-
嵌入式开发学习之STM32F407串口(USART)收发数据(三)
此次实现目的:
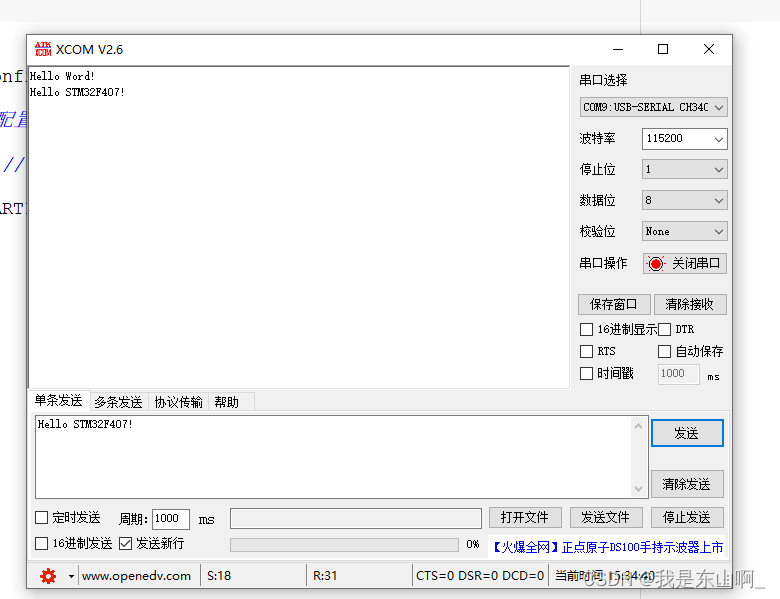
1.芯片上电启动时发送“Hello Word!”
2.发送给芯片的数据,芯片又通过串口发送回来
有工程实例,链接在最底部。开发涉及工具
开发环境(IDE):IAR-ARM8.32.4
开发板:STM32_F4VE_V2.0
下载器:J-Link
串口调试软件:XCOM_V2.6
固件库版本:STM32F4xx_DSP_StdPeriph_Lib_V1.8.0
一、选定所使用的串口
1.我使用的开发板是STM32F407VE芯片,芯片提供有6个串口。在开发板上可以看到其单独引出了串口针脚,那么我们就需要通过原理图来确认这个针脚是连接的哪一个串口,如下图所示,从原理图中我们不难看出,收发引脚是接在芯片的PA9和PA10上面的。
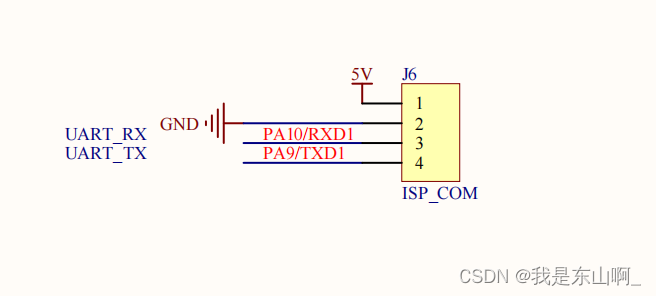
2.我们翻看芯片数据手册的引脚定义表,可以发现PA9对应芯片USART1_TX,PA10对应USART1_RX。现在我们就可以开始配置串口1来达到数据收发的效果。

3.注意:若我们是自己设计电路,则步骤相反。先确认要使用的串口编号,然后确认串口对应的引脚,最后才将其引出针脚二、配置串口
我们依旧可以在固件库里面去找到关于配置USART的例程,在前面配置GPIO的时候我有提到过,这里不再赘述,直接上配置代码
1.配置串口的I/O
这里值得注意的就是要将端口设置成复用模式,其他配置相同;
void USART1_IO_Conf(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);//IO口用作串口引脚要配置复用模式 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//TX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//IO口用作串口引脚要配置复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//RX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOA,&GPIO_InitStructure); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
2.配置串口参数属性
这里值得注意的还有里面调用了一个配置串口中断的函数USART1_NVICConf()(解释一下什么是中断,中断就是有一个事件发生了,我需要打断CPU现在的工作,转而来处理现在发生的事件),用在这里结合此句USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);的意思是配置的数据接收中断,比如说别的设备给我发送了字符,那么CPU你现在啥都别忙干,先来看看这个字符是什么。
void USART1_Conf(uint32_t baud)//配置函数,定义一个形参用于配置波特率 { USART_InitTypeDef USART_InitStructure;//定义配置串口的结构体变量 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//开启串口1的时钟 USART_DeInit(USART1);//大概意思是解除此串口的其他配置 USART_StructInit(&USART_InitStructure); USART_InitStructure.USART_BaudRate = baud;//设置波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字节长度为8bit USART_InitStructure.USART_StopBits = USART_StopBits_1;//1个停止位 USART_InitStructure.USART_Parity = USART_Parity_No ;//没有校验位 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//将串口配置为收发模式 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不提供流控 USART_Init(USART1,&USART_InitStructure);//将相关参数初始化给串口1 USART1_NVICConf();//配置串口的中断 USART_ClearFlag(USART1,USART_FLAG_RXNE);//初始配置时清除接受置位 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//初始配置接收中断 USART_Cmd(USART1,ENABLE);//开启串口1 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
3.配置串口中断
那要如何配置串口的中断呢,其方法如下
void USART1_NVICConf(void) { NVIC_InitTypeDef NVIC_InitStructure;//中断控制结构体变量定义 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道指定为USART1 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//主优先级为0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//次优先级为1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//确定使能 NVIC_Init(&NVIC_InitStructure);//初始化配置此中断通道 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
4.串口中断在哪里处理
那么问题来了,我产生了事件,我CPU要在哪里来查看呢,这就需要中断服务函数来实现,中断服务函数不能随意命名(但对其原来的名字进行重定义也可以),中断服务函数的名称我们在中断向量表中查找,我使用的此版固件在stm32f40_41xx.s大概120行的中断向量表里面找,然后如下编写
void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)//判断是不是真的有中断发生 { USART_SendData(USART1,USART_ReceiveData(USART1));//又将数据发回去 USART_ClearITPendingBit(USART1, USART_IT_RXNE); //已经处理就清楚标志位 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
5.串口如何发送字符串
我们写一个通过串口发送字符串的函数,可如下编写:
void Usart_SendString(USART_TypeDef* USARTx,uint8_t *data,uint32_t dataLen) { uint32_t i; for(i = 0;i < dataLen;i ++) { USART_SendData(USARTx,data[i]);//发送数据 while(USART_GetFlagStatus(USARTx,USART_FLAG_TXE) == RESET);//等待发送完成 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
三、封装串口配置库文件
由于我们配置串口和使用串口的功能函数比较多,放在一个源文件里面比较杂乱,那么我们可以直接将关于使用串口的文件封装成库文件,通过导入头文件就可使用,方法如下
1.创建头文件(.h)文件
在IAR新建一个空白文件,保存为usart.h(如何新建文件和保存文件,我在《嵌入式开发学习之STM32F407芯片IAR环境搭建空白工程(一)》有提到,不做赘述),然后语法格式如下,
#ifndef _USART_H//.h文件三要素之一 #define _USART_H//.h文件三要素之一 #include "stm32f4xx.h"//依据自身工程情况导入头文件 //外部可调用函数的声明 void USART1_IO_Conf(void); void USART1_Conf(uint32_t baud); void Usart_SendString(USART_TypeDef* USARTx,uint8_t *data,uint32_t dataLen); #endif//.h文件三要素之一- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
2.创建源文件(.c)文件
在IAR新建一个空白文件,保存为usart.h,然后语法格式如下,
#include "usart.h" void USART1_IO_Conf(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);//IO口用作串口引脚要配置复用模式 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;//TX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//IO口用作串口引脚要配置复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//RX引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_Init(GPIOA,&GPIO_InitStructure); } void USART1_NVICConf(void) { NVIC_InitTypeDef NVIC_InitStructure;//中断控制结构体变量定义 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道指定为USART1 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//主优先级为0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//次优先级为1 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//确定使能 NVIC_Init(&NVIC_InitStructure);//初始化配置此中断通道 } void USART1_Conf(uint32_t baud)//配置函数,定义一个形参用于配置波特率 { USART_InitTypeDef USART_InitStructure;//定义配置串口的结构体变量 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//开启串口1的时钟 USART_DeInit(USART1);//大概意思是解除此串口的其他配置 USART_StructInit(&USART_InitStructure); USART_InitStructure.USART_BaudRate = baud;//设置波特率 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字节长度为8bit USART_InitStructure.USART_StopBits = USART_StopBits_1;//1个停止位 USART_InitStructure.USART_Parity = USART_Parity_No ;//没有校验位 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//将串口配置为收发模式 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不提供流控 USART_Init(USART1,&USART_InitStructure);//将相关参数初始化给串口1 USART1_NVICConf();//配置串口的中断 USART_ClearFlag(USART1,USART_FLAG_RXNE);//初始配置时清除接受置位 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//初始配置接受中断 USART_Cmd(USART1,ENABLE);//开启串口1 } /******** 串口1 中断服务函数 ***********/ void USART1_IRQHandler(void) { if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)//判断是不是真的有中断发生 { USART_SendData(USART1,USART_ReceiveData(USART1));//又将数据发回去 USART_ClearITPendingBit(USART1, USART_IT_RXNE); //已经处理就清楚标志位 } } void Usart_SendString(USART_TypeDef* USARTx,uint8_t *data,uint32_t dataLen) { uint32_t i; for(i = 0;i < dataLen;i ++) { USART_SendData(USARTx,data[i]);//发送数据 while(USART_GetFlagStatus(USARTx,USART_FLAG_TXE) == RESET);//等待发送完成 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
四、功能实现
功能实现时我们在主函数中调用配置函数即可,编写如下
#include "stm32f4xx.h" #include "delay.h" #include "usart.h" void main() { NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//使用了中断,则这一句必须要有 USART1_IO_Conf();//配置串口的IO USART1_Conf(115200);//串口配置成波特率115200 Usart_SendString(USART1,"Hello Word!\r\n",13);//发送字符串 while(1) { } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
实验结果:
工程实例链接:https://download.csdn.net/download/qq_45100839/88425993 -
相关阅读:
linux集群上的SCHRODINGER 分子对接工作流程
Systrace系列10 —— Binder 和锁竞争解读
MongoDB 原子操作:确保数据一致性和完整性的关键
1.Type类型详解
windows11系统如何设置锁屏壁纸
Python ML实战-工业蒸汽量预测02-数据探索
Qt学习11 Qt 中的字符串类
基于B/S的影视创作论坛的设计与实现(附:源码 论文 sql文件 项目部署教程)
MEV进入比特币,它将改变比特币挖矿?
Kafka3.0.0版本——文件清理策略
- 原文地址:https://blog.csdn.net/qq_45100839/article/details/133818824
