-
APC学习记录
APC概念
APC全称叫做异步过程调用,英文名是
Asynchronous Procedure Call,在进行系统调用、线程切换、中断、异常时会进行触发执行的一段代码,其中主要分为内核APC与用户APC,故名思意内核APC在执行时APC的代码在内核,用户APC在执行时代码在用户层。APC是依赖于线程的,所以在线程的KTHREAD中可以找到关于APC的所有相关信息
APC插入、执行过程逆向分析
插入过程
因为APC的插入会调用KeInsertQueueApc,我们逆向分析这个函数即可

 插入过程很简单,KeInsertQueueApc其实是在判断APC队列是否禁用或APC是否插入,对应的WRK代码如下
插入过程很简单,KeInsertQueueApc其实是在判断APC队列是否禁用或APC是否插入,对应的WRK代码如下
 继续跟入KiInsertQueueApc,其中也是根据各种APC模式来进行插入位置的选择
继续跟入KiInsertQueueApc,其中也是根据各种APC模式来进行插入位置的选择
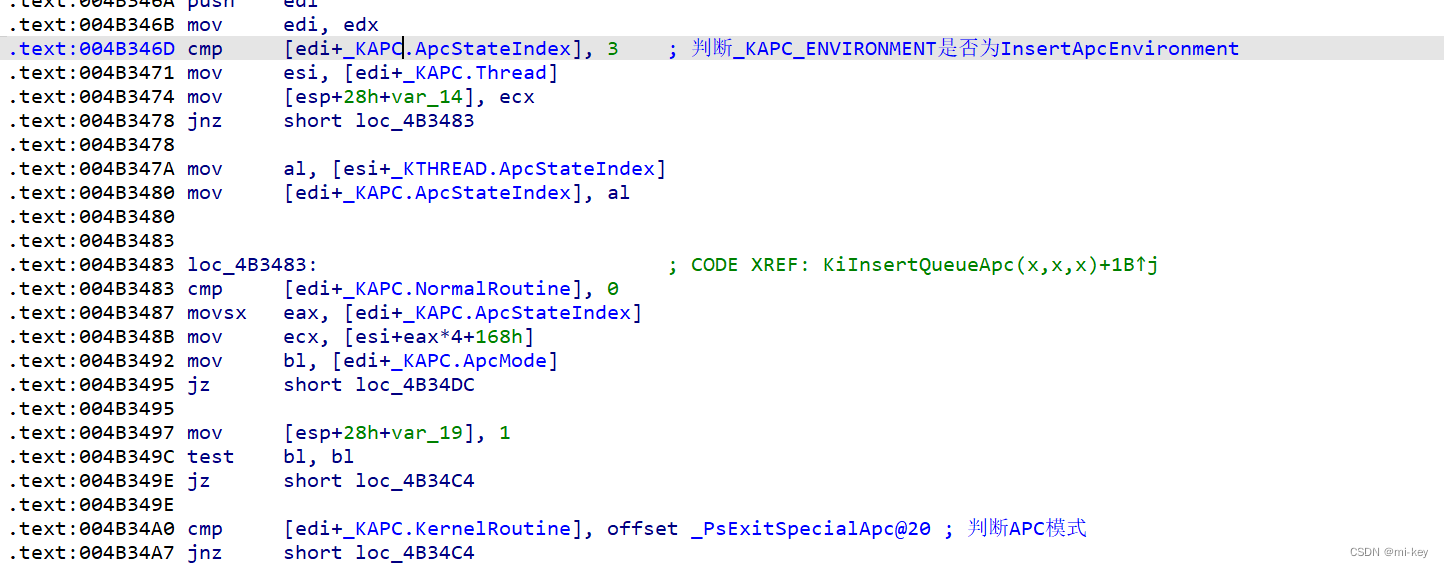
对应的WRK代码如下

这里就不继续往下面跟了,感兴趣可以仔细阅读WRK的代码和注释执行过程
APC执行调用的是KiDeliverApc函数,其中会先执行KernelRoutine中的代码,如果NormalRoutine不为空,则调用KiInitializeUserApc对用户APC进行初始化操作
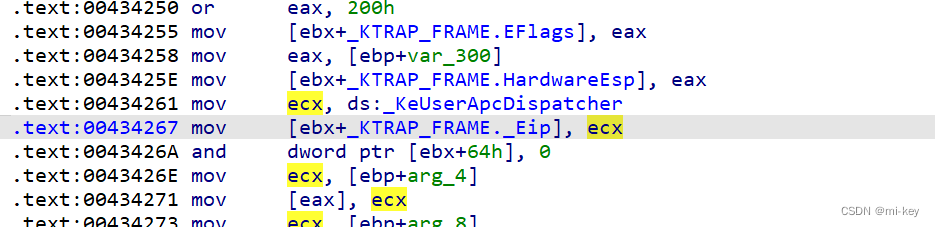
 KiInitializeUserApc通过KeContextFromKframes将KTRAP_FRAME保存一份,以便后续返回使用
KiInitializeUserApc通过KeContextFromKframes将KTRAP_FRAME保存一份,以便后续返回使用
 修改EIP,使其跳转到三环的KeUserApcDispatcher,执行用户的APC代码
修改EIP,使其跳转到三环的KeUserApcDispatcher,执行用户的APC代码
以上分析对应的WRK代码如下,也可以看出先执行KernelRoutine,后执行NormalRoutine

总结
插入过程主要是根据参数决定APC插入链表的位置
执行过程主要是先执行参数的KernelRoutine的代码,如果有NormalRoutine则跳到三环去遍历执行再回到内核,以此往复将链表中的所有APC执行完毕代码演示
用户层被插入代码
#include#include void haha() { printf("APC被执行了!\n"); } int main() { printf("pid:%d 函数地址:%x \n", GetCurrentThreadId(), haha); while (1) { SleepEx(30000,FALSE); printf("qqqqqqqqqqqq\n"); } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
驱动头文件“test.h”
#pragma once #includetypedef VOID (*PKNORMAL_ROUTINE) ( IN PVOID NormalContext, IN PVOID SystemArgument1, IN PVOID SystemArgument2 ); typedef VOID (*PKRUNDOWN_ROUTINE) ( IN struct _KAPC* Apc ); typedef VOID (*PKKERNEL_ROUTINE) ( IN struct _KAPC* Apc, IN OUT PKNORMAL_ROUTINE* NormalRoutine, IN OUT PVOID* NormalContext, IN OUT PVOID* SystemArgument1, IN OUT PVOID* SystemArgument2 ); typedef enum _KAPC_ENVIRONMENT { OriginalApcEnvironment, AttachedApcEnvironment, CurrentApcEnvironment, InsertApcEnvironment } KAPC_ENVIRONMENT; VOID KeInitializeApc( __out PRKAPC Apc, __in PRKTHREAD Thread, __in KAPC_ENVIRONMENT Environment, __in PKKERNEL_ROUTINE KernelRoutine, __in_opt PKRUNDOWN_ROUTINE RundownRoutine, __in_opt PKNORMAL_ROUTINE NormalRoutine, __in_opt KPROCESSOR_MODE ApcMode, __in_opt PVOID NormalContext ); BOOLEAN KeInsertQueueApc( __inout PRKAPC Apc, __in_opt PVOID SystemArgument1, __in_opt PVOID SystemArgument2, __in KPRIORITY Increment ); BOOLEAN KeAlertThread( __inout PKTHREAD Thread, __in KPROCESSOR_MODE AlertMode ); - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
驱动代码
#include#include"test.h" VOID DriverUnload(_In_ struct _DRIVER_OBJECT* DriverObject) { DbgPrint("--------------DRIVER_UNLOAD-----------------"); } VOID kernelRoutineFunc( IN struct _KAPC* Apc, IN OUT PKNORMAL_ROUTINE* NormalRoutine, IN OUT PVOID* NormalContext, IN OUT PVOID* SystemArgument1, IN OUT PVOID* SystemArgument2 ) { DbgPrintEx(77, 0, "[db]:---------kernelRoutineFunc pid = %d--------------\r\n", PsGetCurrentProcessId()); DbgPrintEx(77, 0, "[db]:kernelRoutineFunc\r\n"); ULONG64 addr = 0x401000; PsWrapApcWow64Thread(NULL, &addr); *NormalRoutine = addr; ExFreePool(Apc); } NTSTATUS DriverEntry(IN PDRIVER_OBJECT pDriverObject, IN PUNICODE_STRING pRegistryPath) { PKAPC pApc = ExAllocatePool(NonPagedPool, sizeof(KAPC)); memset(pApc, 0, sizeof(KAPC)); PETHREAD eThread = NULL; PsLookupThreadByThreadId(2632, &eThread); KeInitializeApc(pApc, eThread, OriginalApcEnvironment, kernelRoutineFunc, NULL, 0x401000, UserMode, (PVOID)1); DbgBreakPoint(); *(PCHAR)((PCHAR)eThread + 0x4c) |= 0x20; BOOLEAN is = KeInsertQueueApc(pApc, eThread, NULL, 0); if (!is) { ExFreePool(pApc); } KeAlertThread(eThread, UserMode); pDriverObject->DriverUnload = DriverUnload; return STATUS_SUCCESS; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
驱动代码中主要有两个新鲜的函数
PsWrapApcWow64Thread与KeAlertThreadPsWrapApcWow64Thread:为了将32位的地址进行转换到64位进行使用,这样驱动就可以直接在64位下进行插入,如果读者想修改成32位可以把这个函数删除并将eThread + 0x4c改为eThread + 0x3cKeAlertThread:可以立即执行我们插入的APC函数参考资料
https://www.cnblogs.com/sanyimitian/p/14219541.html
https://blog.csdn.net/hongduilanjun/article/details/126850904
火哥视频 -
相关阅读:
Python之“诗词大会”游戏
使用canvas实现时间轴上滑块的各种常用操作(仅供参考)
【HarmonyOS应用开发】三方库(二十)
iOS系统暗黑模式
AT89S51编辑和烧录软件过程
基于Javaee的影视创作论坛的设计与实现(源码开放)
MATLAB程序设计与应用 3.2 矩阵变换
kafka安装流程
大端模式与小端模式
【加载数据--自定义自己的Dataset类】
- 原文地址:https://blog.csdn.net/qq_45844442/article/details/134089592
