-
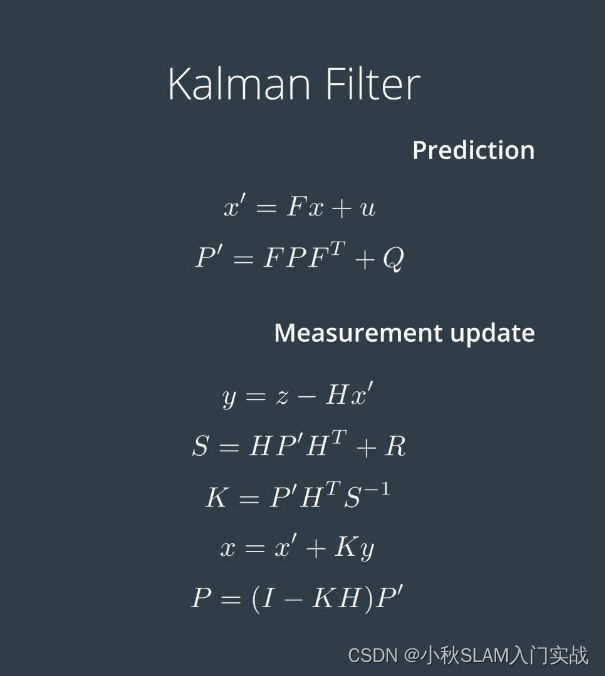
激光雷达数据为例滤波器
-
相关阅读:
字符串,字符数组,类型转换,整数越界,浮点数,枚举
通过SSH 可以访问Ubuntu Desktop吗?
[管理与领导-100]:管理者到底是什么?调度器?路由器?交换机?监控器?
Java SqlSessionFactoryBean.setMapperLocations方法代码示例
API自动化(四)
字节跳动发Seed-TTS语音合成模型,可模仿任意人的声音,效果逼真
代码随想录算法训练营第七天|LeetCode 454. 四数相加 II 、383. 赎金信、 15. 三数之和、18. 四数之和
传统订货方式和网上企业APP订货方式的差别|网站搭建|小程序开发
华为云云耀云服务器L实例评测|Ubuntu 22.04部署edusoho-ct企培版教程 | 支持华为云视频点播对接CDN加速
机器人编程初学者教程书:开启智能之旅的全方位指南
- 原文地址:https://blog.csdn.net/qq_21950671/article/details/134014711