-
重复控制器的性能优化
前言
重复控制器在控制系统中是比较优秀的控制器,在整流逆变等周期性输入信号时,会有很好的跟随行,通常可以单独使用,也可以与其他补偿器串联并联使用。
这里我来分析一下重复控制器的重复控制器的应用工况以及其的优缺点。分析1
如下给出了一个重复控制器的内膜结构。50hz的输入信号,采样频率为10K
采样次数N = 10000/50 =200
常熟滤波器取:Q(z)=0.95
重复控制器的内膜传递函数为

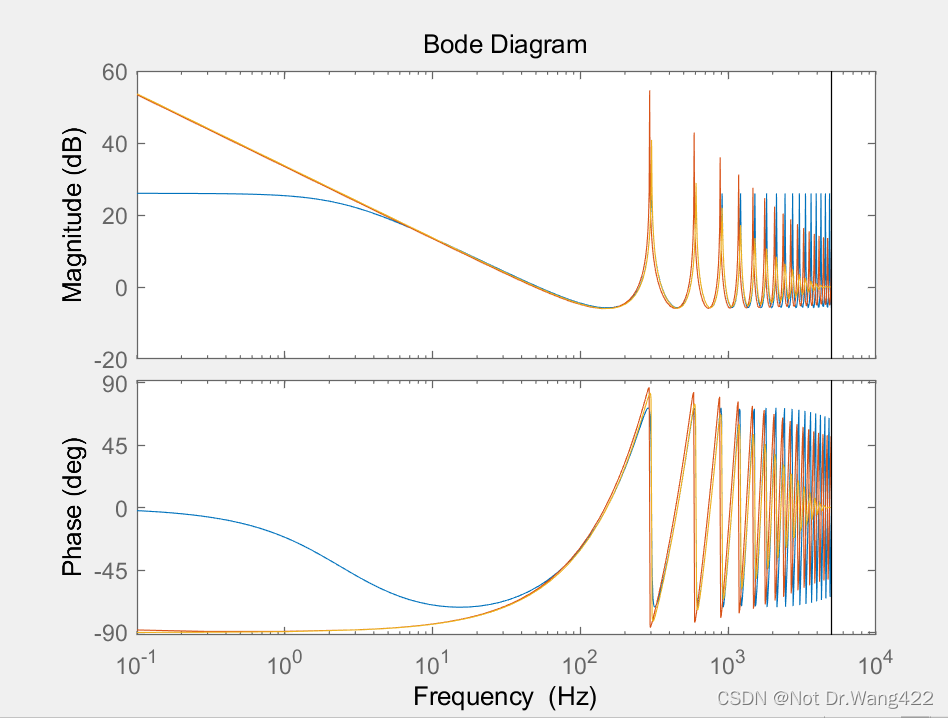
伯德图:

分析有:
优点:
1.此控制器对于基波频率的整数倍50*k(K=1,2…)都具有很好的跟随性
2.此控制器对于高次谐波也具有很好的抑制性(高次参考给定0),具有QPR控制器的特性。
3.相对与pid控制器运算资源更小。缺点:
1.响应慢,如果只想抑制(6n±1)次谐波,
2.低频增益不够,
3.如果不对高次谐波进行抑制补偿,需要高次增益低,此不能满足。
4.有类似pid的积分饱和现象。
下面只针对1、2缺点进行改进优化。优化改进
1.采样次数优化,当然如果是自适应频率的情况下,采样次数做相应优化,这里只提供加快重复控制器对(6n±1)次谐波的响应
2.内膜系数的优化,采用低通滤波器或者是零相位滤波器。优化1
传递函数如图所示:
伯德图如图所示:

由上图分析可以知道,此时只在6N处的增益比较高,能够抑制(6n±1)的谐波,也能够补偿此处的谐波。
此优化可加快重复控制器的响应速度。优化2
内膜系数的优化
常数内膜系数取:Q1= 0.95
相移内膜系数 :

零相位内膜系数:

分别对这些内膜系数的重复控制其进行仿真分析:
这里分析常数内膜系数和相位内膜系数:

相位内膜系数提供了高增益,但是发生了明显的相位移动。这里分析常数内膜系数和零相位内膜系数:

放大分析

由图可知,在基波频率处,零相移提供了高增益,且没有相位移动

由图可知,在高频处,零相移提供了增益衰减,能够提供一定的高频滤波特性。
但是也有一些问题,也就是此时失去了一定的谐波抑制能力,如果再增加谐波补偿环节可能需要耗费cpu的更多运算资源,所以需要根据性能需求指标,以及硬件的采样滤波系数选取重复控制其的内膜增益系数。 -
相关阅读:
基于bert训练自己的分词系统
linux-快捷执行历史命令
Win11开始菜单右键空白?Win11开始菜单右键没反应解决方法
【前端版】分布式医疗云平台【登陆页面修改、页面 title 修改、登陆接口准备说明、把前端和后端统一使用 git 管理、启动前端 VUE 项目、用户登陆】(十七)
HCIP第十八天笔记
什么是Jmeter ?Jmeter使用的原理步骤是什么?
Java项目:ssm毕业论文管理系统
串口转RS485:自动收发串口转RS485设计注意事项
基于SSM的疫情期间高校师生外出请假管理系统设计与实现
C#应用的欢迎界面窗体方案 - 开源研究系列文章
- 原文地址:https://blog.csdn.net/weixin_41270987/article/details/134072269