-
MATLAB神经网络和优化算法
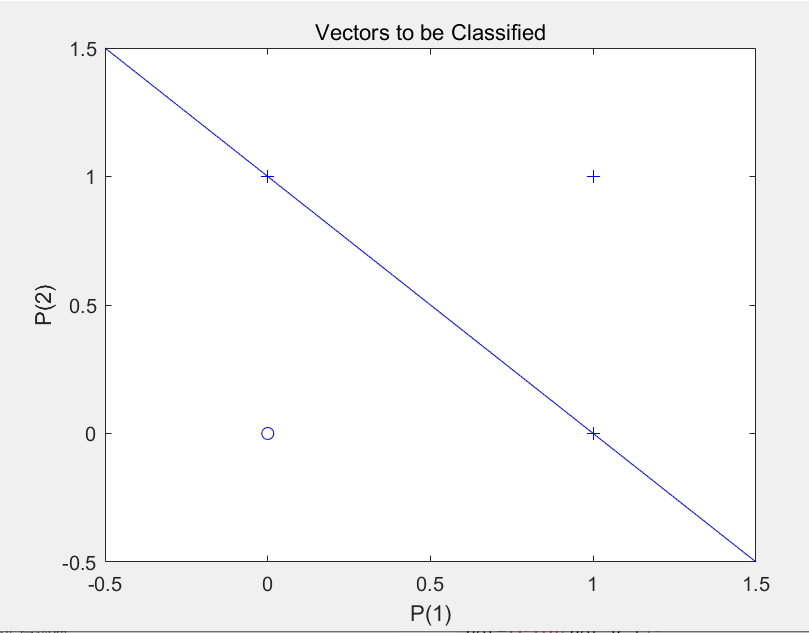
1. matlab感知器神经网络初步学习
%% 学习目标:从学习第一个最简单的神经网络案例开启学习之路 %% 感知器神经网络 用于点的分类 clear all; close all; P=[0 0 1 1;0 1 0 1]; %输入向量 T=[0 1 1 1]; %目标向量 net=newp(minmax(P),1,'hardlim','learnp'); %建立感知器神经网络 net=train(net,P,T); %对网络进行训练 Y=sim(net,P); %对网络进行仿真 plotpv(P,T); %绘制感知器的输入向量和目标向量,绘制样本点 plotpc(net.iw{1,1},net.b{1}); %在感知器向量图中绘制分界线- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
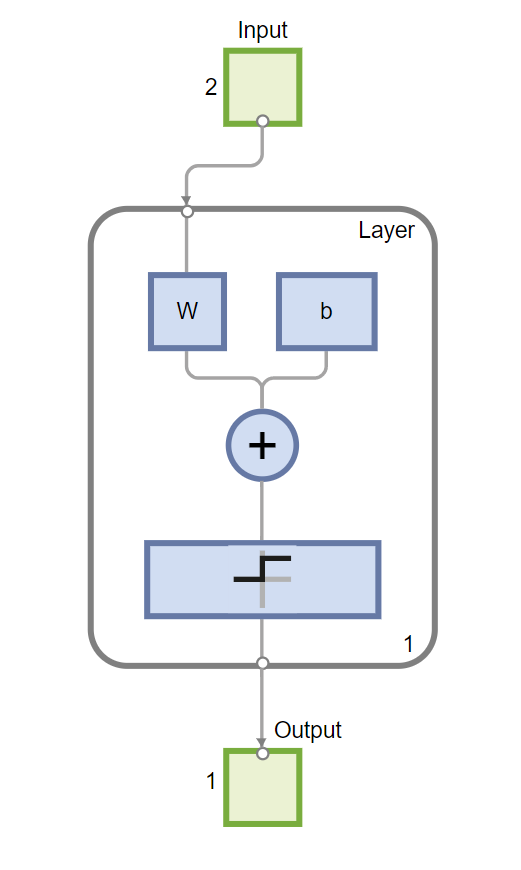
运行结果:
网络图:
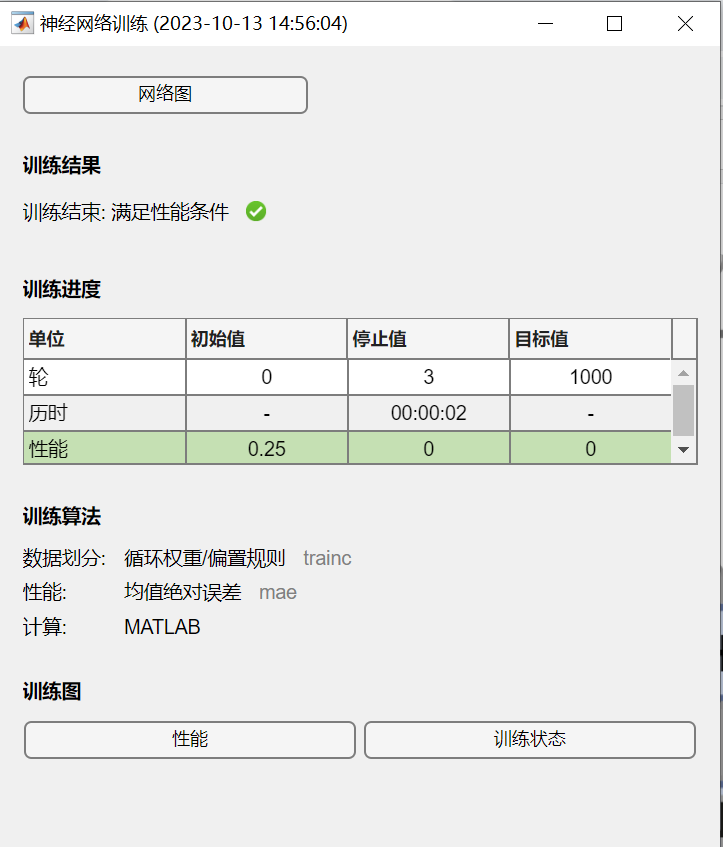
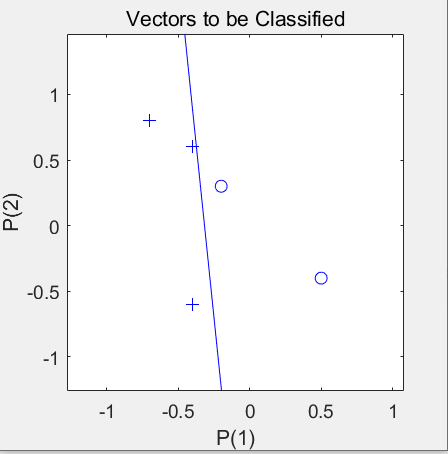
2 使用建立好的神经网络进行分类程序
clear all; close all; P=[-0.4 -0.4 0.5 -0.2 -0.7;-0.6 0.6 -0.4 0.3 0.8]; %输入向量 T=[1 1 0 0 1]; %输出向量 plotpv(P,T); %绘制样本 net=newp(minmax(P),1,'hardlim','learnpn'); %建立神经网络 hold on; linehandle=plot(net.IW{1},net.b{1}); E=1; net.adaptParam.passes=10; while mae(E) %误差达到要求才停止训练 [net,Y,E]=adapt(net,P,T); %进行感知器神经网络的训练 linehandle=plotpc(net.IW{1},net.b{1},linehandle); drawnow; end save net1 net; %将训练好的神经网络进行保存 set(gcf,'position',[60,60,300,300]);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
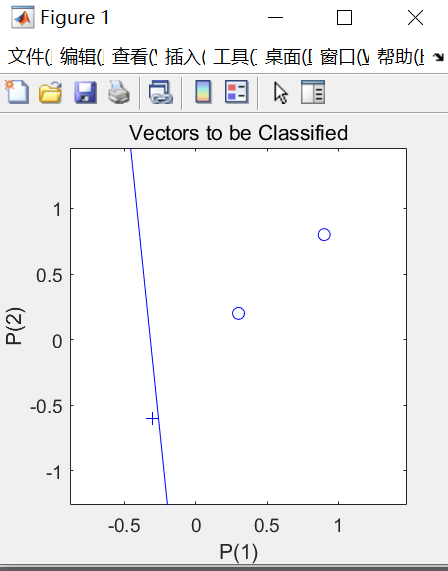
%% 用刚才建立的神经网络进行分类 clear all; close all; load net1.mat; %加载上次训练好的神经网络 X=[-0.3 0.3 0.9;-0.6 0.2 0.8]; %输入向量 Y=sim(net,X); %对输入进行仿真 figure; plotpv(X,Y); %绘制样本点 plotpc(net.IW{1},net.b{1}); %绘制分类线 set(gcf,'position',[60,60,300,300]);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
3 线性神经网络预测程序
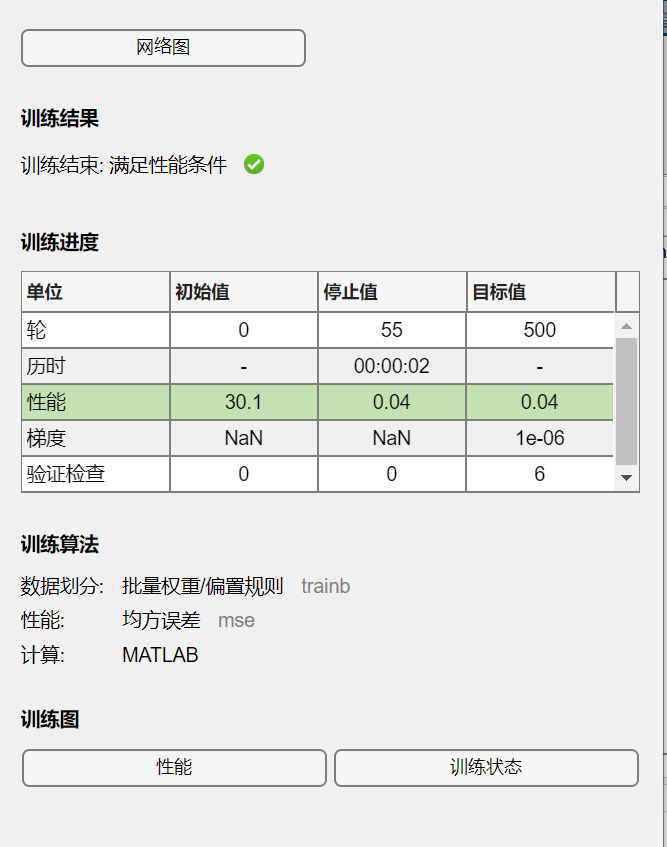
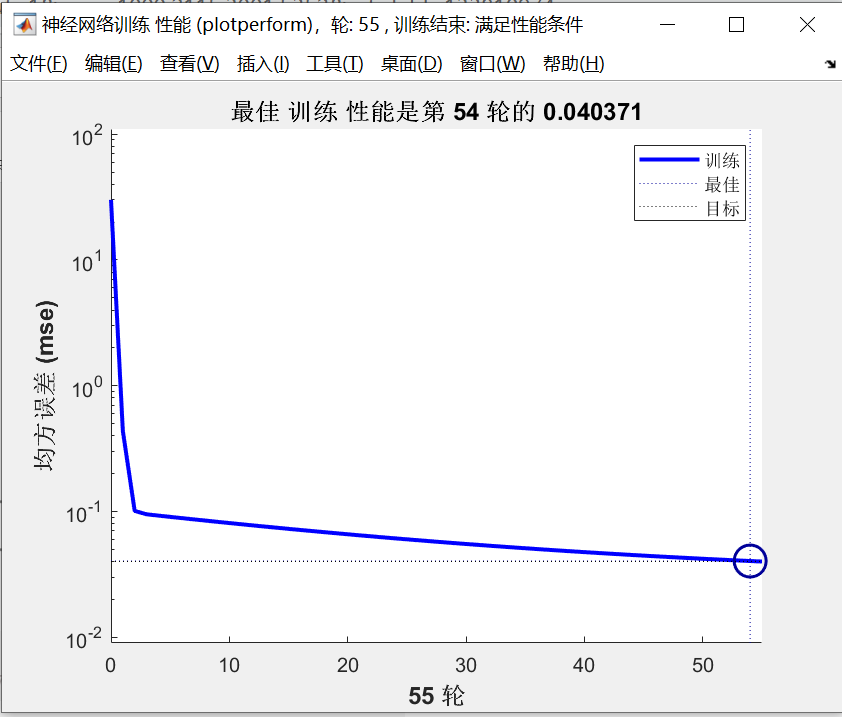
%% 学习目标: 线性神经网络 %% 收敛速度和精度比之前讲的感知器神经网络要高, %% 主要应用在函数逼近,信号预测,模式识别,系统辨识方面 clear all; close all; P=[1.1 2.2 3.1 4.1]; T=[2.2 4.02 5.8 8.1]; lr=maxlinlr(P); %获取最大学习速率 net=newlin(minmax(P),1,0,lr); %建立线性神经网络 net.trainParam.epochs=500; %训练 做多500次 net.trainParam.goal=0.04; %训练误差设定为0.04 net=train(net,P,T); Y=sim(net,P) %仿真- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
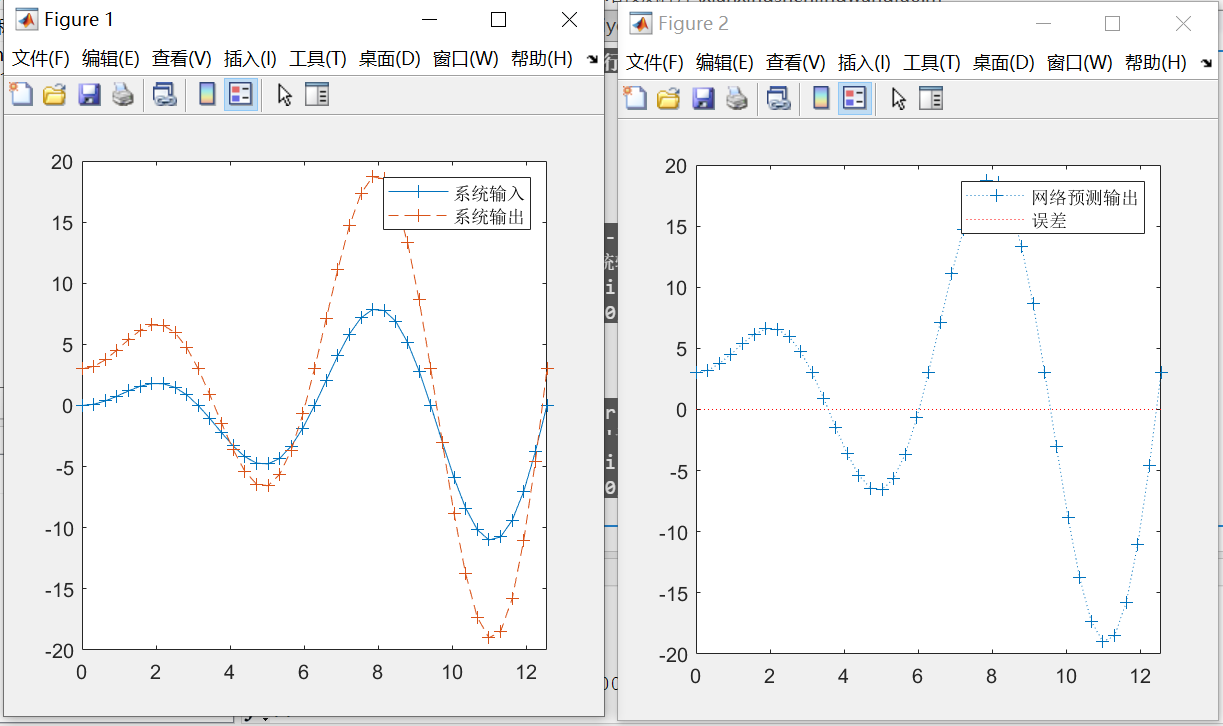
%% 利用线性神经网络进行信号的预测 clear all; close all; t=0:pi/10:4*pi; X=t.*sin(t); T=2*X+3; figure; plot(t,X,'+-',t,T,'+--'); legend('系统输入','系统输出'); set(gca,'xlim',[0 4*pi]); set(gcf,'position',[50,50,400,400]); net=newlind(X,T); y=sim(net,X); figure; plot(t,y,'+:',t,y-T,'r:'); legend('网络预测输出','误差'); set(gca,'xlim',[0 4*pi]); set(gcf,'position',[50,50,400,400]);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
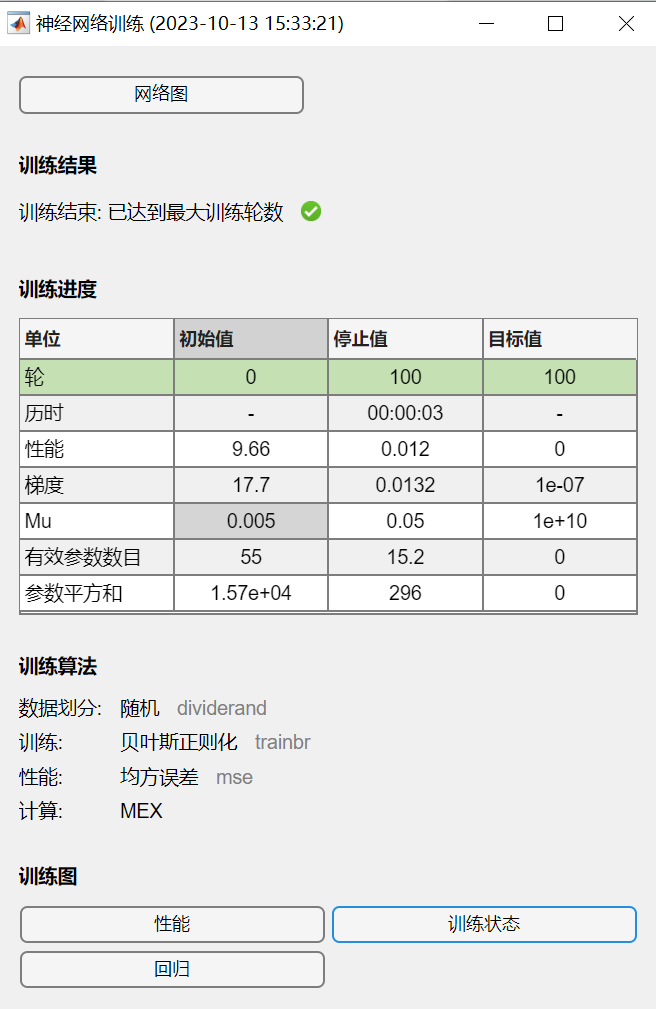
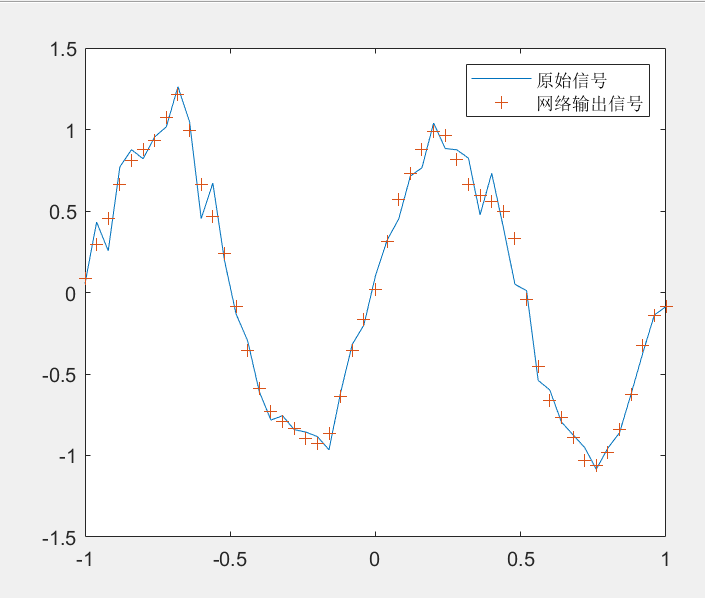
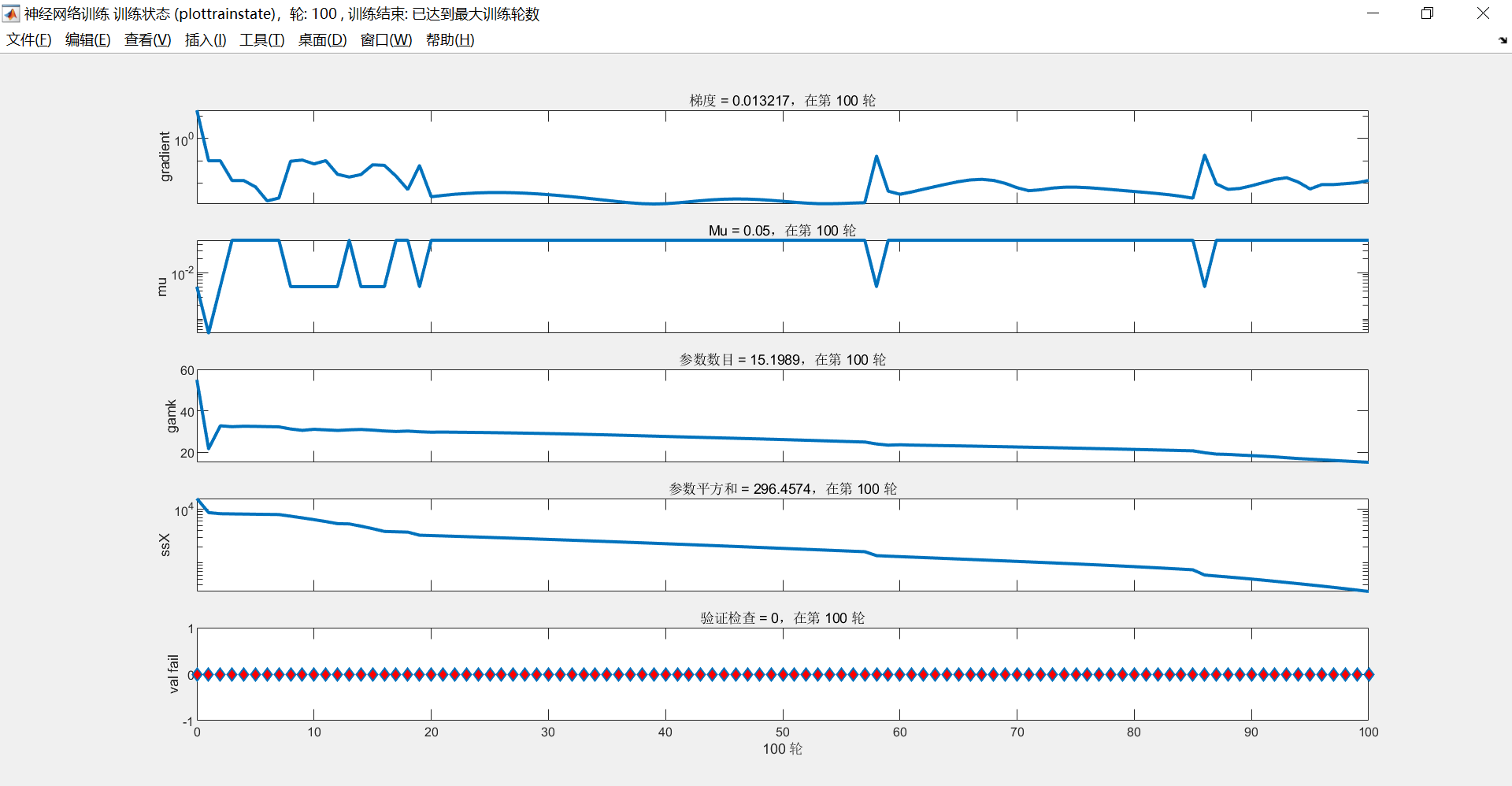
4 BP神经网络信号拟合程序
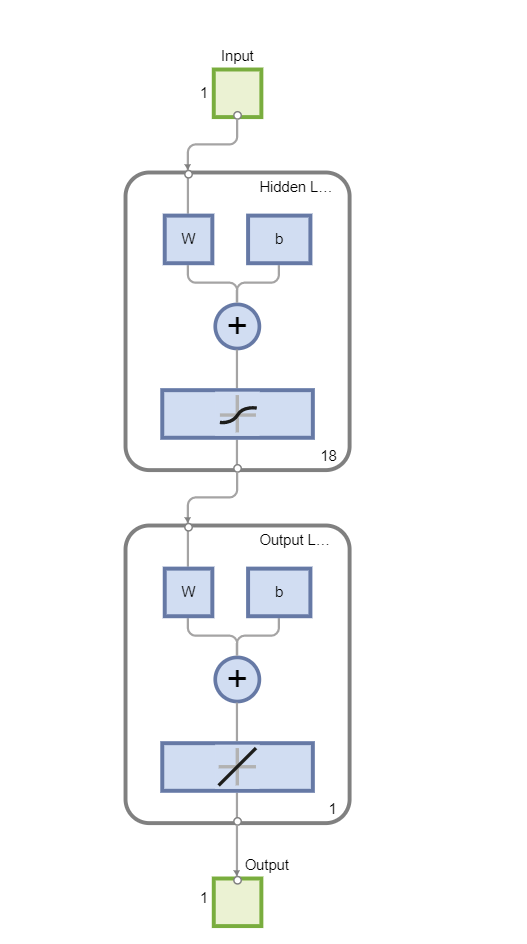
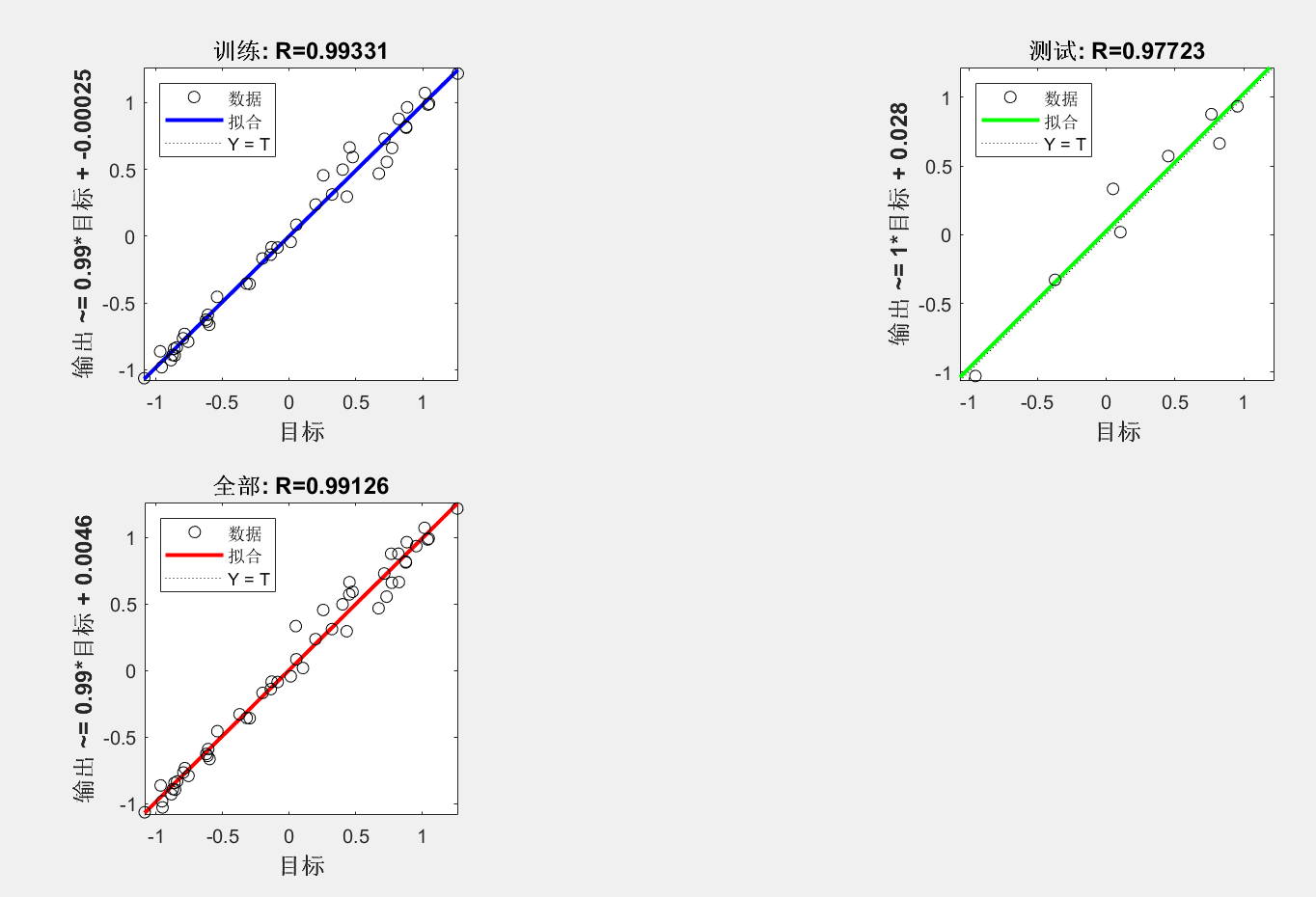
%% 学习目标:BP神经网络 %% 函数逼近 数据压缩 模式识别 %% 考虑要素:网络层数 输入层的节点数 输出层的节点数 隐含层的节点数 %% 传输函数 训练方法 %% 对信号曲线进行拟合 clear all; clear all; P=-1:0.04:1; T=sin(2*pi*P)+0.1*randn(size(P)); net=newff(P,T,18,{},'trainbr'); %% 隐含层神经元个数是18 net.trainParam.show=10; net.trainParam.epochs=100; %% 训练100次 net=train(net,P,T); Y=sim(net,P); figure; plot(P,T,'-',P,Y,'+'); legend('原始信号','网络输出信号'); set(gcf,'position',[20,20,500,400]);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
网络图:
回归:
训练状态:
-
相关阅读:
内核驱动mmap Handler利用技术(二)
鸿鹄工程项目管理系统 Spring Cloud+Spring Boot+前后端分离构建工程项目管理系统
vue基础入门
Linux系统上安装软件
嵌入式软件工程师面试题(九)
LabVIEW为什么在存储VI时死机
基于ECS搭建云上博客WordPress,使用Apache+MariaDB+PHP环境
ASP.NET LIMS系统全套源码(演示+自主版权+项目使用)
猿创征文|前端安全(XSS和CSRF)
腾讯云4核8G12M轻量服务器优惠价格446元一年,646元15个月
- 原文地址:https://blog.csdn.net/qq_45823731/article/details/133810974
