-
imu预积分学习(更新中)
imu预积分学习(更新中)
IMU预积分可以做什么?
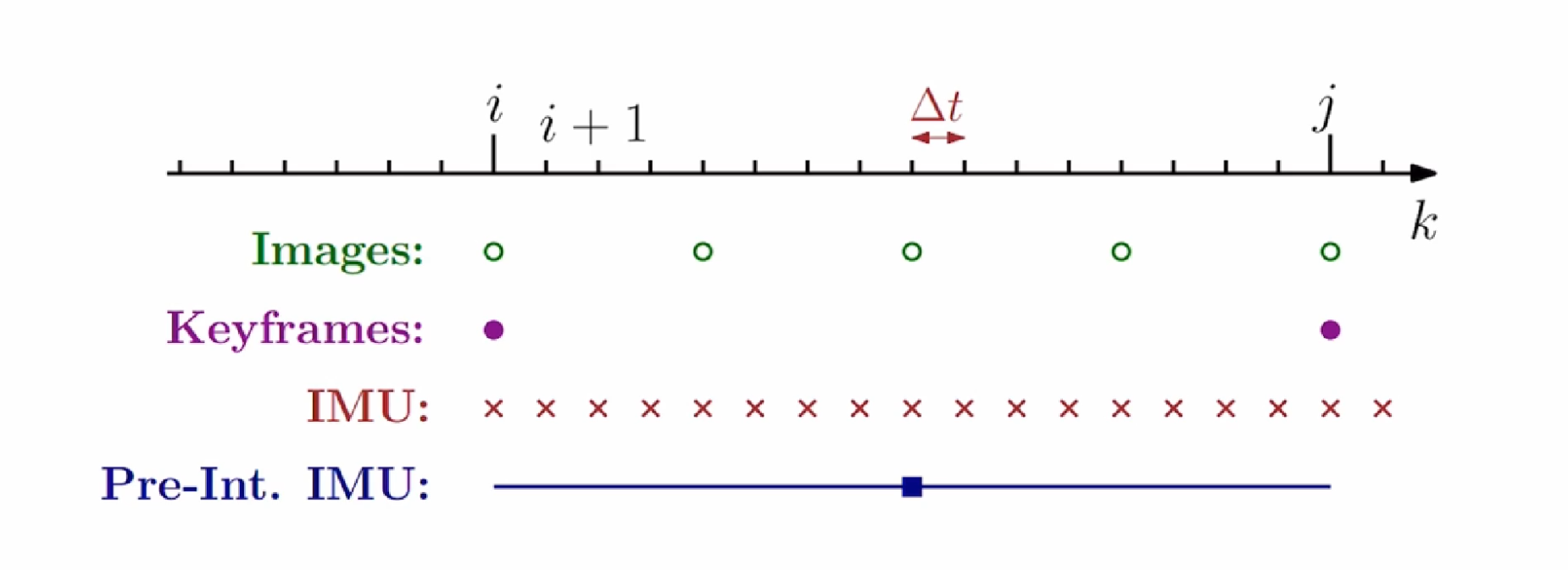
以上面那个经典图片为例子,IMU可以通过六轴数据,拿到第i帧和第j帧之间的相对位姿,这样不就可以去用来添加约束了吗但是有一个比较大的问题是:
IMU积分和初始位姿是相关的, 这样如果我们优化之后,第i帧的位姿变了,那么IMU积分的结果(也就是计算出来的相对位姿)不就不准了吗?直白的解决方法是拿优化后的位姿再积分一遍,不久解决了吗,但是这样运算量太大了,而且解决不了根源问题。那么就提出了预积分, 解决思路是: 直接计算两帧之间的相对位姿,而不依赖初始值影响, 这也就是预积分的预的由来。
需要注意的是,预积分相比暴力重新计算,只是用来减少计算量的,而不能提高精度。
-
相关阅读:
狮子鱼社区团购小程序v18.1独立全开源版+小程序前端
java中GC的日志认识详解
20220810
lnmp环境部署
SAP-QM-质检收货时报错
Qt5开发从入门到精通——第四篇十三节(程序启动画面 )
【mysql】出现 slow sql 问题及建议
react自定义hook解决websocket连接,useWebSocket
腾讯高工用 4 部分就讲清楚了 Spring 全家桶 + 微服务
解决使用flex布局引起的变形问题
- 原文地址:https://blog.csdn.net/my_id_kt/article/details/133999681