-
倍福控制Beckhoff_AX5000 控制第三方电机
1. 把第三方电机的.XML 文件,拷贝到 C:\TwinCAT\Io\TcDriveManager\MotorPool 目录下,并重新启动 TwinCAT。
2. 打开新的 System Manager 文件,完成 Choose Target 之后,把 TwinCAT System Manager 置为 Config mode。
3. 右击 I/O‐Configuration 中 I/O Devices,Scan Devices,如图 1 所示

4. 会跳出对话框,如图 2 所示

5. 点击“是(Y)”,因为接了伺服驱动器,跳出下面的对话框,
 6、点击“是(Y)”,出现下面的界面。扫描到伺服之后,(1)TSM 文件自动添加 了 NC‐Configuration 项,如图中小标题 1 所示。(2)添加了伺服驱动器:Driver 1(AX5203‐0000‐0010)。图中对话框,点击否(N)。
6、点击“是(Y)”,出现下面的界面。扫描到伺服之后,(1)TSM 文件自动添加 了 NC‐Configuration 项,如图中小标题 1 所示。(2)添加了伺服驱动器:Driver 1(AX5203‐0000‐0010)。图中对话框,点击否(N)。
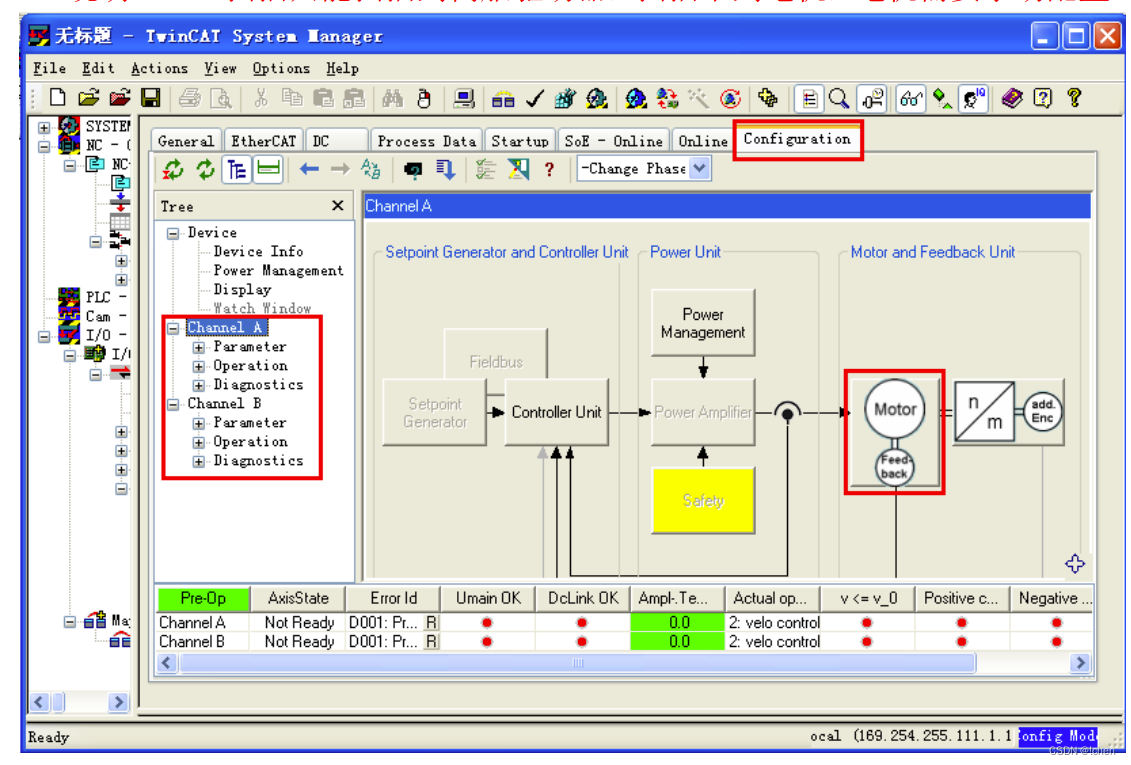
7. 左键点击上图中的 Driver 1(AX5203‐0000‐0010),出现下图的界面

8、上图中的 Configuration 项是调试电机的选项。点击 Configuration,出现下面 的界面。AX5203 是两轴伺服,所以会出现 ChannelA 和 ChannelB,点击 ChannelA,出现 ChannelA 的界面,其中 Motor 项是对电机的配置。TSM 扫描只能扫描到伺服驱动器,扫描不到电机,电机需要手动配置
9、点击上图中的 Motor,出现 Motor 的配置界面。如果是 Beckhoff 自己的电机, 点击 Scan motor and feedback 1*就可以自动扫描到电机的类型和反馈的类 型。 第三方电机的配置需要有相应的.XML 文件。点击 Motor*图标,从 Motor*中 配置电机。
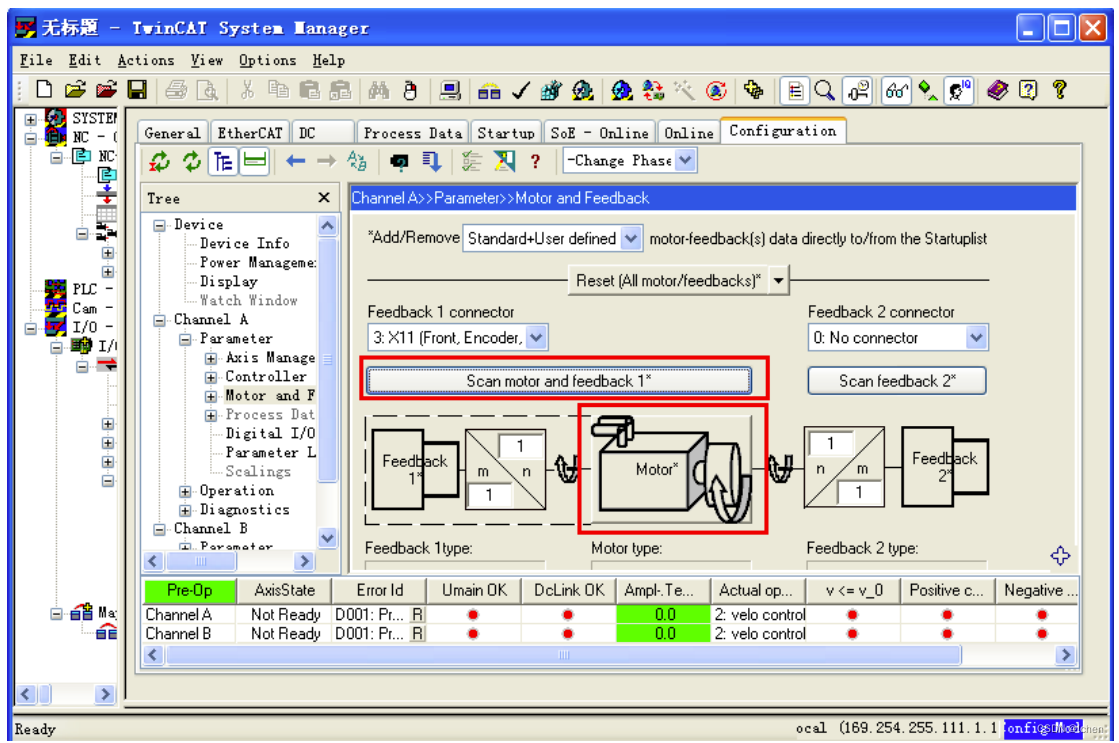
10. 在电机配置的时候,需要把 Change Phase 项选择到 Pre‐Op 项。确保在 Pre‐Op 状态。

11. 点击 Motor*图标,出现下面的对话框

13. 点击Golden Age ‐> TuningRequired ‐> GK ‐> 选择GK6061‐6AF61(电机的类型)
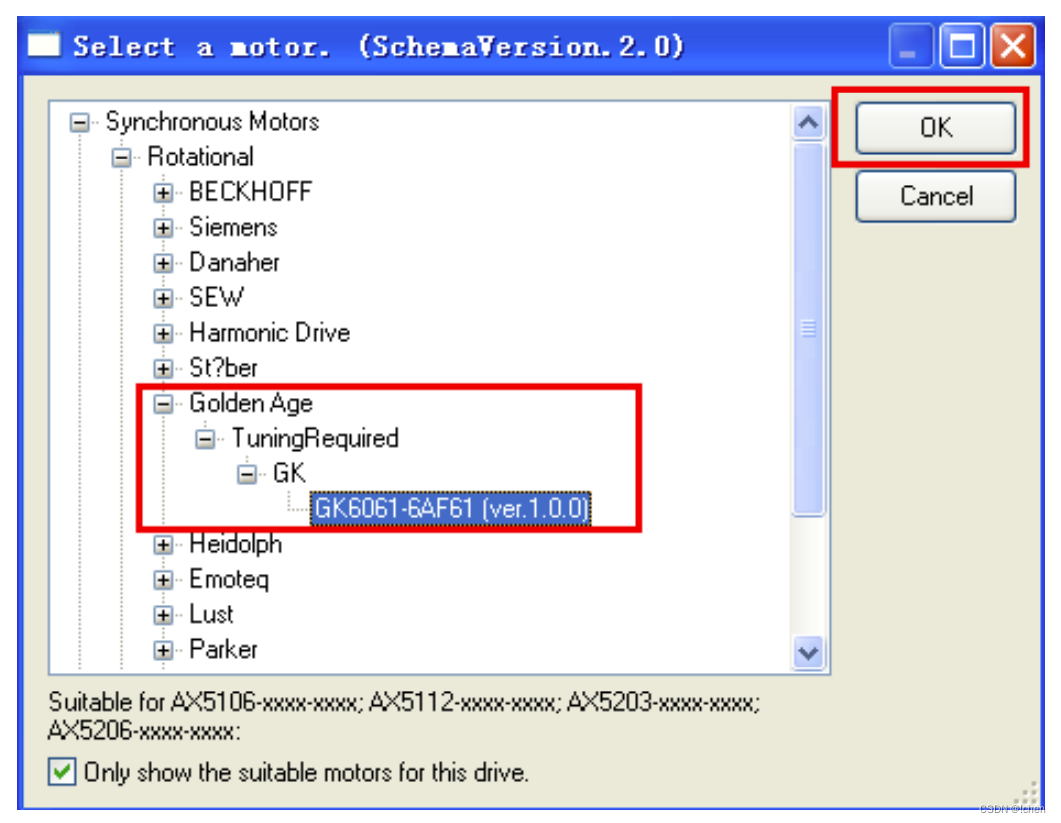
14. 点击上图中的 OK,出现下面的对话框


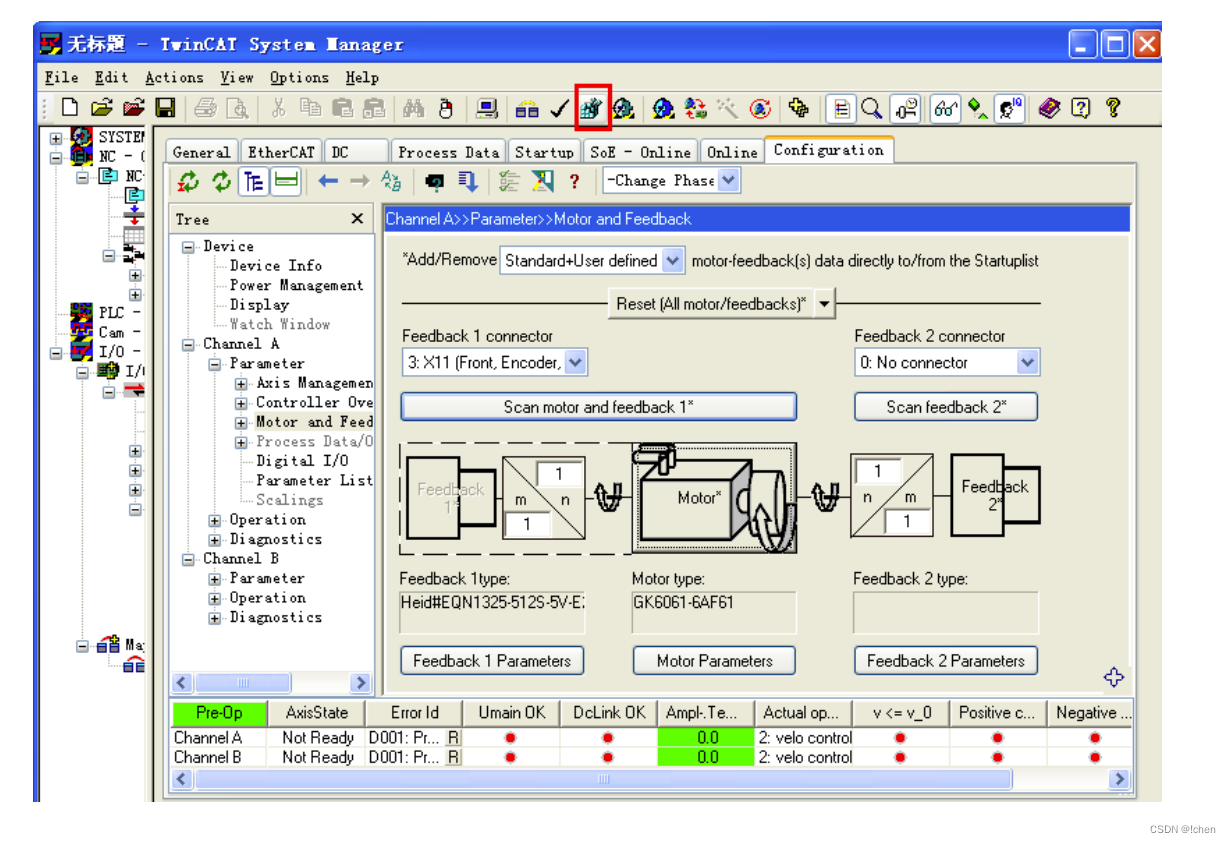
19. 点击 Activate Configuration ,使刚才所做的配置生效。


24. 鼠标左键点击 P‐0‐0150 ‐> Parameter Channel,

26、跳出下面的对话框,选择 “是”。然后点击右侧“OK”按钮。再次点击 Activate Configuration ,使刚才所做的配置生效。
 28. 此时电机会略转一定角度,请勿连接负载。并计算出需要矫正的机械角度。 P‐0‐0058 Mechanical commutation offset 269.80 deg 。(能计算出客户电机的具 体数值)
28. 此时电机会略转一定角度,请勿连接负载。并计算出需要矫正的机械角度。 P‐0‐0058 Mechanical commutation offset 269.80 deg 。(能计算出客户电机的具 体数值)

33. 查看 P‐0‐0167 ‐> Results ‐> commutation position difference。如果这里的角度显 示为 355°到 5°之间(最好在 357°到 3°间),且 EqualDirections 的 Act Value 为“1:Yes”(如果不为 Yes,请检查接线),则说明初始相位角设置成功。


37. 速度环

38、电流环

-
相关阅读:
Redis和Java的爱恨情仇之常见结构命令
HDU 3549 Flow Problem (最大流ISAP)
[C++ 网络协议] IOCP(Input Output Completion Port)
C++ 虚函数表
VLAN原理和配置,交换机创建vlan的多种方法、三种接口模式的作用和配置方法、Access、Trunk、Hybrid接口的特性以及配置方法和命令
优维产品最佳实践第12期:IT资源管理首页丰富
ansible安装
nvm安装node npm没有被安装
阿里云服务器(Ubuntu)配置nextcloud个人网盘
数据治理之数据标准概念
- 原文地址:https://blog.csdn.net/xdpcxq/article/details/134053336