-
Fast DDS之Subscriber
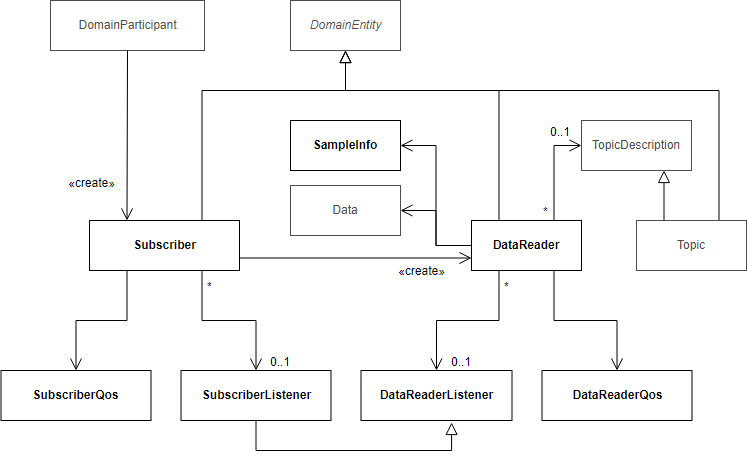
Subscriber扮演容器的角色,里面可以有很多DataReaders,它们使用Subscriber的同一份SubscriberQos配置。Subscriber可以承载不同Topic和数据类型的DataReader对象。Subscriber
SubscriberQos
默认Qos配置可以通过DomainParticipant实例的
get_default_subscriber_qos()函数获取。先前创建的qos也可以通过Subscriber::set_qos()函数重新设置。值SUBSCRIBER_QOS_DEFAULT可以在创建sub或修改时(create_subscriber() or Subscriber::set_qos())直接使用SubscriberListener
SubscriberListener是个抽象类,继承自DataReaderListener。
class SubscriberListener : public DataReaderListener { public: /** * @brief Constructor */ RTPS_DllAPI SubscriberListener() { } /** * @brief Destructor */ RTPS_DllAPI virtual ~SubscriberListener() { } /** * Virtual function to be implemented by the user containing the actions to be performed when a new * Data Message is available on any reader. * * @param sub Subscriber */ RTPS_DllAPI virtual void on_data_on_readers( Subscriber* sub) { (void)sub; } };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
用户需要根据自己的需要继承并实现。
callback:on_data_on_readers()创建Subscriber
- 通过DomainParticipant的create_subscriber()函数创建,SubscriberQos参数是必需的,有个默认值SUBSCRIBER_QOS_DEFAULT可以使用,SubscriberListener和StatusMask参数可选。
// 创建DomainParticipant实例participant Subscriber* subscriber_with_default_qos = participant->create_subscriber(SUBSCRIBER_QOS_DEFAULT); if (nullptr == subscriber_with_default_qos) { // Error return; }- 1
- 2
- 3
- 4
- 5
- 6
- 基于Profile创建Subscriber:用于标识subscriber的字符串名字参数是必需的,继承自SubscriberListener或DataReaderListener的Listener和StatusMask是可选的
Subscriber* subscriber_with_profile = participant->create_subscriber_with_profile("subscriber_profile"); if (nullptr == subscriber_with_profile) { // Error return; }- 1
- 2
- 3
- 4
- 5
删除Subscriber
需要先删除Subscriber中的所有实体(DataReaders),再调用
delete_subscriber()删除Subscriber// Delete the entities the subscriber created if (subscriber->delete_contained_entities() != ReturnCode_t::RETCODE_OK) { // Subscriber failed to delete the entities it created return; } // Delete the Subscriber if (participant->delete_subscriber(subscriber) != ReturnCode_t::RETCODE_OK) { // Error return; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
DataReader
DataReader只归属于创建它的Subscriber,每个DataReader在它创建支持绑定到单一的Topic上,所以Topic必须是在DataReader创建之前就已经创建。远端pub的消息可以通过
DataReader::read_next_sample()或DataReader::take_next_sample()函数获取。DataReaderQos
DataReaderListener
用于监听DataReader状态的改变。默认是空实现,需要用户重新继承实现。有以下callback成员函数:
- on_data_available:回调函数,表示有数据收到,可以在这个回调中主动去获取数据
- on_subscription_matched:服务发现回调
- on_requested_deadline_missed()
- on_requested_incompatible_qos()
- on_liveliness_changed()
- on_sample_rejected()
- on_sample_lost()
DataReader的创建
- 绑定到要传输数据的Topic和DataReaderQos是必需的参数,DataReaderListener和StatusMask是可选的
DataReader* data_reader_with_default_qos = subscriber->create_datareader(topic, DATAREADER_QOS_DEFAULT); if (nullptr == data_reader_with_default_qos) { // Error return; }- 1
- 2
- 3
- 4
- 5
- 基于Profile创建DataReader
reader_ = subscriber_->create_datareader_with_profile(topic_, "test_timebasedfilter", &listener_);- 1
- 使用自定义的PayloadPool创建DataReader(为什么要使用自定义的PayloadPool?)
// A DataReaderQos must be provided to the creation method DataReaderQos qos; // Create PayloadPool std::shared_ptr<CustomPayloadPool> payload_pool = std::make_shared<CustomPayloadPool>(); DataReader* data_reader = subscriber->create_datareader(topic, qos, nullptr, StatusMask::all(), payload_pool); if (nullptr == data_reader) { // Error return; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
删除DataReader
同理,删除DataReader之前需要删除所有属于DataReader的实体(QueryConditions)
// Delete the entities the DataReader created if (data_reader->delete_contained_entities() != ReturnCode_t::RETCODE_OK) { // DataReader failed to delete the entities it created. return; } // Delete the DataReader if (subscriber->delete_datareader(data_reader) != ReturnCode_t::RETCODE_OK) { // Error return; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
SampleInfo
一个重要的数据结构,为每个DataReader提供了相关数据的元数据信息,包括:
- 数据样本的状态,如是否被修改或是否被读走
- 数据样本的来源,如发布者的实例句柄或公开的实例句柄
- 数据样本的序列号,这对确保数据样本的顺序接收非常重要
- 数据样本的时间戳,即样本何时被写入或修改
- 数据样本是否有效,无效的数据样本通常表示实例的生命周期已经结束
读取数据
通过reading或taking接收和消费DataReader读到的数据。reading和taking的这些函数实现都是一样的:
- DataReader::read_next_sample / DataReader::take_next_sample
- DataReader::read(), DataReader::read_instance(), DataReader::read_next_instance() / DataReader::take(), DataReader::take_instance(), DataReader::take_next_instance():获取符合特定条件的samples的集合
通过callback获取数据
两个Listener的callbacks,可以自定义listener继承自DataReaderListener:
- on_data_available()
- on_data_readers()
通过启动一个等待线程处理
- 异步
// Create a DataReader DataReader* data_reader = subscriber->create_datareader(topic, DATAREADER_QOS_DEFAULT); if (nullptr == data_reader) { // Error return; } // Prepare a wait-set to wait for data on the DataReader WaitSet wait_set; StatusCondition& condition = data_reader->get_statuscondition(); condition.set_enabled_statuses(StatusMask::data_available()); wait_set.attach_condition(condition); // Create a data and SampleInfo instance Foo data; SampleInfo info; //Define a timeout of 5 seconds eprosima::fastrtps::Duration_t timeout (5, 0); // Loop reading data as it arrives // This will make the current thread to be dedicated exclusively to // waiting and reading data until the remote DataWriter dies while (true) { ConditionSeq active_conditions; if (ReturnCode_t::RETCODE_OK == wait_set.wait(active_conditions, timeout)) { while (ReturnCode_t::RETCODE_OK == data_reader->take_next_sample(&data, &info)) { if (info.valid_data) { // Do something with the data std::cout << "Received new data value for topic " << topic->get_name() << std::endl; } else { // If the remote writer is not alive, we exit the reading loop std::cout << "Remote writer for topic " << topic->get_name() << " is dead" << std::endl; break; } } } else { std::cout << "No data this time" << std::endl; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 同步,通过DataReader::wait_for_unread_message() 函数等待直到数据到达或者时间超时
// Create a DataReader DataReader* data_reader = subscriber->create_datareader(topic, DATAREADER_QOS_DEFAULT); if (nullptr == data_reader) { // Error return; } // Create a data and SampleInfo instance Foo data; SampleInfo info; //Define a timeout of 5 seconds eprosima::fastrtps::Duration_t timeout (5, 0); // Loop reading data as it arrives // This will make the current thread to be dedicated exclusively to // waiting and reading data until the remote DataWriter dies while (true) { if (data_reader->wait_for_unread_message(timeout)) { if (ReturnCode_t::RETCODE_OK == data_reader->take_next_sample(&data, &info)) { if (info.valid_data) { // Do something with the data std::cout << "Received new data value for topic " << topic->get_name() << std::endl; } else { // If the remote writer is not alive, we exit the reading loop std::cout << "Remote writer for topic " << topic->get_name() << " is dead" << std::endl; break; } } } else { std::cout << "No data this time" << std::endl; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
-
相关阅读:
基于Pytorch的CNN手写数字识别
最高可达100倍压缩!钒星北斗开放平台:渐进式图片压缩库,实现北斗三号RDSS短报文图片传输
【Rust】操作日期与时间
Go 语言切片是如何扩容的?
CSS补充
文心一言 VS 讯飞星火 VS chatgpt (84)-- 算法导论8.2 1题
【MySQL】左连接右连接内连接与Hash连接、子查询原理与实战(MySQL专栏启动)
flink核心之watermarker
JavaScript【立即调用的函数(IIFE)、eval 命令、函数的应用、对象概述、对象属性、对象方法、函数应用注意事项、Math对象_静态属性、Math对象_静态方法一】(八)
Non-constant range: argument must be an integer literal
- 原文地址:https://blog.csdn.net/u010378559/article/details/133933962
