-
自学SLAM(5)《第三讲:李群和李代数》作业
前言

小编研究生的研究方向是视觉SLAM,目前在自学,本篇文章为初学高翔老师课的第三次作业。
1.群的性质
课上我们讲解了什么是群。请根据群定义,求解以下问题:
- {Z, +} 是否为群?若是,验证其满⾜群定义;若不是,说明理由。
- {N, +} 是否为群?若是,验证其满⾜群定义;若不是,说明理由。
其中 Z 为整数集, N 为⾃然数集。
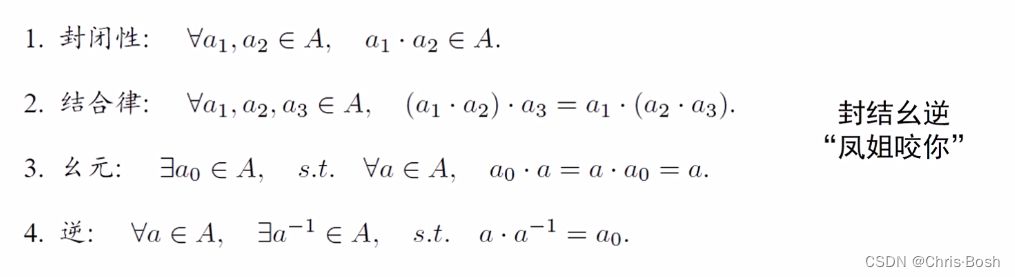
在这里我再写一下群的定义,满足“凤姐咬你”的就是群,也就是四个性质,如图:
注意:
Ⅰ 图中吧集合记作A,运算记作·(·不代表乘法),群可以记作G=(A,·)
Ⅱ 对于整数的逆,进行的是乘法,它的逆就是它的倒数 进行的是加法,它的逆就是它的相反数
对于 {Z, +} ,设a1∈Z,a2∈Z,a3∈Z
①封闭性:对于任意的a1∈Z,a2∈Z都有a1+a2∈Z,满足封闭性。
②结合性:对于任意的a1∈Z,a2∈Z,a3∈Z,都有(a1+a2)+a3=a1+(a2+a3),满足结合性。
③幺元:Z中存在0∈Z,对于任意的a∈Z,有a+0=a+0=a,因此满足幺元。
④逆:对于任意的a∈Z,有-a∈Z,a+(-a)=0,任何整数加上它的相反数等于幺元0,所以逆元素是其相反数,因此满足逆。对于 {N, +}
①封闭性:两个自然数相加依然是自然数,封闭性成立。
②结合性:两个自然数相加可以互换位置,结合性成立。
③幺元:任何自然数与0相加仍然是自然数本身,幺元成立。
④逆: 自然数都是非负数(加法中,自然数的逆已经不属于自然数了),所以两个大于等于0的数相加不可能为0,逆不成立。2.验证向量叉乘的李代数性质
我们说向量和叉乘运算构成了李代数,现在请你验证它。书中对李代数的定义为:李代数由⼀个集合V,⼀个数域 F 和⼀个⼆元运算 [,]组成。如果它们满⾜以下⼏条性质,称 (V, F, [, ]) 为⼀个李代数,记作g。
注意:自反性是指自己与自己的运算为零。
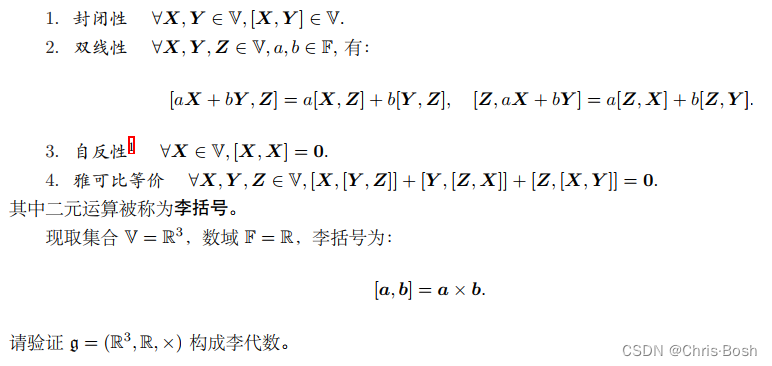
解题过程如下:

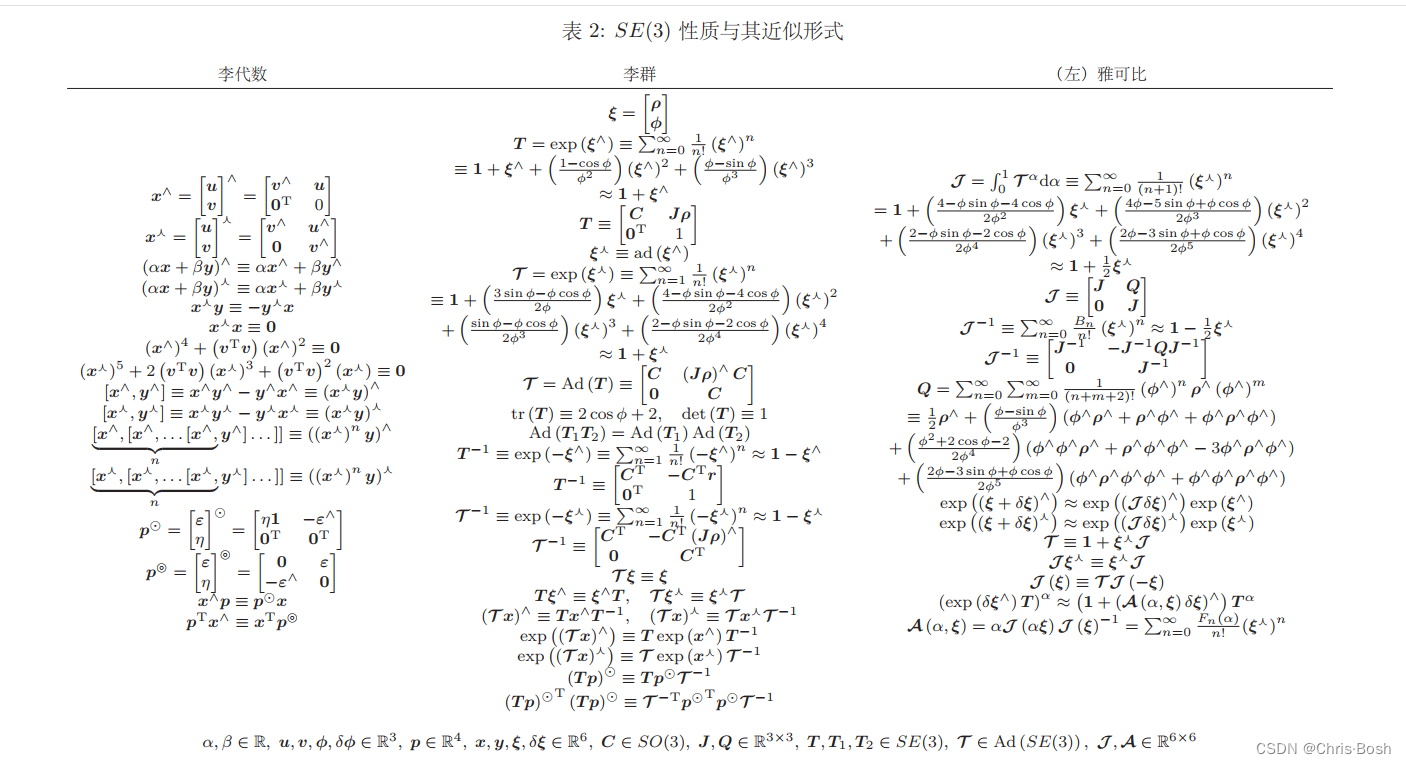
3.推导 SE(3) 的指数映射
课上给出了 SO(3) 的指数映射推导,但对于 SE(3),仅介绍了结论,没有给出详细推导。请你完成 SE(3)指数映射部分,有关左雅可⽐的详细推导。
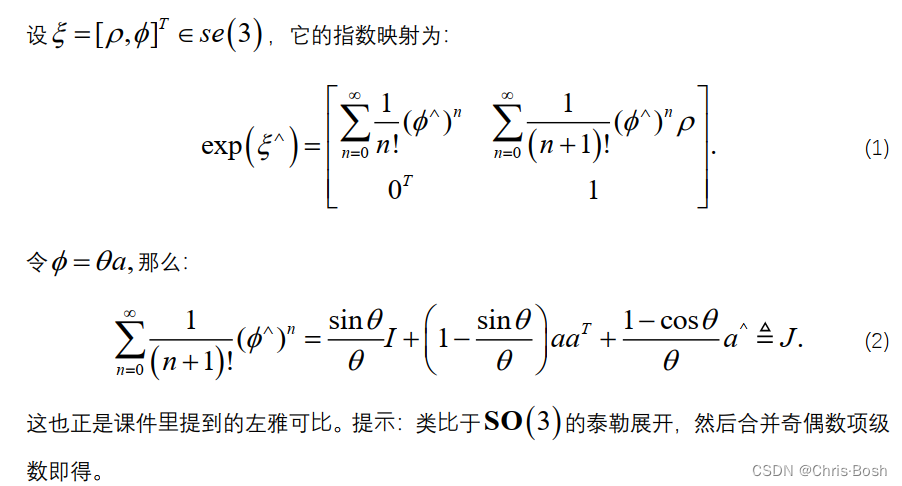
解题过程如下:


4.伴随
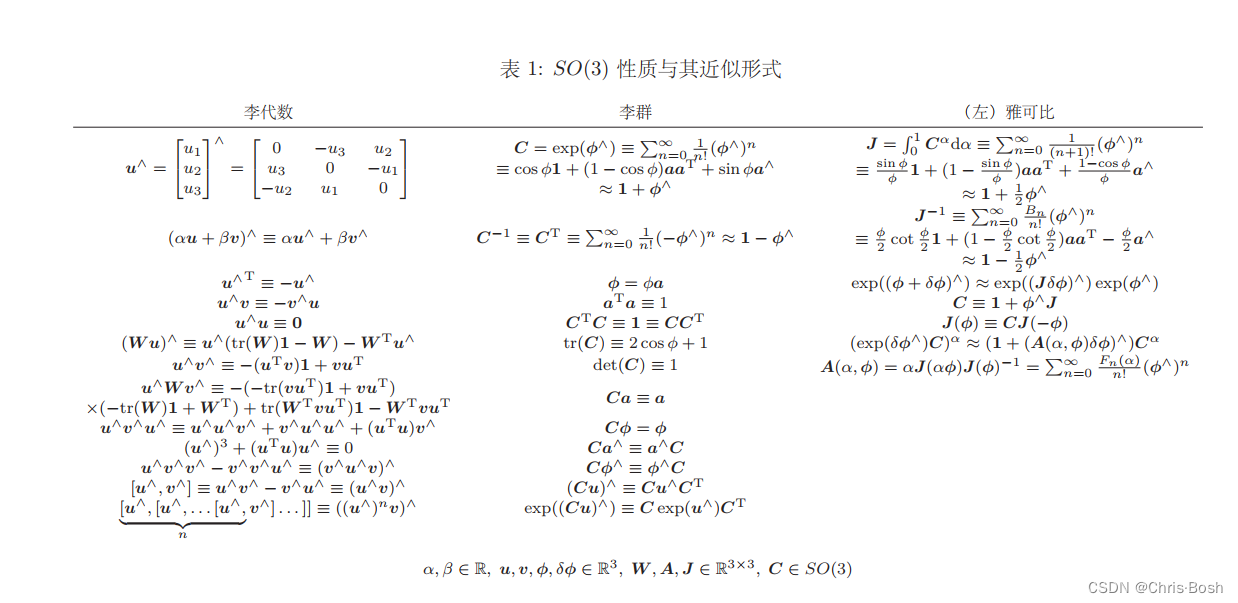
在 SO(3) 和 SE(3) 上,有⼀个东西称为伴随(Adjoint)。下⾯请你证明 SO(3)伴随的性质。

解题过程如下:

完整的 SO(3) 和 SE(3) 性质见下图
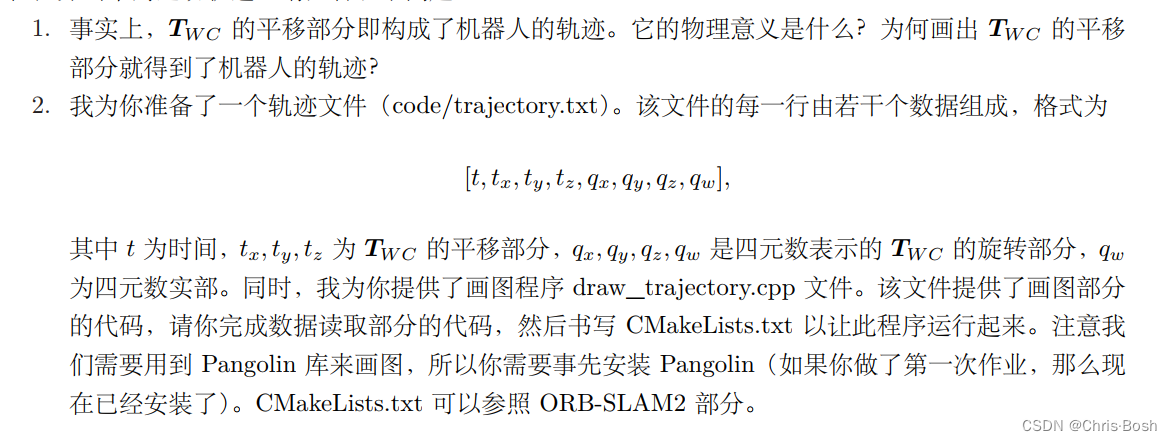
5.轨迹的描绘
我们通常会记录机器⼈的运动轨迹,来观察它的运动是否符合预期。⼤部分数据集都会提供标准轨迹以供参考,如 kitti、 TUM-RGBD 等。这些⽂件会有各⾃的格式,但⾸先你要理解它的内容。记世界坐标系为 W,机器⼈坐标系为 C,那么机器⼈的运动可以⽤ TWC 或TCW来描述。现在,我们希望画出机器⼈在世界当中的运动轨迹,请回答以下问题:
解题过程如下:
世界坐标系W(world),机器人坐标系也就是相机坐标系C(camera)①Twc指的是从世界坐标系原点到相机中心的平移向量,(机器人(相机)坐标系的原点在世界坐标系中的坐标)
世界坐标系是不随相机运动变化的,因此可以认为Twc是机器人相对于原点坐标在移动, 移动可视化在观察者眼中就是机器人的运动轨迹。如果我们假设机器人坐标系的原点为Oc,此时的Ow就是这个原点在世界坐标系下的坐标:
Ow=TwcOc=twc
这正是Twc的平移部分。因此,可以从Twc中直接看到相机在何处,这也就是我们所说的Twc更为直观。因此在可视化程序里,轨迹文件储存的是Twc而不是Tcw。我想这也是第一问问我们Twc而不是问·Tcw的原因。
②
首先我们需要安装Sophusgit clone https://github.com/strasdat/Sophus.git cd Sophus git checkout a621ff mkdir build cd build cmake .. make sudo make install- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
但是我们会编译失败,按照如下操作修改后,重新编译即可。
解决方法:打开 Sophus/sophus/so2.cpp文件修改报错内容//将 SO2::SO2() { unit_complex_.real() = 1.; unit_complex_.imag() = 0.; } //改为 SO2::SO2() { unit_complex_.real(1.); unit_complex_.imag(0.); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
这时候我们就可以安装成功Sophus了
draw_trajectory.cpp对应代码如下:
#include "sophus/so3.h" #include "sophus/se3.h" #include#include #include #include #include // need pangolin for plotting trajectory #include using namespace std; // path to trajectory file string trajectory_file = "/home/zhe/1/lianxi/3/plotTrajectory/trajectory.txt"; class SE3d; void DrawTrajectory(vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>>); int main(int argc, char **argv) { vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> poses; //文件读取器 ifstream fin(trajectory_file); if (!fin) { cerr << "trajectory " << trajectory_file << " not found." << endl; } //如果eof()返回0,就没读完 while (!fin.eof()) { //按照时间 平移 四元素的顺序定义并读取 double time, tx, ty, tz, qx, qy, qz, qw; fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw; Sophus::SE3 p1(Eigen::Quaterniond(qw, qx, qy, qz), Eigen::Vector3d(tx, ty, tz)); poses.push_back(p1); } fin.close(); // end your code here // draw trajectory in pangolin DrawTrajectory(poses); return 0; } /************************************************************************/ void DrawTrajectory(vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> poses) { if (poses.empty()) { cerr << "Trajectory is empty!" << endl; return; } // create pangolin window and plot the trajectory pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768); glEnable(GL_DEPTH_TEST); glEnable(GL_BLEND); glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); pangolin::OpenGlRenderState s_cam( pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) ); pangolin::View &d_cam = pangolin::CreateDisplay() .SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f) .SetHandler(new pangolin::Handler3D(s_cam)); while (pangolin::ShouldQuit() == false) { glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); d_cam.Activate(s_cam); glClearColor(1.0f, 1.0f, 1.0f, 1.0f); glLineWidth(2); for (size_t i = 0; i < poses.size() - 1; i++) { glColor3f(1 - (float) i / poses.size(), 0.0f, (float) i / poses.size()); glBegin(GL_LINES); auto p1 = poses[i], p2 = poses[i + 1]; glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]); glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]); glEnd(); } pangolin::FinishFrame(); usleep(5000); // sleep 5 ms } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
CmakeLists.txt对应代码如下:
cmake_minimum_required(VERSION 2.8) project(draw_trajectory) set( CMAKE_BUILD_TYPE "Release" ) set( CMAKE_CXX_FLAGS "-std=c++11 -O3" ) set( CMAKE_BUILD_TYPE "Debug" ) find_package(Pangolin REQUIRED) find_package(Sophus REQUIRED) include_directories("/usr/include/eigen3") include_directories( ${Pangolin_INCLUDE_DIRS} ${Sophus_INCLUDE_DIR} ) add_executable(trajectory draw_trajectory.cpp) target_link_libraries(trajectory ${Pangolin_LIBRARIES} ${Sophus_LIBRARIES} )- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
然后
cd SLAM4track//自己建的文件夹 cat CMakeLists.txt cd build cmake .. make ./trajectory- 1
- 2
- 3
- 4
- 5
- 6
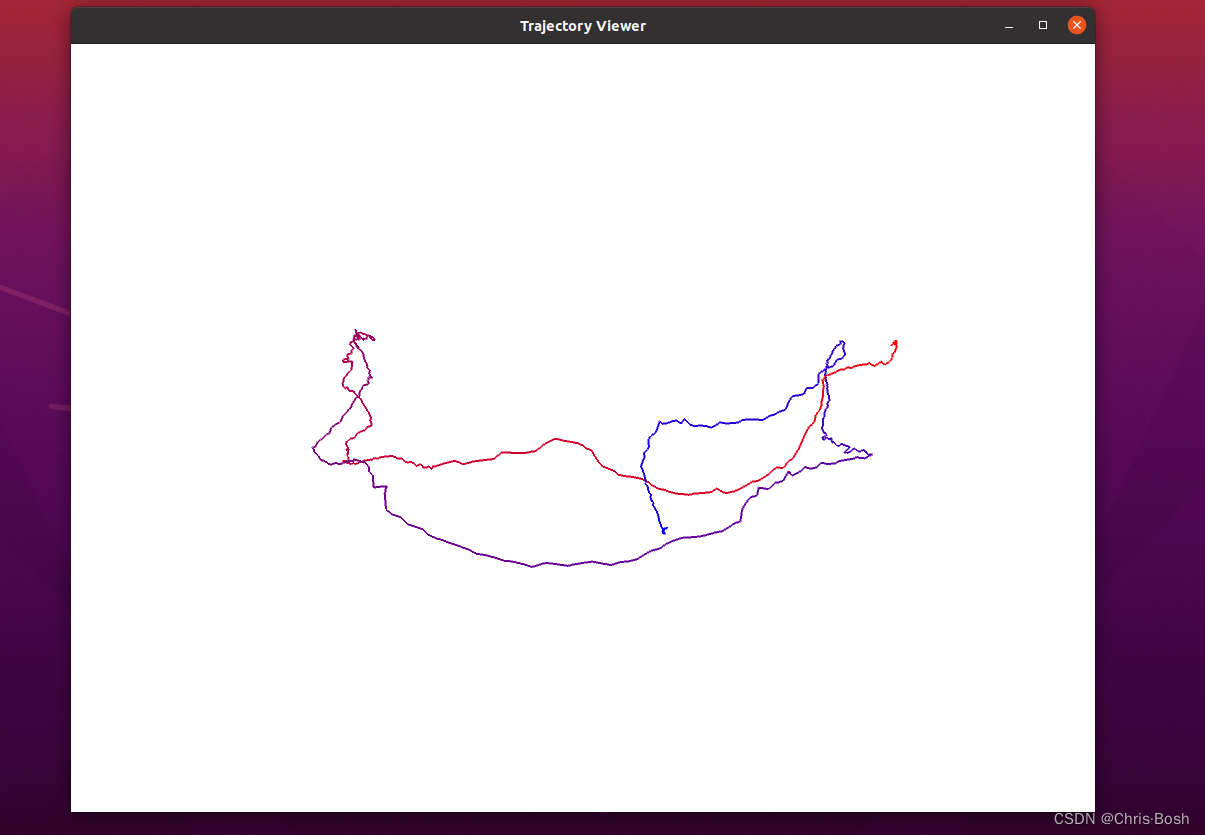
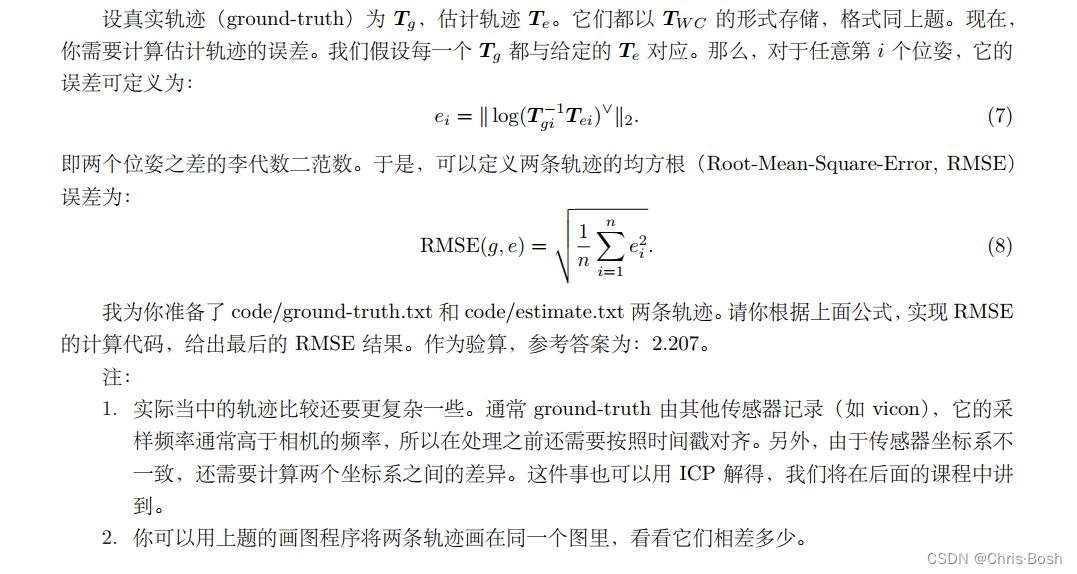
该图中:轨迹首尾颜色不一样,通过观察,发现是着色函数设置的颜色随位置变化.6.* 轨迹的误差(附加题)
本题为附加题。 除了画出真实轨迹以外,我们经常需要把 SLAM 估计的轨迹与真实轨迹相⽐较。下⾯说明⽐较的原理,请你完成⽐较部分的代码实现。
CMakeLists.txt对应代码
cmake_minimum_required(VERSION 2.8) project(wucha) set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") #set(CMAKE_CXX_STANDARD 11) #set(CMAKE_BUILD_TYPE "Release") #set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/bin) #set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib) #添加库 #sophus # 为使用 sophus,需要使用find_package命令找到它并赋给Sophus_INCLUDE_DIRS find_package(Sophus REQUIRED) include_directories(${Sophus_INCLUDE_DIRS}) #Pangolin生成一个libPangolin动态链接库 find_package(Pangolin REQUIRED) include_directories(${Pangolin_INCLUDE_DIRS}) include_directories("/usr/include/eigen3") #编译 add_executable(plotError compare_tra.cpp) #链接 #target_link_libraries(plotError Sophus::Sophus) target_link_libraries(plotError ${Sophus_LIBRARIES} ) target_link_libraries(plotError ${Pangolin_LIBRARIES})- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
compare_tra.cpp对应代码:
#include "sophus/so3.h" #include "sophus/se3.h" #include#include #include #include #include #include // need pangolin for plotting trajectory #include using namespace std; // path to trajectory file string gt_file = "../groundtruth.txt"; string est_file = "../estimated.txt"; vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> gt_poses,est_poses; // function for plotting trajectory, don't edit this code // start point is red and end point is blue void DrawTrajectory(vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> gt_poses, vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> est_poses); void readData(string filepath); void ErrorTrajectory(); int main(int argc, char **argv) { readData(gt_file); readData(est_file); ErrorTrajectory(); // draw trajectory in pangolin DrawTrajectory(gt_poses,est_poses);//打印两条轨迹 return 0; /// implement pose reading code // start your code here (5~10 lines) } /*******************************************************************************************/ void readData(string filepath){ vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> poses; ifstream infile(filepath); double t1,tx,ty,tz,qx,qy,qz,qw; string line; if(infile) { while(getline(infile,line)) { stringstream record(line); //从string读取数据 record>>t1>>tx>>ty>>tz>>qx>>qy>>qz>>qw; Eigen::Vector3d t(tx,ty,tz); Eigen::Quaterniond q = Eigen::Quaterniond(qw,qx,qy,qz).normalized(); //四元数的顺序要注意 Sophus::SE3 SE3_qt(q,t); poses.push_back(SE3_qt); } } else { cout<<"没找到这个文件"<<endl; } if(filepath==gt_file){ gt_poses = poses; }else if( filepath==est_file ){ est_poses = poses; }else{ cout<<"读文件出错"<<endl;} infile.close(); } /*******************************************************************************************/ void ErrorTrajectory() { double RMSE = 0; Eigen::Matrix<double ,6,1> se3; vector<double> error; for(int i=0;i<gt_poses.size();i++){ se3=(gt_poses[i].inverse()*est_poses[i]).log(); //这里的se3为向量形式,求log之后是向量形式 //cout< - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
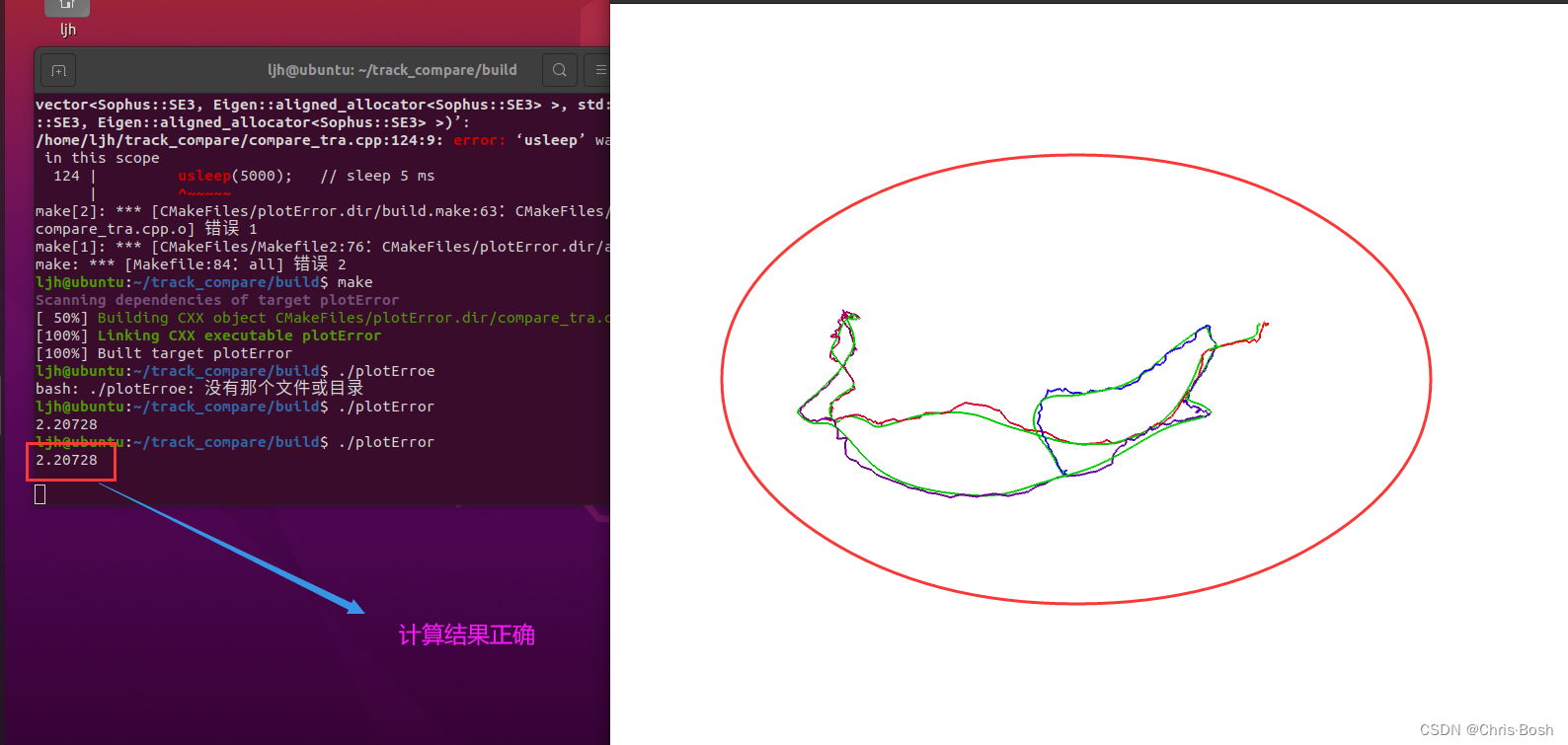
然后运行,运行命令如下:
cd track_compare cd build cmake .. make ./plotError- 1
- 2
- 3
- 4
- 5
本人自学SLAM,如果错误,还请见谅留言提醒
希望的我的博客对你有帮助!
-
相关阅读:
Flink--4、DateStream API(执行环境、源算子、基本转换算子)
es6两个数组取交集、并集、差集、补集
【剑指Offer】3.数组中重复的数字
DSPE-PEG-Hydrazide,DSPE-PEG-HZ,磷脂-聚乙二醇-酰肼可增强稳定性
通用后台管理系统前端界面Ⅷ——公用组件之面包屑
RDMA技术原理和三种实现方式
一分钟看懂TCP粘包拆包
凭什么软件测试入门就有一万+工资,为什么?我不相信。
【AICFD案例操作】潜艇阻力AI预测分析
7、架构-架构的安全性
- 原文地址:https://blog.csdn.net/qq_57425280/article/details/134055069
