buf[1]<<8+recv_buf[2];
注:recv_buf[0]是数据类型,recv_buf[1]是高8位,recv_buf[2]是低8位。
三、硬件设计
3.1串口设计
com1发送端TXD接com2发送端TXD,com1接收端RXD接com2接收端RXD。
虚拟终端RXD接TXD(因为单片机发送数据给com3,而虚拟终端可以理解为虚拟串口com3)。

3.2LED电路设计
LED灯采用共阳极接法,左端接电源(高电平1),右端通过电阻接P1^0,P1^0低电平时,LED导通,发亮;P1^0高电平时,LED不导通,不亮(熄灭)。

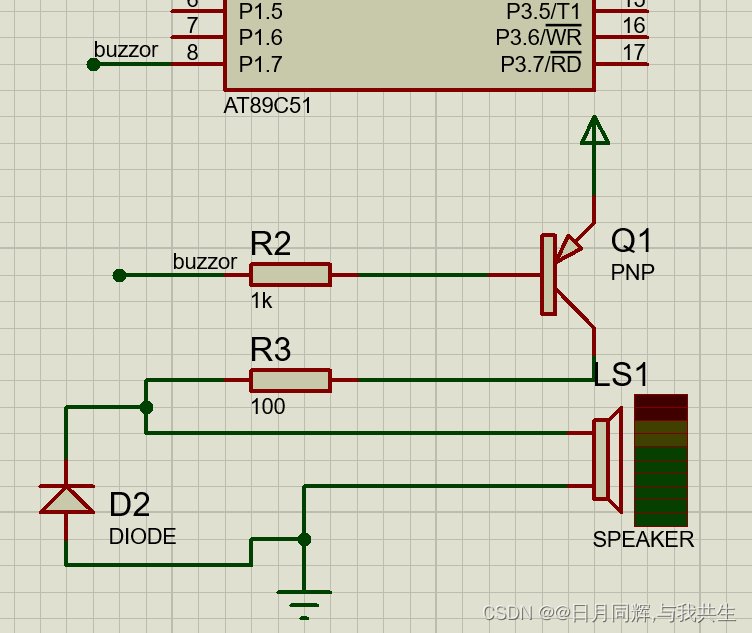
3.3蜂鸣器设计
R2右端接到P1^7,P1^7为低电平时,三极管导通,+5V电源(提供电压电流的作用)与蜂鸣器连接,蜂鸣器正极为高电平;P1^7为高电平,三极管不导通,蜂鸣器正极为低电平。
四、软件设计
4.1串口初始化
波特率9600b/s,晶振频率为11.0592Mhz,串口工作方式1(8位异步通信,波特率可变),定时器T1的工作方式2(8位自动重载)。
- void UartInit(void) //9600bps@11.0592MHz
- {
- PCON &= 0x7F; //波特率不倍速
- SCON = 0x50; //8位数据,可变波特率
- TMOD &= 0x0F; //设置定时器模式
- TMOD |= 0x20; //设置定时器模式
- TL1 = 0xFD; //设置定时初始值
- TH1 = 0xFD; //设置定时重载值
- ET1 = 0; //禁止定时器中断
- ES=1; //串口中断打开
- TR1 = 1; //定时器1开始计时
- }
4.2接收中断
帧头判断55 AA==>将3帧(1帧类型+2帧数据块),计算和效验值、异或效验值==>判断和效验、异或效验是否正确==>正确则接收完成标志位recv_flag置1。
不直接用数组recv_buf来存储接收数据,因为recv_buf存储的数据用于发送给com3,而单片机只将一部分数据发送给com3,不能将接收到的数据全存储到recv_buf。需要定义recv_data(中间值),用于接收com3发来的数据。
- void ES_timers() interrupt 4 //接收中断
- {
- static unsigned char machine_step=0;//分支变量
- static unsigned char sum_check;//和效验
- static unsigned char xor_check;//异或效验
- if(RI)
- {
- RI=0; //RI清0
- recv_data=SBUF;//接收数据
- switch(machine_step)
- {
- case 0:
- if(recv_data==0x55)//帧头:55
- {
- machine_step=1;
- }
- else
- {
- machine_step=0;
- }
- break;
- case 1:
- if(recv_data==0xAA)//帧头:AA
- {
- machine_step=2;
- recv_cnt=0;
- }
- else
- {
- machine_step=0;
- }
- break;
- case 2:
- recv_buf[recv_cnt]=recv_data;//将单片机com1要发送到数据存储到数组recv_buf
- recv_cnt++;
- sum_check+=recv_data; //计算和效验
- xor_check^=recv_data; //计算异或效验
- if(recv_cnt>2) //存储完3个数据(类型01/02+代码快)后进入下一分支
- {
- machine_step=3;
- }
- else
- {
- machine_step=2;
- }
- break;
- case 3:
- if(sum_check==recv_data) //和效验正确
- {
- machine_step=4;
- }
- else
- {
- machine_step=0;
- }
- break;
- case 4:
- if(xor_check==recv_data) //异或效验正确
- {
- recv_flag=1;//接收正确
- }
- machine_step=0;
- sum_check=0;//和效验变量清0
- xor_check=0;//异或效验变量清0
- recv_cnt=0;
- break;
- default:break;
- }
- }
- }
4.3定时器T0初始化
- void Timer0_Init(void) //1毫秒@11.0592MHz
- {
- TMOD &= 0xF0; //设置定时器模式
- TMOD |= 0x01; //设置定时器模式
- TL0 = 0x66; //设置定时初始值
- TH0 = 0xFC; //设置定时初始值
- TF0 = 0; //清除TF0标志
- ET0=1; //定时器0中断打开
- TR0 = 1; //定时器0开始计时
- }
4.4定时器中断
- void T0_timer() interrupt 1 //利用1ms计数,判断是否接收完成
- {
- TR0=0;
- if(led_cnt
- {
- LED=0;
- led_cnt++;
- }
- else //LED灯灭
- {
- LED=1;
- }
- if(beep_cnt!=0) //蜂鸣器发声
- {
- Beep=~Beep;
- beep_cnt--;
- }
- TL0 = 0x66; //设置定时初始值
- TH0 = 0xFC; //设置定时初始值
- TR0=1;
- }
4.5发送数据函数
- void sendByte(unsigned char dat) //发送一帧数据功能函数
- {
- SBUF=dat;
- while(!TI);
- TI=0;
- }
- void sendString(unsigned char *dat)//发送字符串函数
- {
- while(*dat != '\0')
- {
- sendByte(*dat++);
- }
- }
4.6主程序
- #include
- #include "uart.h"
- void Timer0_Init(); //定时器0函数声明
- sbit LED=P1^0;//位定义
- sbit Beep=P1^7;
- void main()
- {
- UartInit(); //调用串口初始化函数
- Timer0_Init();
- EA=1; //总中断允许
- while(1)
- {
- if(recv_flag==1)//接收完成
- {
- recv_flag=0;
- sendString(recv_buf);//发送缓冲区数据
- switch(recv_buf[0])//根据类型判断对LED处理还是蜂鸣器处理
- {
- case 0x01:
- led_data=recv_buf[1]<<8;//高8位recv_buf[1]左移8位
- led_data=led_data+recv_buf[2];//计算LED控制时间
- led_cnt=0;
- break;
- case 0x02:
- beep_data=recv_buf[1]<<8;//高8位recv_buf[1]左移8位
- beep_data=beep_data+recv_buf[2];//计算蜂鸣器控制时间
- beep_cnt=beep_data;
- break;
- default:clr_recvbuffer(recv_buf);//清除缓存
- break;
- }
- }
- }
- }
4.7uart.h
- #ifndef __UART_H__
- #define __UART_H__
- #include
- #include
- #define MAX_REX_NUM 20
- #define MAX_timer_cnt 5
- extern unsigned char recv_buf[MAX_REX_NUM];
- extern unsigned char recv_cnt;
- extern unsigned char start_timer;
- extern unsigned char recv_timer_cnt;
- extern unsigned char recv_flag;
- extern unsigned int led_data;
- extern unsigned int beep_data;
- extern unsigned int led_cnt;
- extern unsigned int beep_cnt;
- void UartInit(void);
- void sendByte(unsigned char dat);
- void sendString(unsigned char *dat);
- char putchar(char c);
- void clr_recvbuffer(unsigned char *buf);
- #endif
五、结果展示
5.1控制LED
com3发送给com1的数据:55 AA 01 20 20 41 01
com1重新发回给com3的数据:01 20 20
结果:LED亮2020ms,2020ms后灭。

5.2控制蜂鸣器
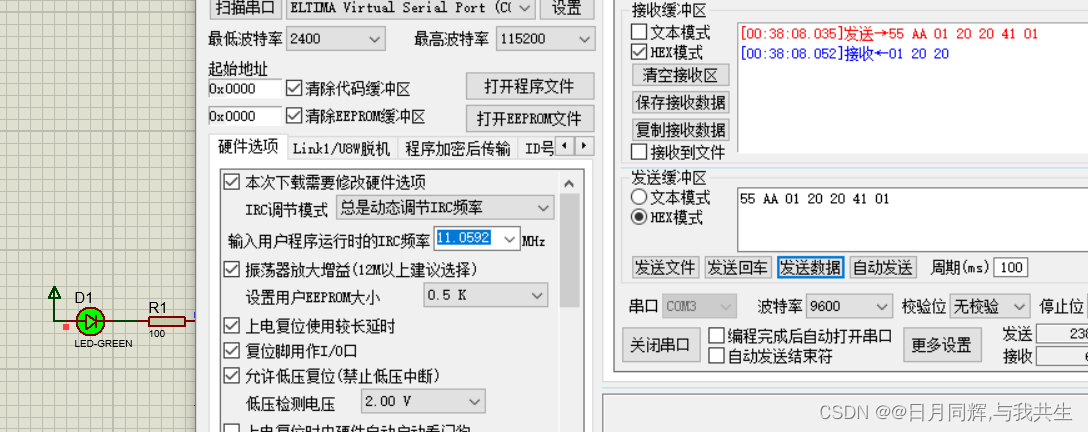
com3发送给com1的数据:55 AA 02 20 20 42 02
com1重新发回给com3的数据:02 20 20
结果:蜂鸣器发声2020ms,2020ms后停止发声。


六、效验软件推荐
为方便读者们学习串口通信,为大家推荐效验计算工具。
链接:
异或校验/BCC校验计算-ME2在线工具 (metools.info)


亲爱的读者敬请期待,下一文更精彩!!!
一日不读书,胸臆无佳想。我叫不白吃,喜欢我的,可以支持我,博主名叫@日月同辉,与我共生
-
相关阅读:
文章资源下载小程序的基础配置(以Serverless WordPress为后端)
字符串的基本运用
银行数仓项目实战(一)--什么是数据仓库
spring容器ioc和di
HarmonyOS实战经验合集之ArkUI(二)
linux修改rocketmq的日志文件位置
(c/c++)——智能指针
C++学习笔记——链表基础算法
发布的webservice缺少< wsdl:types/ >,< wsdl:message/ >标签
LaTex模板免费下载网站
- 原文地址:https://blog.csdn.net/LIN___IT/article/details/134256765